Composer de nouvelles poses en combinant des parties de poses d’entrée
Fonction
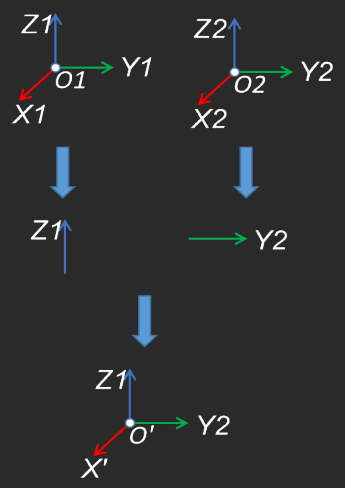
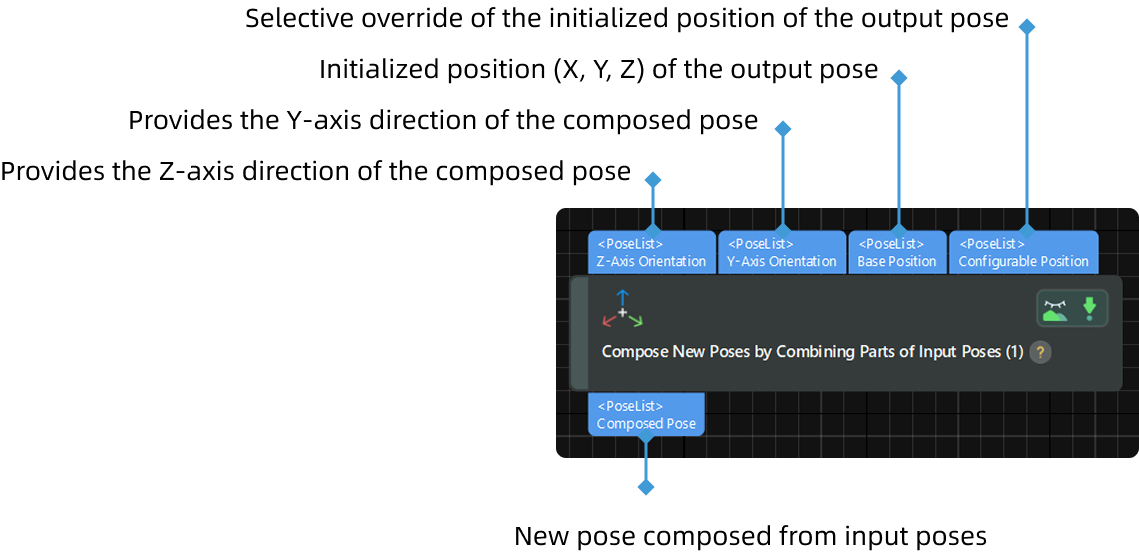
Cette étape sert à combiner les parties spécifiées des poses d’entrée en une nouvelle pose, en prenant en charge une sélection flexible des axes et une synthèse directionnelle.
Description des paramètres
Paramètres de visualisation
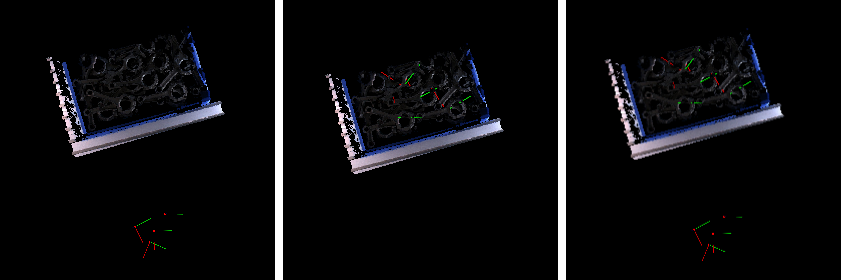
- Type de pose à visualiser
-
Description: Ce paramètre est utilisé pour sélectionner le type de pose à visualiser.
Valeur par défaut: After
Liste des valeurs: After, Before, et All
Instructions: Sélectionnez une option appropriée selon les besoins réels. Veuillez consulter exemple de réglage pour le résultat correspondant.
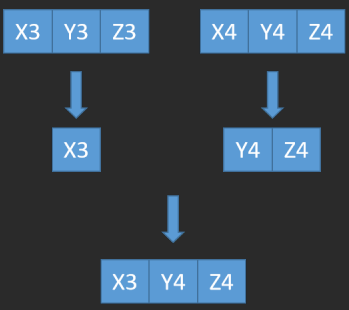
Axes de la quatrième pose d’entrée à utiliser
Description : Ce paramètre permet de spécifier quels axes de position de la quatrième pose d’entrée sont utilisés pour contrôler l’influence de l’entrée de position configurable sur la position de base.
Valeur par défaut : X
Liste de valeurs : X, Y, Z, XY, XZ, YZ, XYZ et None
Instructions : En fonction de la valeur sélectionnée, les coordonnées correspondantes de la position configurable remplaceront les coordonnées respectives de la position de base. Par exemple, si la valeur du paramètre est réglée sur X, seule la coordonnée X de la position configurable remplacera la coordonnée X de la position de base, tandis que les coordonnées Y et Z restent inchangées. Si None est sélectionné, l’entrée de position configurable sera complètement ignorée et seules les coordonnées de la position de base seront utilisées.