Définir DO
| À partir de la version 1.8.0, l’étape Liste Définir DO est fusionnée avec l’étape Définir DO pour former la nouvelle étape Définir DO. |
Fonction
Dans l’industrie de la robotique, DO signifie généralement sortie numérique. Les DO sont un type de signal électrique utilisé pour contrôler des dispositifs ou des composants dans un système d’automatisation. Ces signaux de sortie numérique sont représentés par un niveau de tension haut ou bas et sont utilisés pour activer ou désactiver les dispositifs ou actionneurs connectés. Ces dispositifs comprennent des ventouses, des moteurs, des électrovannes, des relais, des voyants lumineux et d’autres types de composants électriques.
Cette étape permet à des périphériques externes d’effectuer des actions spécifiques en envoyant des signaux, telles que l’ouverture et la fermeture des doigts du préhenseur, l’activation ou la désactivation des ventouses, et peut également être utilisée pour commander des convoyeurs ou déclencher des alarmes, etc.
Scénario d’application
-
Contrôler un préhenseur à vide multi-sections.
-
Envoyer des signaux au port DO spécifié.
Description des paramètres
Attendre un déplacement précis
Coché par défaut. Cette étape ne peut commencer à s’exécuter que lorsque le robot atteint le point de passage spécifique correspondant à l’étape de type déplacement avant l’étape Définir DO.
Paramètres de communication
Sélectionnez le destinataire du DO selon la situation réelle. Vous pouvez sélectionner à la fois Envoyer au robot et Envoyer à l’adaptateur.
Saisissez le Nom de l’adaptateur si Envoyer à l’adaptateur est sélectionné.
| Si les paramètres de communication ne sont pas configurés, le logiciel ne peut pas envoyer le DO au destinataire. |
Source
La source du DI peut être définie sur Déplacement par vision ou Personnalisé.
Déplacement par vision
Cette option s’applique uniquement aux scénarios de dépalettisation de cartons et d’outils multi-extrémités. Selon la configuration du préhenseur à vide de dépalettisation ou de l’outil multi-extrémités, ainsi que la méthode de prise correspondante, le logiciel calculera automatiquement les numéros de ports DO des extrémités d’outil qui doivent être activées.
Personnalisé
Spécifiez manuellement les ports DO à définir.
-
Veuillez suivre les étapes ci-dessous pour configurer.
-
Cliquez sur + pour ajouter des ports en fonction du nombre de ports à définir.
-
Définissez les numéros de ports et les valeurs pour contrôler les périphériques externes, et vous pouvez commenter la fonction du port courant.
-
Les numéros de port ne peuvent pas être dupliqués. La configuration ne peut pas être terminée avec des numéros de port en double.
-
Pour clarifier la fonction de chaque port, il est recommandé d’ajouter un commentaire pour chaque port.
-
Sélectionnez la ligne d’un port spécifique et cliquez sur - pour supprimer la configuration du port.
-
-
-
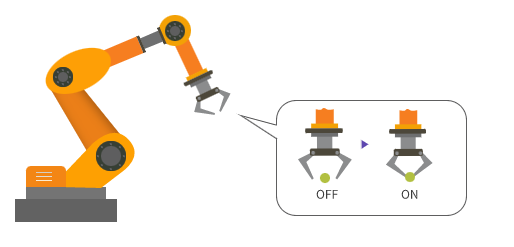
Exemple
Par exemple, si le Port 0 est utilisé pour contrôler le préhenseur, et que le préhenseur ouvre ses doigts lorsque la valeur du signal est 1, le paramétrage est illustré ci-dessous.
