Les points de prise sont-ils épuisés
Fonction
Vérifie si tous les points de prise du résultat de vision reçu par l’étape « Déplacement de vision » sélectionnée ont été utilisés.
| Cette étape ne prend effet que lorsque le paramètre Réutiliser le résultat de vision ou Réutiliser le résultat de vision de l’étape « Déplacement de vision » est sélectionné. |
Scénario d’utilisation
Lorsque le résultat de vision de l’étape « Déplacement de vision » contient plusieurs poses préhensibles, le logiciel guidera le robot avec ces poses pour prélever jusqu’à ce que les poses préhensibles soient épuisées.
Lorsque les poses du résultat de vision sont épuisées, la caméra capturera de nouveau une image. Pour les scénarios ayant une forte exigence sur le takt time, la réutilisation du résultat de vision peut réduire le temps de traitement de la vision et raccourcir le takt time.
Description des paramètres
Port de sortie pour la pré-planification
Afin de rendre continu le processus de planification de trajectoire dans l’application réelle, le logiciel exécutera au préalable une pré-planification en arrière-plan. Spécifier un port de sortie de pré-planification le long duquel le projet est le plus susceptible de se poursuivre peut réduire la probabilité de replanification et le temps d’attente du robot.
| -1 |
Ne pas spécifier de port de sortie pour la pré-planification. |
| 0 |
Le projet empruntera le port de sortie Non épuisé pendant la pré-planification. |
| 1 |
Le projet empruntera le port de sortie Épuisé pendant la pré-planification. |
Exemple d’application
Dans une tâche de dépalletisation, la caméra capture généralement une image par couche, et le résultat de vision correspondant sera utilisé pour prélever tous les cartons sur la même couche. L’étape Les points de prise sont-ils épuisés peut être utilisée pour déterminer si tous les cartons sur la même couche ont été prélevés. L’exemple est montré ci-dessous.
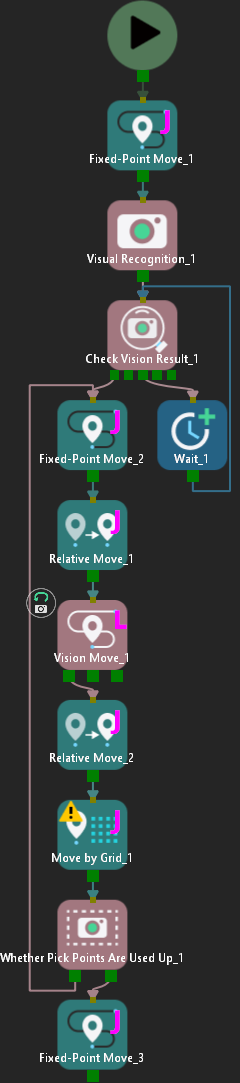
-
Si les points de prise ne sont pas épuisés, le robot prélèvera de manière répétée.
-
Si les points de prise sont épuisés, le port de sortie Épuisé sera emprunté.