Explication de la calibration main-œil pour robots portiques
Concepts associés
Robot portique
Le robot portique est un dispositif d’automatisation capable de réaliser un contrôle automatique. Il est reprogrammable sur la base du système de coordonnées cartésien XYZ dans l’espace, possède plusieurs degrés de liberté et convient à différentes tâches.
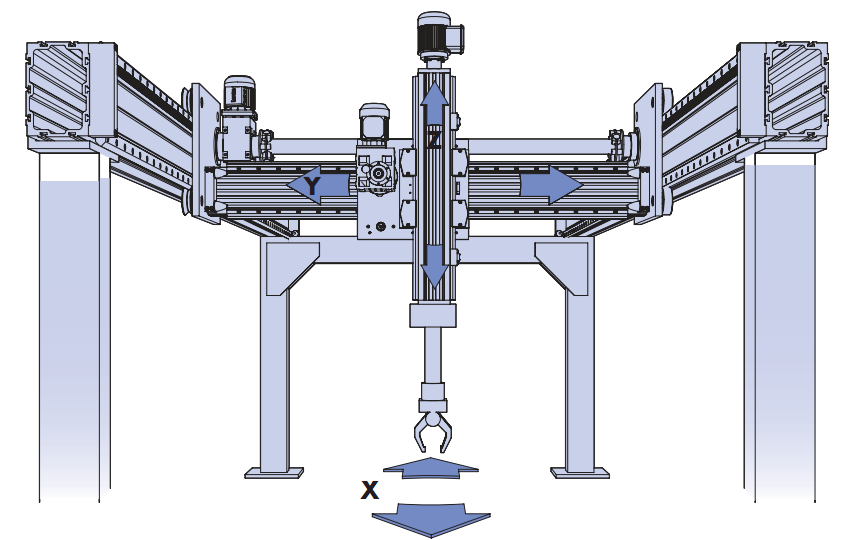
Degrés de liberté du robot portique
Le robot portique prend en charge des mouvements à multiples degrés de liberté, et l’angle spatial entre chaque degré de liberté est un angle droit.
Les robots portiques supportent généralement de 2 à 6 degrés de liberté, par exemple :
-
Les axes XYZ peuvent se déplacer linéairement (trois degrés de liberté)
-
Les axes XYZ peuvent se déplacer linéairement, et l’axe Z (appelé Rz ou axe C) peut tourner (quatre degrés de liberté)
-
Les axes XZ peuvent se déplacer linéairement (deux degrés de liberté)
-
Les axes XZ peuvent se déplacer linéairement, et l’axe Z peut tourner (trois degrés de liberté)
La caméra est généralement montée sur un certain axe du portique (par exemple l’axe Z ou C), et la position de balayage de la caméra sera affectée par le mouvement de cet axe. Par conséquent, dans la configuration de pré-calibration, vous devez spécifier quels mouvements d’axe affecteront la position de la caméra.
Systèmes de coordonnées de main gauche et de main droite
Le système de vision Mech-Mind utilise la pose de la bride du robot dans un système de coordonnées de main droite pour calculer les paramètres extrinsèques. Par conséquent, lors de l’utilisation d’un robot portique, vous devez déterminer si le système de coordonnées du portique est de main droite.
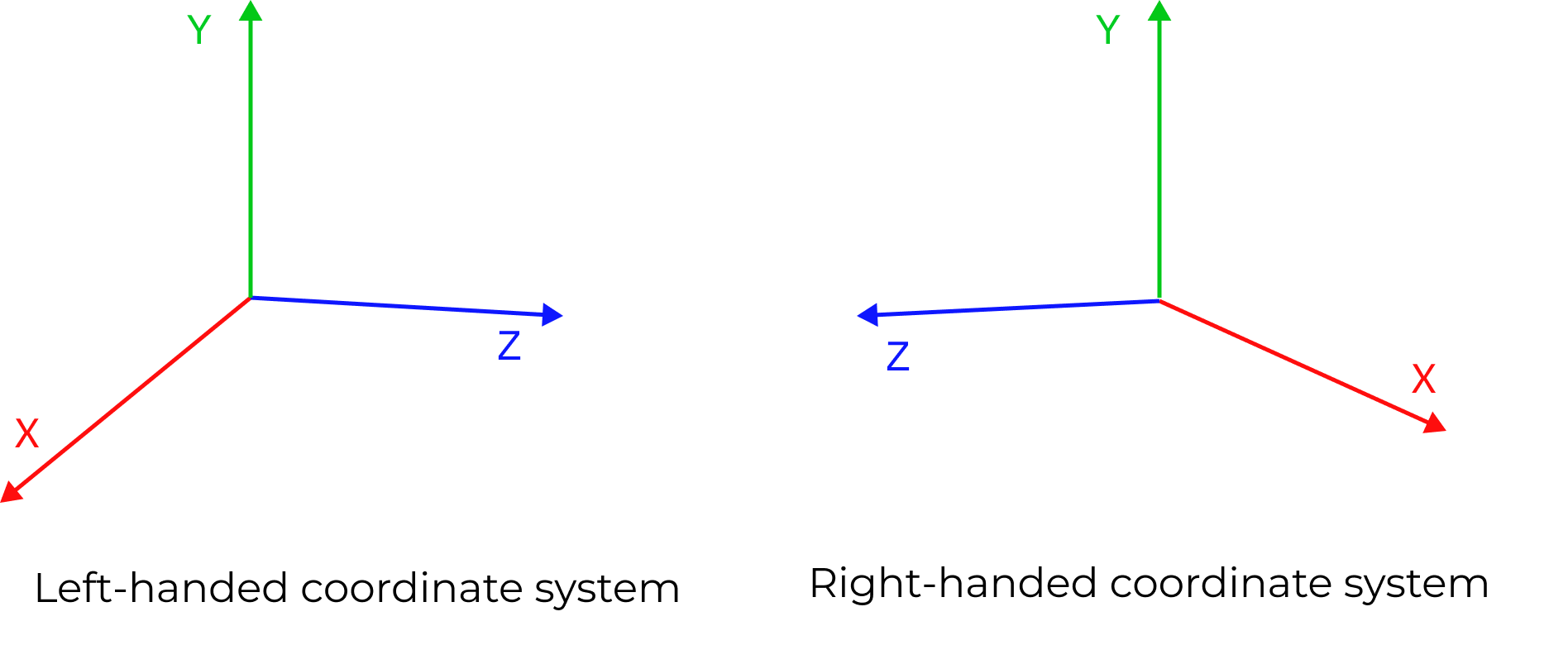
Les systèmes de coordonnées de main gauche et de main droite peuvent être déterminés comme suit :
-
Faites pointer le pouce de la main gauche vers la direction positive de l’axe X, et l’index vers la direction positive de l’axe Y. Si le majeur peut pointer vers la direction positive de l’axe Z, ce système de coordonnées est dit de main gauche (voir la figure de gauche ci-dessous).
-
Faites pointer le pouce de la main droite vers la direction positive de l’axe X, et l’index vers la direction positive de l’axe Y. Si le majeur peut pointer vers la direction positive de l’axe Z, ce système de coordonnées est dit de main droite (voir la figure de droite ci-dessous).
Lorsque le robot portique utilise un système de coordonnées de main gauche, il est recommandé de le convertir en système de main droite afin de faciliter la calibration et le traitement de vision ultérieurs. En général, vous devez inverser la direction positive du mouvement de l’encodeur pour l’un des axes XYZ sur un robot portique. De manière générale, il suffit d’inverser l’axe installé sur la base du portique, puis de sélectionner le système de coordonnées de main droite dans Mech-Vision pour la calibration.
Si vous pouvez effectuer cette modification sur le robot portique, il vous suffit de sélectionner le système de coordonnées de main gauche dans Mech-Vision, et le logiciel convertira automatiquement les données de pose en entrée et en sortie.
Principes de calibration
Pour un robot portique, la caméra est généralement montée sur un certain axe du robot, tel que l’axe Z, c’est-à-dire que la caméra est montée en mode eye in hand (EIH). La calibration du robot portique vise à déterminer la relation relative entre le repère de la caméra et le repère outil du robot.
Compte tenu des degrés de liberté limités et de l’espace d’activité restreint du robot portique, le logiciel Mech-Vision utilise la méthode de palpation du TCP pour collecter les données de calibration et établir la relation entre la plaque de calibration, la caméra et le robot. De plus, le processus de calibration du robot portique permet d’ajouter les poses de plusieurs plaques de calibration. Si, en raison des degrés de liberté limités, le robot portique ne peut pas toucher trois points sur une même plaque de calibration, vous pouvez utiliser plusieurs plaques et contrôler le robot portique pour toucher trois points (non alignés) sur plusieurs plaques de calibration.
Pour les principes de la calibration main-œil pour robots portiques, veuillez vous référer à la section Calibration main-œil en configuration EIH (palpation TCP).
Utilisation du fichier de paramètres extrinsèques
Le processus de calibration du robot portique génère un fichier de paramètres extrinsèques pour le point de calibration, et Mech-Vision calculera en temps réel les paramètres extrinsèques dynamiques en fonction de la pose du robot portique. Pour calculer les paramètres extrinsèques dynamiques dans les projets Mech-Vision, il est nécessaire d’utiliser les étapes Transformer les nuages de points pour portique et Transformer les poses pour portique afin de convertir les nuages de points/poses dans le repère de la caméra vers ceux dans le repère du robot portique.
Pendant l’exécution du projet, veuillez vous assurer que le robot portique peut communiquer normalement avec le système de vision Mech-Mind. De plus, le programme du robot doit fournir la pose de la bride du robot lors du déclenchement de l’exécution du projet Mech-Vision, afin que l’étape « Capture d’images depuis la caméra » puisse obtenir avec succès la pose de la bride du robot au moment de la capture des images.
|
Si le robot portique utilise un système de coordonnées de main gauche, le composant de communication convertit automatiquement les poses de la bride du robot envoyées par le programme du robot vers celles du système de coordonnées de main droite, puis les transmet à Mech-Vision pour le traitement de vision. Lorsque le résultat de vision est renvoyé, le composant de communication convertit d’abord automatiquement les poses dans le repère du robot portique produites par Mech-Vision en poses dans le système de coordonnées de main gauche, puis les renvoie au programme du robot. |