Configurer la communication de l’Adapter
Cette section présente la manière de configurer la communication de l’Adapter. Avant la configuration, veuillez confirmer que vous avez déjà sélectionné le robot et que vous êtes entré dans l’interface de configuration de la communication.
-
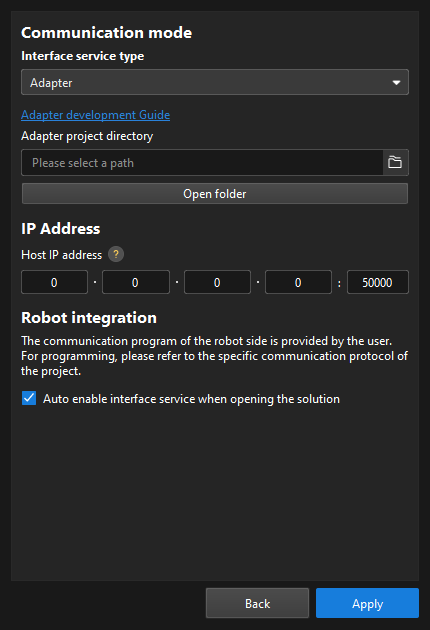
Dans la section Mode de communication, définissez le paramètre « Type de service d’interface » sur Adapter.
-
Cliquez sur
 et sélectionnez le dossier du projet Adapter.
et sélectionnez le dossier du projet Adapter.Il est nécessaire d’écrire d’abord le programme Adapter. Pour plus de détails, reportez-vous au Guide de programmation de l’Adapter.
-
Dans la section Adresse IP, saisissez l’adresse IP et le numéro de port de l’hôte.
-
L’adresse IP de l’hôte et l’adresse IP du robot doivent être sur le même sous-réseau.
-
Le numéro de port doit être réglé à 50000 ou plus.
-
-
(Facultatif) Sélectionnez Activer automatiquement le service d’interface lors de l’ouverture de la solution. Lorsque la solution est ouverte, vous n’avez pas besoin de démarrer le service d’interface manuellement.
-
Cliquez sur le bouton Appliquer.
Ensuite, vous devez écrire le programme de communication côté robot en vous référant au Manuel de développement de l’interface standard et le charger sur le robot.