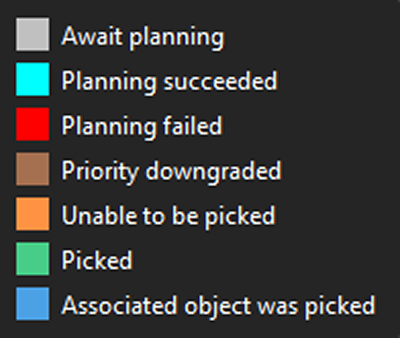
Détails du statut de pose
| Statut | Description |
|---|---|
En attente de planification |
Au moment de la consultation du statut, la pose n’a pas encore été utilisée pour la planification de trajectoire. Ou une Étape « Classify » a été ajoutée avant l’Étape « Vision Move ». En raison du filtrage par l’Étape « Classify », ce point de prise est exclu du cycle actuel de planification de trajectoire. |
Plan réussi |
Ce point de prise a été utilisé avec succès pour la planification de trajectoire. |
Échec de la planification |
Impossible de planifier une trajectoire avec ce point de prise. Veuillez consulter l’historique de planification pour la cause spécifique. |
Priorité rétrogradée |
La fonctionnalité Éviter de saisir le même objet cible est activée dans l’Étape « Vision Move ». Comme ce point de prise est trop proche d’un point de prise utilisé précédemment ou d’un objet cible déjà prélevé, sa priorité de prise a été rétrogradée. |
Impossible à prélever |
La cause d’un échec de prise peut varier. Veuillez consulter Causes d’impossibilité de prise. Pour voir la cause spécifique, vous pouvez également double-cliquer sur le nom du point de prise dans la zone de simulation 3D et vérifier la fenêtre Détails des résultats de vision qui s’affiche. |
Prélevé |
Ce point de prise a été utilisé avec succès pour prélever un objet cible. |
Objet associé prélevé |
L’objet cible associé à ce point de prise a déjà été prélevé. |
Causes d’impossibilité de prise
| Cause | Description | Solutions |
|---|---|---|
Informations d’objet cible incohérentes |
Le point de prise a été filtré par la fonctionnalité Filtrer le résultat de vision > Filtrer les poses de l’Étape « Vision Move ». |
Si vous souhaitez que ce point de prise soit inclus dans la planification de trajectoire, allez à l’Étape « Vision Move » correspondante pour modifier le paramètre Filtrer les poses et spécifier d’utiliser uniquement ce point de prise, l’objet cible correspondant ou l’étiquette. Si vous souhaitez inclure d’autres points de prise dans la planification de trajectoire, définissez Filtrer les poses sur Tout utiliser. |
Objet cible en double |
La fonction Éviter de saisir le même objet cible est activée dans l’Étape « Vision Move », et la fonction Conserver l’état de la dernière exécution est activée dans la barre d’outils. Par conséquent, le point de prise a été filtré car il est trop proche d’une pose de prise planifiée et enregistrée précédemment. |
Si vous souhaitez inclure ce point de prise dans la planification de trajectoire, rendez-vous à l’Étape « Vision Move » correspondante pour définir une valeur plus petite pour le Rayon d’abandon des tentatives sous Filtrer les points de prise improbables ; vous pouvez également désélectionner Filtrer les points de prise improbables. |
Aucun outil disponible |
L’outil utilisé pour la planification de trajectoire en cours ne correspond pas à ce point de prise. Veuillez consulter le journal pour connaître l’outil spécifique utilisé. |
Si vous souhaitez inclure le point de prise dans la planification de trajectoire, veuillez utiliser la Changer d’outil Étape pour le remplacer par un outil correspondant au point de prise. Si vous devez modifier la configuration de l’outil ou le point de prise, ouvrez l’éditeur d’objet cible, accédez à Définir le point de prise, et ajustez les paramètres sous Configuration de la prise. |
Échec de l’analyse |
Il existe quatre causes principales possibles de l’échec : 1. L’ID de l’objet cible correspondant au point de prise n’est pas trouvé dans la liste des objets cibles. 2. L’analyse de la pose a échoué. 3. Le nom du point de prise correspondant n’est pas trouvé dans l’éditeur d’objet cible. 4. Le nom de l’objet cible correspondant au point de prise n’est pas trouvé dans l’éditeur d’objet cible. Veuillez consulter le journal pour la cause spécifique de l’échec. |
Si un projet de vision est appelé, vérifiez si les paramètres de l’Étape « Sortie » dans le projet de vision sont corrects. Si des enregistrements de vision sont utilisés pour la simulation, assurez-vous que leur format est correct. Vous pouvez supprimer les enregistrements de vision incorrects ou relancer le projet de vision pour obtenir des résultats de vision au format correct. |
Hors du bac |
La fonctionnalité Filtrer le résultat de vision > Le résultat doit être dans le bac spécifié de l’Étape « Vision Move » est activée. Le point de prise est filtré car il est en dehors du bac spécifié. |
Si la pose correspondante est incorrecte, vérifiez et modifiez le projet de vision pour fournir la pose correcte. Si la sélection du bac est erronée, veuillez aller à l’Étape « Vision Move » correspondante, et sélectionnez le bac correct dans les paramètres Filtrer le résultat de vision > Le résultat doit être dans un bac spécifique. Si vous n’avez pas besoin que le résultat de vision soit dans un bac spécifique, veuillez effacer votre sélection dans les paramètres Filtrer le résultat de vision > Le résultat doit être dans un bac spécifique. |
Échec de la correction de pose |
En raison des limites de la configuration du robot, la direction de l’axe Z du point de prise doit être alignée sur la direction de l’axe Z du repère du robot. L’écart de posture du point de prise est trop important, ce qui entraîne un échec de la correction de la pose, et il ne peut donc pas être utilisé pour la prise. |
Si la pose ne peut pas être corrigée, assurez-vous que les matériaux entrants sont conformes aux normes. Si les matériaux entrants ont été standardisés, utilisez les Étapes d’ajustement de pose dans le projet de vision pour corriger la pose. |
Point de prise non spécifié |
Actuellement, des enregistrements de vision sont utilisés pour la simulation, avec l’option n’utiliser que la pose avec l’index spécifié activée lors de la sélection de l’enregistrement de vision. Le point de prise ne peut pas être utilisé pour la prise car il n’a pas été spécifié. |
Si vous souhaitez inclure ce point de prise dans la planification de trajectoire, désactivez la fonctionnalité n’utiliser que la pose avec l’index spécifié lors de la sélection de l’enregistrement de vision. |
Échec de la dépalettisation |
La Méthode de prise dans l’Étape « Vision Move » est définie sur Dépalettisation de boîtes. La prise a échoué parce que la boîte correspondant au point de prise est entourée par d’autres boîtes. |
Aucune solution disponible pour le moment. |