Historique du plan
Introduction
L’historique global du plan est présenté sous forme d’arborescence, qui contient chaque nœud de l’ensemble du processus de planification de trajectoire depuis Mech-Viz.
Comparé au journal, l’historique du plan contient plus de détails sur chaque nœud (en particulier en cas d’erreur) du processus.
-
Certaines erreurs sont des erreurs en série, ce qui signifie que si l’erreur se produit sur l’un des nœuds, le résultat final du plan échouera. Par exemple, le TCP d’un point de passage fixe est mal configuré et le robot ne peut pas se déplacer jusqu’au point de passage prévu.
-
Certaines erreurs sont des erreurs parallèles, ce qui signifie que le résultat final du plan peut toujours réussir si la planification sur l’un des nœuds parallèles est réussie. Par exemple, lorsque le robot tente d’effectuer une prise avec les points de préhension envoyés par Mech-Vision, si l’un des points de préhension fonctionne, l’objet cible peut être saisi avec succès.
| Vous pouvez vous concentrer sur les nœuds où des erreurs se produisent lors de l’exécution du projet. |
Visualiser les collisions
Calculer et enregistrer les contacts de collision
Lors du réglage du projet, afin d’enregistrer tous les contacts de collision et de les sauvegarder dans l’historique du plan, veuillez cliquer sur Améliorer les performances dans la barre d’outils et désactiver Effectuer uniquement des calculs de collision grossiers sur le nuage de points avant de simuler ou d’exécuter le projet.
Visualisation du résultat de la planification de trajectoire
Cliquez sur n’importe quel élément de l’historique du plan, et l’animation correspondant au plan en cours s’affiche, incluant :
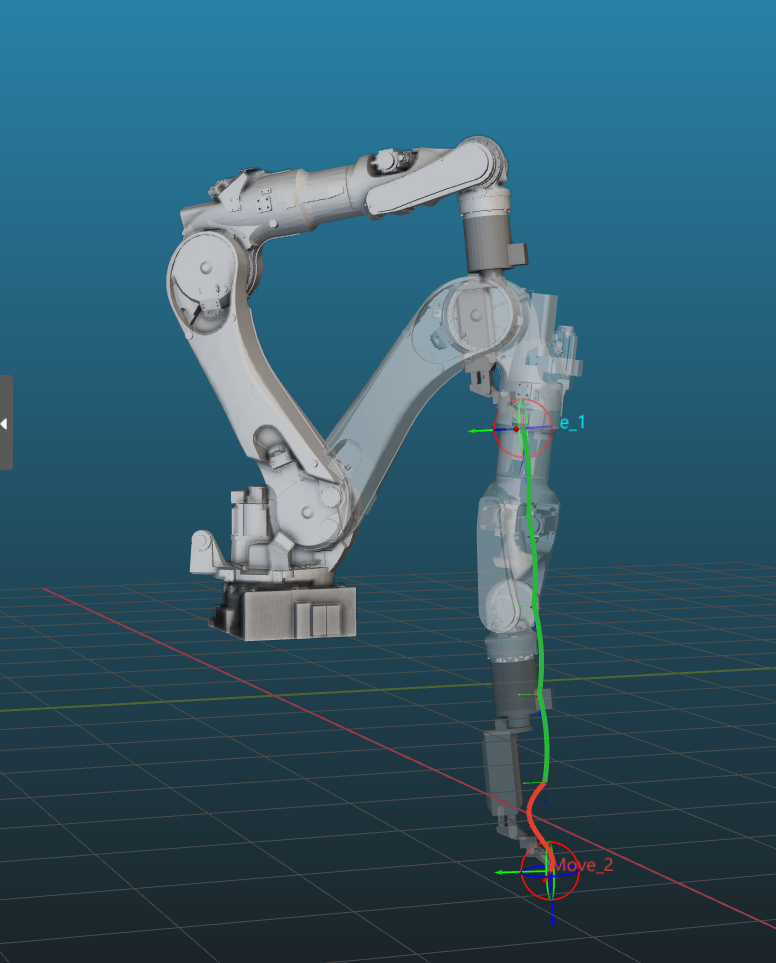
-
La ligne verte pleine représente une trajectoire réussie.
-
La ligne rouge pleine représente une trajectoire avec des collisions.
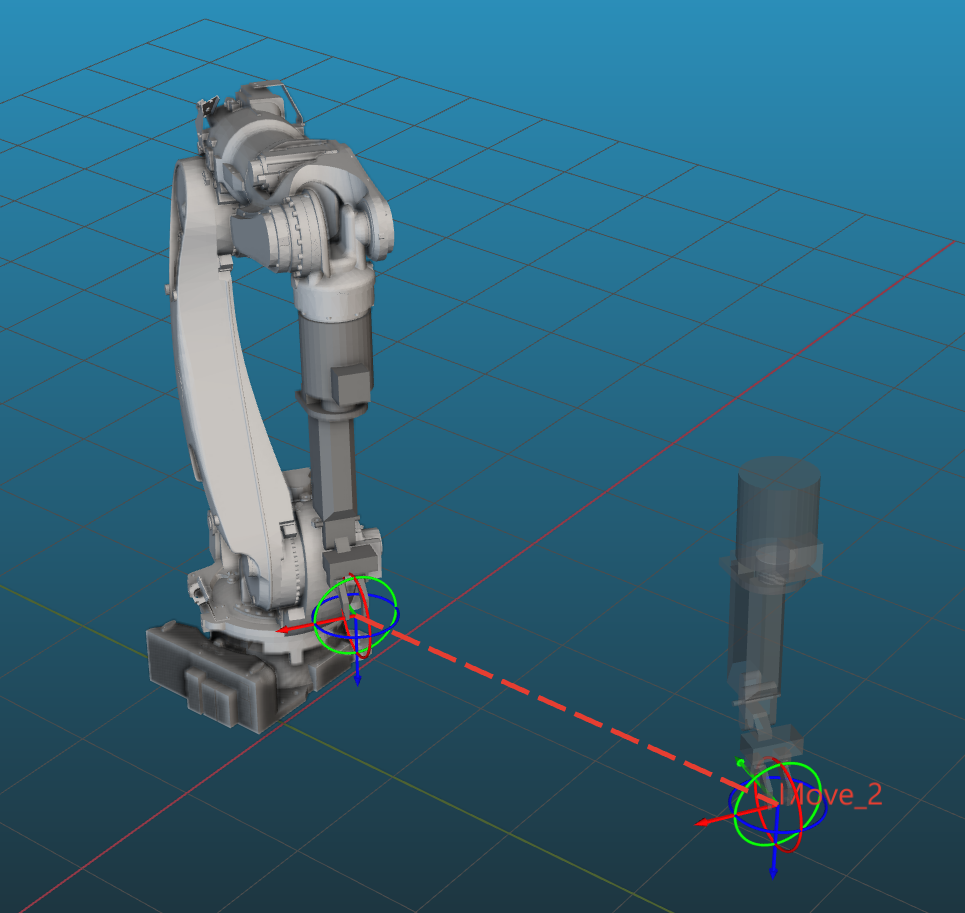
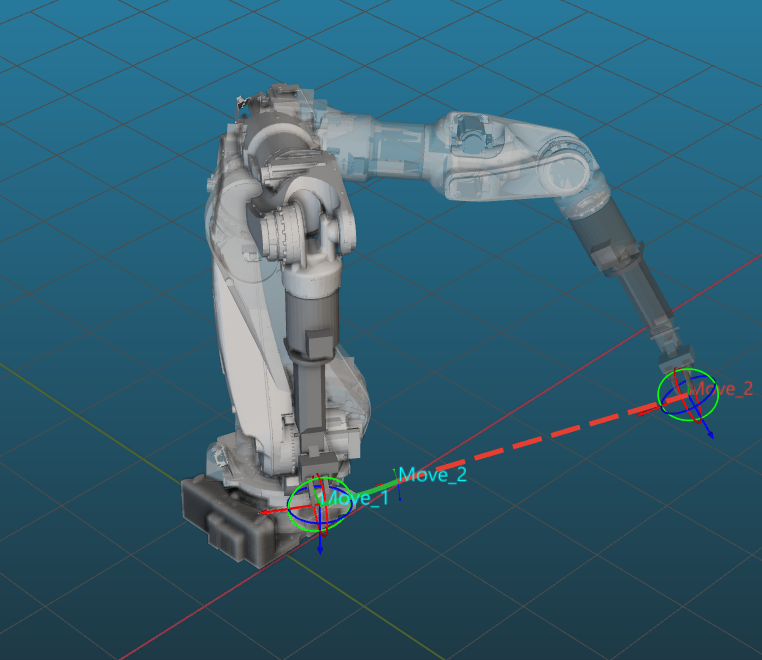
-
La ligne rouge en tirets représente une trajectoire inaccessible.
-
La boule jaune sur la ligne montre la trajectoire du TCP.
-
Les parties mises en évidence représentent les zones où des collisions se produisent.
Interroger l’historique du plan
Le panneau Historique du plan prend en charge la requête des résultats de planification pour des points de préhension ou des objets cibles spécifiques.
-
Sélectionnez Afficher le résultat de planification du point de préhension ou Afficher le résultat de planification de l’objet cible.
-
Sélectionnez dans la liste déroulante Sélectionner le service de vision le projet Mech-Vision qui fournit le résultat de vision.
-
Sélectionnez le point de préhension ou l’objet cible souhaité dans la liste déroulante Sélectionner le point de préhension ou Sélectionner l’objet cible.
-
Si la fonctionnalité Cliquer pour afficher les détails de l’objet cible/du point de préhension est activée, après avoir sélectionné le point de préhension ou l’objet cible, une fenêtre Détails du résultat de vision s’affichera.
-
Si la requête réussit, l’historique de plan correspondant apparaîtra dans la zone Contenu du plan. Cliquez sur l’
 avant chaque historique de plan pour afficher les détails.
avant chaque historique de plan pour afficher les détails. -
Si vous devez effacer le point de préhension ou l’objet cible sélectionné, cliquez sur le bouton
 ou sélectionnez Non spécifié dans la liste déroulante.
ou sélectionnez Non spécifié dans la liste déroulante.
| Si la requête échoue, il se peut que le résultat de vision correspondant n’ait pas été enregistré dans le fichier. Cliquez avec le bouton droit sur Enregistrements de vision dans l’arborescence des ressources du projet, et sélectionnez Limiter le nombre d’enregistrements sauvegardés pour modifier le nombre maximal d’enregistrements de vision sauvegardés. |
Causes des défaillances courantes et correctifs
Les causes des défaillances dans l’historique du plan et les solutions correspondantes sont décrites ci-dessous.
Point de passage inaccessible
| Causes possibles | Solutions |
|---|---|
Point de préhension inapproprié |
Ajoutez davantage de points de préhension ou des tableaux de points de préhension selon la situation réelle. Si l’objet cible est symétrique, vous pouvez configurer la Symétrie de rotation de l’objet cible tenu dans l’éditeur d’objets cibles. De plus, vous pouvez configurer la relaxation translationnelle ou la relaxation rotationnelle pour l’outil dans l’éditeur d’objets cibles afin d’offrir davantage de méthodes de préhension. |
Point de passage fixe inapproprié |
Ajustez le(s) point(s) de passage fixe(s) à un emplacement approprié dans l’espace de travail. |
Disposition du site inappropriée |
Ajustez la disposition du site afin que tous les points de passage se trouvent dans la zone accessible du robot. |
Point de passage inaccessible (Dépasse les limites souples)
| Causes possibles | Solutions |
|---|---|
Limites souples strictes |
Dans le panneau du robot, élargissez les limites souples en ajustant les seuils supérieur et inférieur selon la situation réelle. |
Point de préhension inapproprié |
Ajoutez davantage de points de préhension ou des tableaux de points de préhension selon la situation réelle. Si l’objet cible est symétrique, vous pouvez configurer la Symétrie de rotation de l’objet cible tenu dans l’éditeur d’objets cibles. De plus, vous pouvez configurer la relaxation translationnelle ou la relaxation rotationnelle pour l’outil dans l’éditeur d’objets cibles afin d’offrir davantage de méthodes de préhension. |
Point de passage fixe inapproprié |
Ajustez le(s) point(s) de passage fixe(s) à un emplacement approprié dans l’espace de travail. |
Disposition du site inappropriée |
Ajustez la disposition du site afin que tous les points de passage se trouvent dans la zone accessible du robot. |
Point de passage inaccessible (Viole les contraintes de position d’articulation)
| Causes possibles | Solutions |
|---|---|
Contraintes de position d’articulation inappropriées |
Dans les Paramètres de déplacement de base des Étapes de type déplacement, ajustez les Contraintes des JPs selon la situation réelle. Si une option sous Contraintes des JPs dans les Paramètres de déplacement de base est définie sur Auto, vous pouvez ajuster l’option correspondante sous Contraintes globales des JPs dans le panneau Autres. |
Point de préhension inapproprié |
Ajoutez davantage de points de préhension ou des tableaux de points de préhension selon la situation réelle. Si l’objet cible est symétrique, vous pouvez configurer la Symétrie de rotation de l’objet cible tenu dans l’éditeur d’objets cibles. De plus, vous pouvez configurer la relaxation translationnelle ou la relaxation rotationnelle pour l’outil dans l’éditeur d’objets cibles afin d’offrir davantage de méthodes de préhension. |
Point de passage fixe inapproprié |
Ajustez le(s) point(s) de passage fixe(s) à un emplacement approprié dans l’espace de travail. |
Disposition du site inappropriée |
Ajustez la disposition du site afin que tous les points de passage se trouvent dans la zone accessible du robot. |
Singularité du robot (la vitesse articulaire dépasse la limite)
| Causes possibles | Solutions |
|---|---|
Disposition du site inappropriée |
Ajustez la pose du robot pour éviter qu’il ne se déplace près de la singularité. |
Longue trajectoire linéaire avec un type de mouvement inapproprié |
Changez le Type de mouvement dans les Paramètres de déplacement de base des Étapes de type déplacement de Mouvement linéaire à Mouvement articulé. |
Lorsqu’il est nécessaire de conserver autant que possible le mouvement linéaire, activez Évitement de singularité dans les Paramètres de déplacement de base des Étapes de type déplacement. |
|
Paramétrage inapproprié des paramètres de détection de singularité |
Si le robot réel n’a pas atteint une singularité, vous pouvez aller au panneau Autres et ajuster les paramètres sous Détection de singularité pour éviter une détection excessive. Typiquement, vous pouvez définir la Méthode de détection de la Détection de singularité sur Détecter la vitesse de chaque articulation et augmenter la Vitesse maximale ou diminuer le Taux de réduction. |
Singularité du robot (impossibilité d’atteindre le point de passage cible en mouvement linéaire)
| Causes possibles | Solutions |
|---|---|
Disposition du site inappropriée |
Ajustez la pose du robot pour éviter qu’il ne se déplace près de la singularité. |
Lorsque le Type de point de passage est TCP ou Pose de l’objet cible, la singularité survient lors du mouvement linéaire |
Changez le Type de mouvement dans les Paramètres de déplacement de base des Étapes de type déplacement de Mouvement linéaire à Mouvement articulé. |
Lorsqu’il est nécessaire de conserver autant que possible le mouvement linéaire, activez Évitement de singularité dans les Paramètres de déplacement de base des Étapes de type déplacement. |
|
Lorsque le Type de point de passage est JPs, le mouvement linéaire entraîne la singularité |
Changez le Type de point de passage en TCP. |
Changez le Type de mouvement dans les Paramètres de déplacement de base des Étapes de type déplacement de Mouvement linéaire à Mouvement articulé. |
|
Lorsqu’il est nécessaire de conserver autant que possible le mouvement linéaire, activez Évitement de singularité dans les Paramètres de déplacement de base des Étapes de type déplacement. |
Singularité du robot (Approche de la région de singularité)
| Causes possibles | Solutions |
|---|---|
Disposition du site inappropriée |
Ajustez la pose du robot pour éviter qu’il ne se déplace près de la singularité. |
Lorsque le Type de point de passage est TCP ou Pose de l’objet cible, la singularité survient lors du mouvement linéaire |
Changez le Type de mouvement dans les Paramètres de déplacement de base des Étapes de type déplacement de Mouvement linéaire à Mouvement articulé. |
Lorsqu’il est nécessaire de conserver autant que possible le mouvement linéaire, activez Évitement de singularité dans les Paramètres de déplacement de base des Étapes de type déplacement. |
|
Paramétrage inapproprié des paramètres de détection de singularité |
Si le robot réel ne s’est pas approché d’une singularité, vous pouvez aller au panneau Autres et ajuster les paramètres sous Détection de singularité pour éviter une détection excessive. Typiquement, vous pouvez ajuster Sélectionner l’articulation et Limite inférieure/supérieure d’angle. |
Impossible d’éviter la singularité (La déviation de trajectoire dépasse la limite)
| Causes possibles | Solutions |
|---|---|
Seuils bas définis dans Évitement de singularité |
Dans les Paramètres de Évitement de singularité, augmentez de manière appropriée la Déviation maximale de position/d’angle. |
Impossible d’éviter la singularité |
Changez le Type de mouvement dans les Paramètres de déplacement de base des Étapes de type déplacement de Mouvement linéaire à Mouvement articulé. |
Nombre de segments insuffisant dans Évitement de singularité |
Dans les Paramètres de Évitement de singularité, si Limiter aux segments de mouvement est défini sur Nombre spécifique, vous pouvez augmenter de manière appropriée le Nombre de segments. |
Impossible d’éviter la singularité (Un point de passage inaccessible existe)
| Causes possibles | Solutions |
|---|---|
Disposition du site inappropriée |
Ajustez la pose du robot pour éviter qu’il ne se déplace près de la singularité. |
Impossible d’éviter la singularité |
Changez le Type de mouvement dans les Paramètres de déplacement de base des Étapes de type déplacement de Mouvement linéaire à Mouvement articulé. |
Collision
Reportez-vous à Dépanner les collisions en simulation pour plus d’informations.