Vérification et analyse des résultats de la calibration main-œil
Pour les paramètres extrinsèques calibrés, vous devez vérifier si la précision de calibration répond aux exigences. Si l’erreur sort de la plage normale, vous devez diagnostiquer et résoudre les problèmes responsables de l’erreur avant de recalibrer afin d’obtenir des paramètres extrinsèques conformes.
Valider les résultats de calibration
Cette section présente quatre méthodes rapides pour valider les résultats de calibration.
| Méthode de validation | Scénarios d’application | Remarque |
|---|---|---|
Scénarios avec des exigences de précision faibles |
Pour une validation approximative des résultats de calibration |
|
Scénarios avec des exigences de précision faibles |
Pour une validation approximative des résultats de calibration |
|
Vérifier le décalage du nuage de points de la plaque de calibration par rapport à un point fixe |
Scénarios avec des exigences de précision faibles |
Pour une validation approximative des résultats de calibration |
Scénarios avec des exigences de haute précision |
Pour une validation complète et quantitative des résultats de calibration |
Afficher le nuage de points d’erreur dans la visionneuse de nuages de points
Après le calcul des paramètres extrinsèques de la caméra, veuillez effectuer l’opération suivante :
-
À l’étape Calculer les paramètres extrinsèques, affichez le nuage de points d’erreur dans le panneau droit Visualiseur de nuage de points une fois le calcul de la calibration terminé.
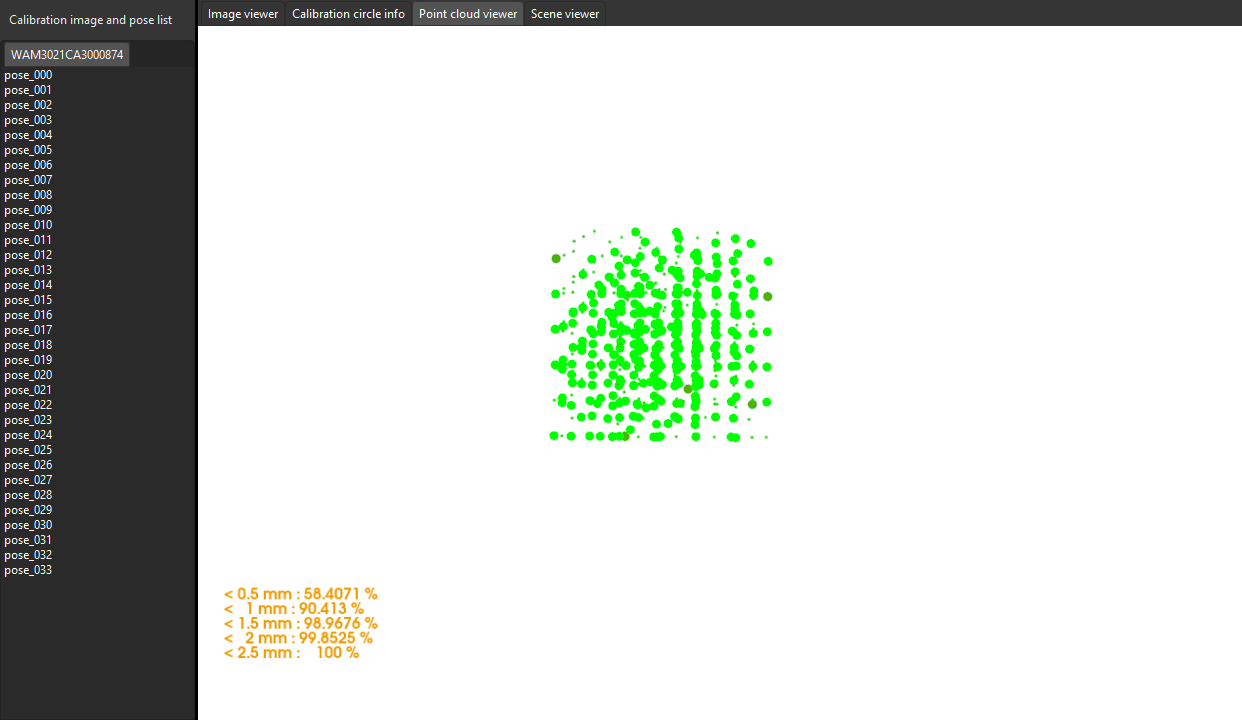
Le nuage de points d’erreur montre l’écart entre la valeur calculée et la valeur réelle des cercles sur la plaque de calibration à chaque point de calibration. Pour la description détaillée, veuillez consulter Description du nuage de points d’erreur. -
Confirmez que l’erreur de précision de calibration répond aux exigences du projet. Recherchez la valeur d’erreur avec un pourcentage de 100 % pour obtenir une précision de calibration approximative.
La vue du nuage de points après calibration à l’aide de poses aléatoires multiples de la plaque de calibration est illustrée ci-dessous. L’erreur de calibration est comprise dans ±2.5 mm.
|
En général, les normes d’erreur de calibration acceptables dans le nuage de points sont les suivantes :
Les normes ci-dessus sont fournies à titre de référence. Veuillez suivre l’exigence de précision spécifique de l’application réelle. |
La couleur du point représente le niveau d’erreur. Plus la couleur est sombre, plus l’erreur du point est grande.
Pour visualiser les points à chaque niveau d’erreur, appuyez sur les touches numériques 0–9 dans le panneau Visionneuse de nuages de points. Les points dont l’erreur correspond au niveau spécifié seront mis en surbrillance.
En prenant un niveau d’erreur de 0.5 mm comme exemple, la touche 0 correspond aux points avec une erreur inférieure à 0.5 mm, la touche 1 correspond aux points avec une erreur entre 0.5 mm et 1 mm, et ainsi de suite.
La figure suivante affiche tous les points avec une erreur inférieure à ±0.5 mm (en appuyant sur la touche numérique 0).
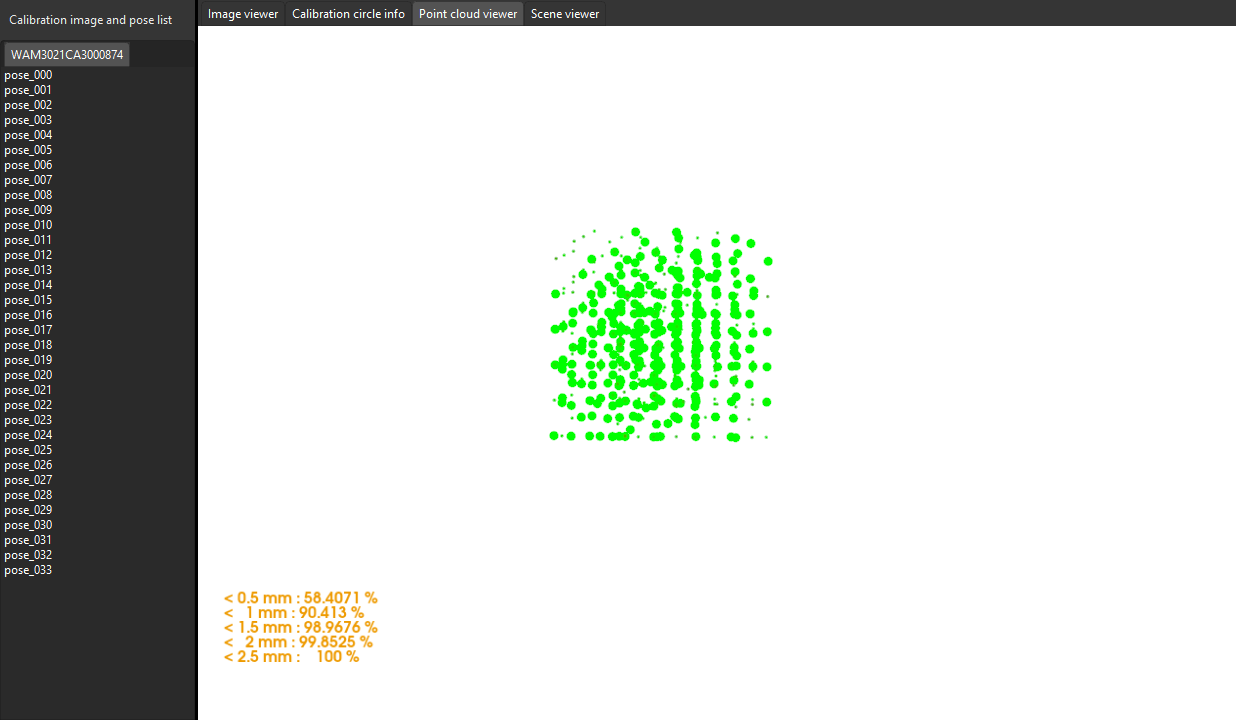
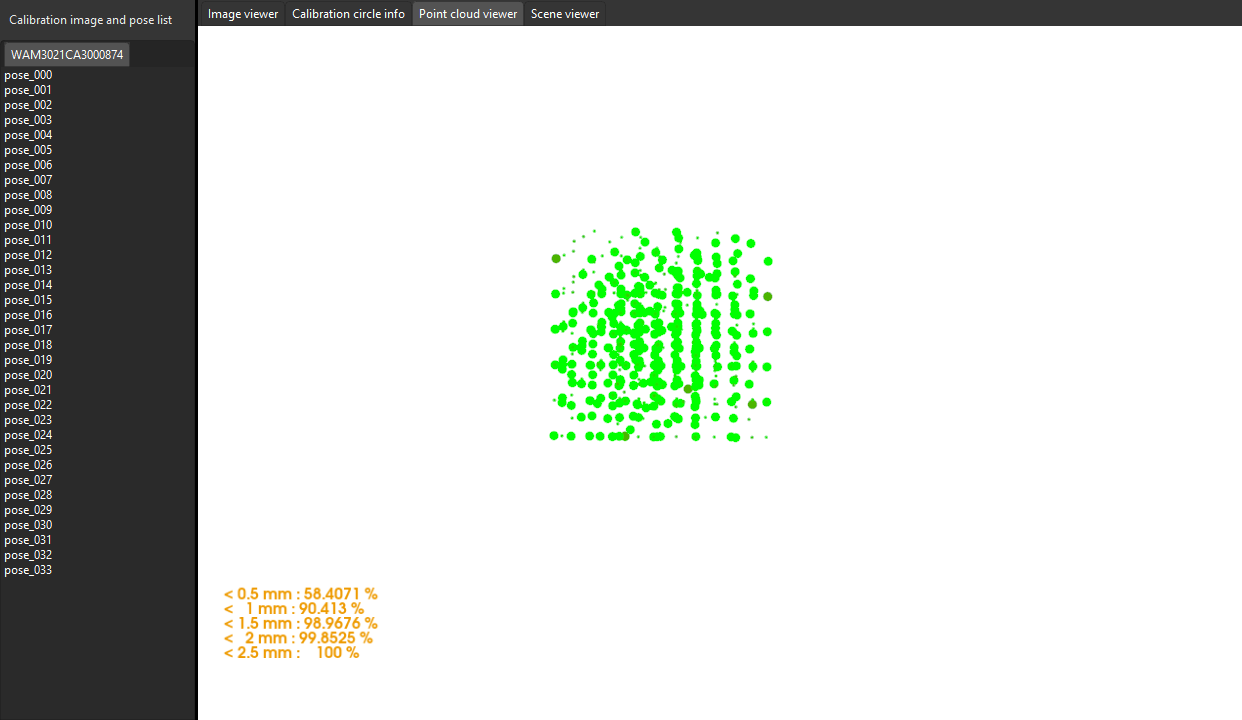
La figure suivante affiche tous les points avec une erreur entre 2.0 mm et 2.5 mm (en appuyant sur la touche numérique 4).
Vérifier grossièrement le degré de coïncidence entre le nuage de points du robot et le modèle du robot dans la visionneuse de scène
| Cette méthode de validation s’applique aux scénarios de calibration dans les configurations ETH et EIH. Pour la calibration en configuration ETH, la caméra doit capturer le nuage de points du bras du robot. Pour la calibration en configuration EIH, la caméra doit capturer le nuage de points de la base du robot. Dans le scénario EIH, les degrés de liberté et l’espace de travail du robot doivent permettre à son extrémité d’approcher la base, ce qui permet à la caméra de capturer des images de la base. |
Calibration main-œil en configuration ETH :
Après le calcul des paramètres extrinsèques de la caméra, veuillez effectuer l’opération suivante :
-
Après la calibration, déplacez les bras du robot dans le champ de vision de la caméra.
-
À l’étape Calculer les paramètres extrinsèques, cliquez sur le bouton Capturer par la caméra dans la zone 2 Outil auxiliaire. Cette opération déclenche la capture d’images par la caméra.
-
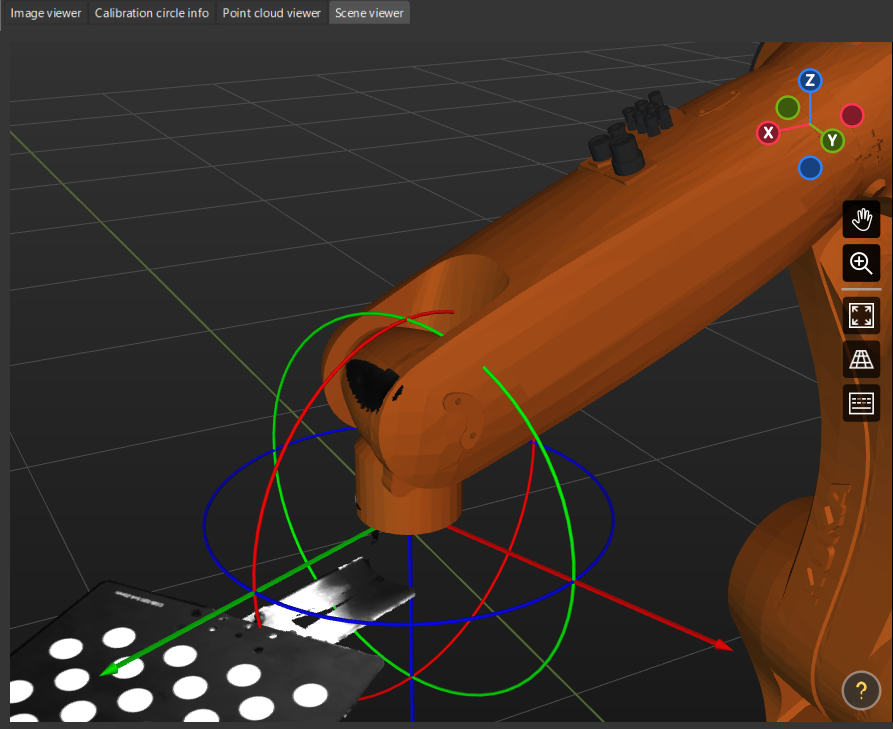
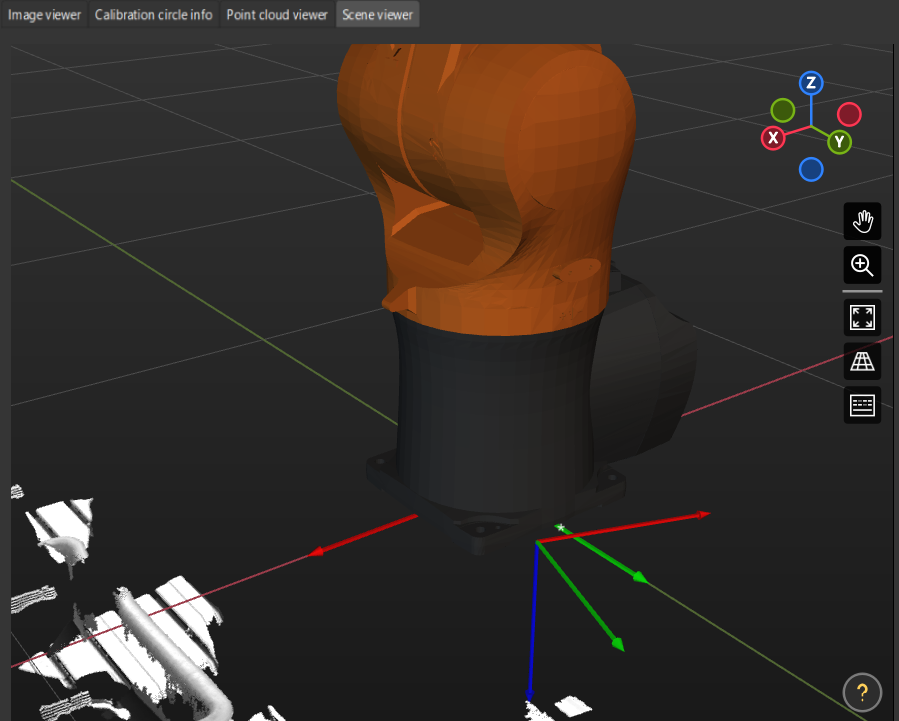
Dans le panneau droit Visionneuse de scène, vérifiez visuellement le degré de coïncidence entre le nuage de points du robot réel et le modèle du robot. Si le nuage de points du robot coïncide approximativement avec le modèle du robot, la calibration est réussie.
Comme illustré, la partie colorée est le modèle du robot, la partie noire est le nuage de points du robot. On observe que le modèle du robot et le nuage de points du robot coïncident approximativement. Cela indique que le résultat de calibration peut être utilisé.
Calibration main-œil en configuration EIH :
Après le calcul des paramètres extrinsèques de la caméra, veuillez effectuer l’opération suivante:
-
Déplacez l’effecteur terminal du robot vers une position où la caméra peut capturer des images de la base.
-
À l’étape Calculer les paramètres extrinsèques, cliquez sur le bouton Capture par la caméra dans la zone 2 Outils auxiliaires. Cette opération déclenche la capture d’images par la caméra.
-
Dans le panneau de droite Visionneuse de scène, vérifiez visuellement le degré de coïncidence entre le nuage de points du robot réel et le modèle du robot. Si le nuage de points du robot coïncide approximativement avec le modèle du robot, l’étalonnage est réussi.
Comme illustré sur la figure, la partie colorée est le modèle du robot, la partie noire est le nuage de points du robot. D’après la figure, on constate que le modèle du robot et le nuage de points du robot coïncident approximativement. Cela indique que le résultat d’étalonnage est exploitable.
|
Vérifier le décalage du nuage de points de la plaque de calibration par rapport à un point fixe dans la visionneuse de scène
| Si la caméra ne peut pas capturer une image de la base en raison des degrés de liberté du robot ou de limitations d’espace de travail dans la configuration EIH, vous pouvez utiliser cette méthode pour valider grossièrement les résultats de calibration. |
Après avoir calculé les paramètres extrinsèques de la caméra, effectuez les opérations suivantes :
-
Placez la plaque de calibration à une position fixe.
-
Ouvrez Mech-Viz, ajoutez un point fixe, et assurez-vous que ce point coïncide avec le réticule d’un cercle de calibration sur la plaque de calibration.
-
Dans la bibliothèque d’Étapes, trouvez l’étape « Déplacement du point fixe » puis faites-la glisser dans l’espace de travail de programmation graphique.
-
Sélectionnez cette Étape, définissez le paramètre Type de point de passage sur « Pose de l’objet cible » dans le panneau des paramètres, ajustez les valeurs X, Y et Z de la pose pour que ce point coïncide avec le réticule d’un cercle de calibration sur la plaque de calibration.
-
-
Contrôlez le robot pour changer la pose de la caméra plusieurs fois, et cliquez sur le bouton Recalculer les paramètres extrinsèques dans l’étape Calculer les paramètres de la caméra du processus de calibration. Cette opération déclenche la capture d’images par la caméra.
-
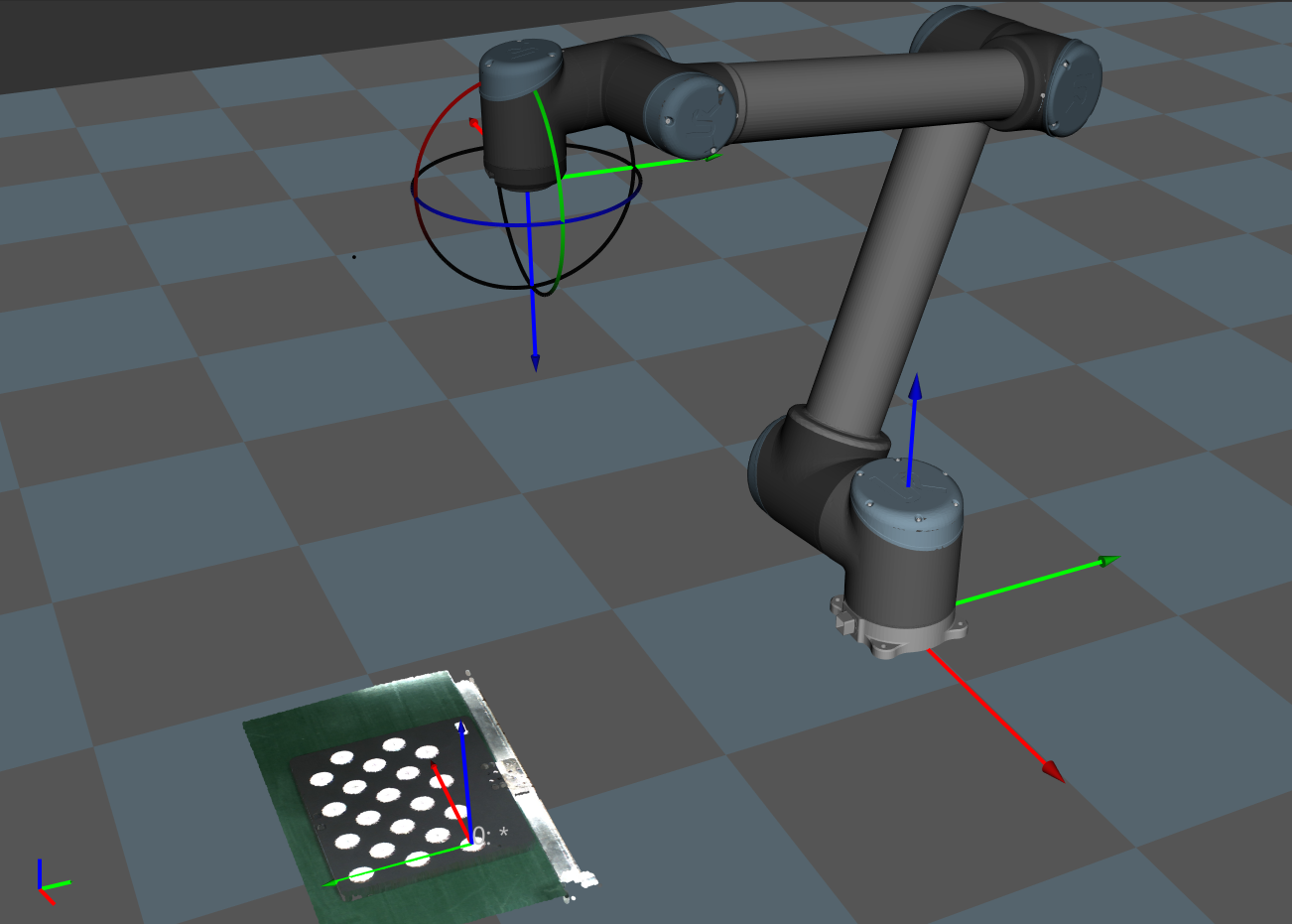
Vérifiez si le nuage de points de la plaque de calibration présente un décalage significatif par rapport au point fixe dans la Visionneuse de scène.
Si le nuage de points de la plaque de calibration n’a pas de décalage significatif, la calibration est réussie.
|
Utiliser l’outil de validation de la précision des paramètres extrinsèques pour valider les paramètres extrinsèques
Mech-Vision fournit l’outil de validation de la précision des paramètres extrinsèques pour analyser les erreurs des paramètres extrinsèques dans les configurations Eye-to-Hand (ETH) et Eye-in-Hand (EIH). L’analyse des erreurs couvre la vérification des erreurs des paramètres extrinsèques et des erreurs de précision absolue du robot.
À l’étape Calculer les paramètres extrinsèques, cliquez sur Précision des paramètres extrinsèques pour ouvrir l’outil. Veuillez suivre les instructions de l’outil pour valider la précision des paramètres extrinsèques et générer le rapport d’évaluation final.
Vous pouvez également ouvrir l’outil en sélectionnant dans la barre de menus.
Pour plus de détails, veuillez vous référer à Analyser les erreurs des paramètres extrinsèques.
Analyser les résultats de calibration
Vérifier le rapport de calibration des paramètres extrinsèques
Pour la calibration automatique et la calibration manuelle utilisant la méthode des poses aléatoires multiples de la plaque de calibration pour les robots à six axes, l’outil de calibration de caméra de Mech-Vision fournit la fonction « rapport de calibration des paramètres extrinsèques ».
Dans l’étape Calculer les paramètres extrinsèques du processus de calibration, après avoir obtenu les paramètres extrinsèques en cliquant sur le bouton Calculer les paramètres extrinsèques, vous pouvez cliquer sur le bouton Afficher le rapport de calibration des paramètres extrinsèques.
L’outil de calibration de caméra de Mech-Vision vérifiera les résultats de calibration des paramètres extrinsèques sur la base des données de calibration collectées et générera le rapport de calibration des paramètres extrinsèques.
Ce rapport affiche les résultats des vérifications suivantes ainsi que des recommandations d’amélioration :
-
Vérification de la convention des angles d’Euler
-
Vérification de la précision absolue du robot
Si la précision de la caméra dans le rapport ne répond pas aux exigences, veuillez suivre les recommandations pour résoudre les erreurs de précision de la caméra.
Améliorer la précision des paramètres extrinsèques
Si la précision des données de paramètres extrinsèques calibrées est inférieure aux normes, vous devez suivre les instructions suivantes pour inspecter les données et trouver la cause profonde des erreurs.
Inspecter les données de calibration
Veuillez vérifier les données de calibration dans l’ordre suivant pour localiser la cause profonde.
Les données de calibration font référence aux données de point de calibration générées durant le processus de calibration et sont stockées dans calib_data.json. Ce fichier enregistre des données telles que les poses de la bride aux points de calibration et les données de cercle de calibration.
Pour inspecter les données de calibration, suivez ces étapes :
-
Ouvrez Mech-Vision, et cliquez sur le bouton Calibration de la caméra dans la barre d’outils. La fenêtre Configuration avant la calibration sera affichée.
-
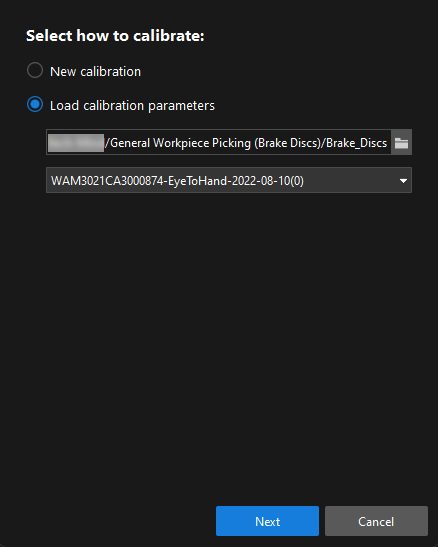
Dans la fenêtre Sélectionner la méthode de calibration, sélectionnez le bouton radio Charger les paramètres de calibration, choisissez le fichier de paramètres de calibration, puis cliquez sur le bouton Suivant.
Lors de la sélection du chemin du fichier de paramètres de calibration, choisissez le chemin vers le dossier contenant le fichier de paramètres de calibration.
-
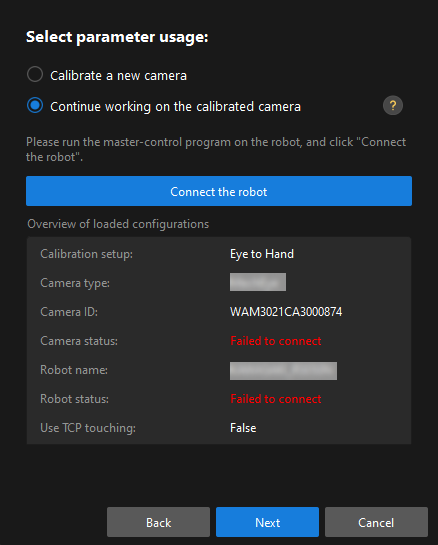
Dans la fenêtre Sélectionner l’utilisation des paramètres, sélectionnez le bouton radio Continuer à travailler sur la caméra calibrée, puis cliquez sur le bouton Suivant.
-
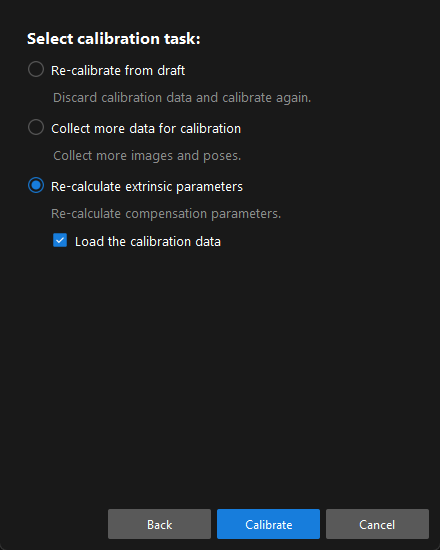
Dans la fenêtre Sélectionner la tâche de calibration, sélectionnez le bouton radio Recalculer les paramètres extrinsèques, cochez la case Charger les données de calibration, puis cliquez sur le bouton Calibrer.
-
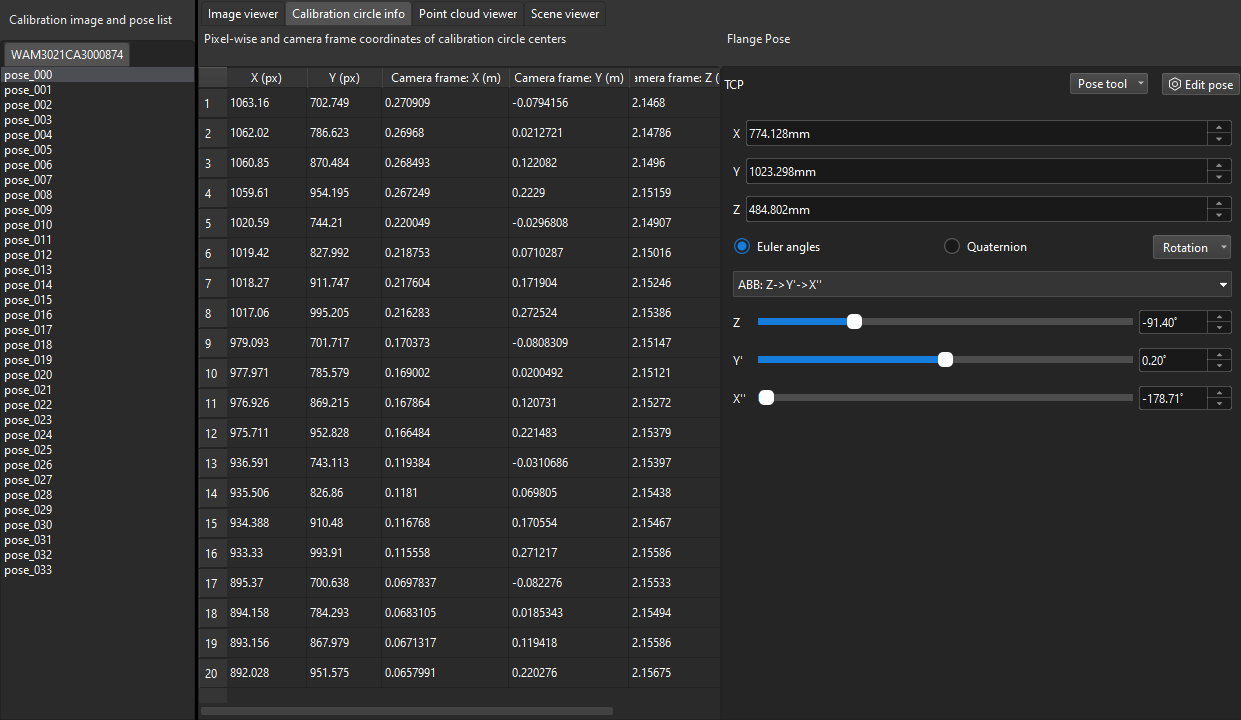
À l’étape Calibrer les paramètres extrinsèques du processus de calibration, cliquez sur un point de calibration dans le panneau Liste des images et poses de calibration (par exemple pose_000), puis cliquez sur l’onglet Infos du cercle de calibration pour voir la pose de la bride du robot et les données du cercle de calibration à ce point de calibration.
|
Dans la figure, les colonnes X (pixel) et Y (pixel) représentent les coordonnées en pixels des centres des cercles de calibration dans l’image 2D actuelle. Repère caméra: les colonnes X(m)/Y(m)/Z(m) représentent les coordonnées des centres des cercles de calibration dans le repère de la caméra dans la carte de profondeur actuelle. |
Veuillez inspecter les données de calibration sous les aspects suivants :
-
Vérifiez si les poses de la bride changent entre différents ensembles de points de calibration dans le chemin de calibration pyramidal.
Seuls les points de calibration du chemin de calibration pyramidal sont vérifiés, à l’exclusion des ensembles de points de calibration de rotation. Cette vérification s’applique aux scénarios de calibration utilisant la méthode des poses aléatoires multiples de la plaque de calibration pour collecter les données de calibration. Dans le panneau Liste des images et poses de calibration, sélectionnez les points de calibration un par un (par exemple pose_000), puis cliquez sur l’onglet Infos du cercle de calibration pour voir la pose de la bride du robot au point de calibration. Lorsque le robot se déplace le long du chemin de calibration pyramidal, il se déplace selon son repère de base ou sa bride sans rotation. Par conséquent, les angles d’Euler restent constants tout au long de la procédure.
Selon le niveau de précision du robot, les angles d’Euler peuvent fluctuer différemment. Si la fluctuation dépasse 1 degré, le robot peut avoir perdu sa position zéro ou présenter une mauvaise précision.
Solution : dans ce cas, la calibration main-œil ne doit pas être poursuivie. Vous devez vérifier la position zéro du robot et corriger le problème de précision avant de continuer la calibration.
-
Vérifiez si l’« Erreur de l’intervalle moyen mesuré entre les cercles de calibration » des points de calibration dépasse la valeur standard.
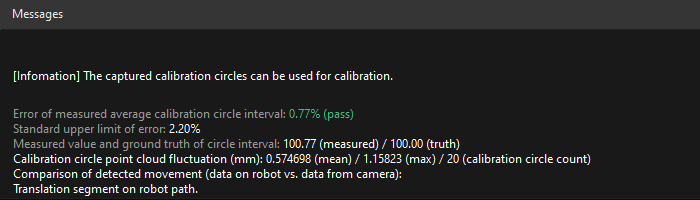
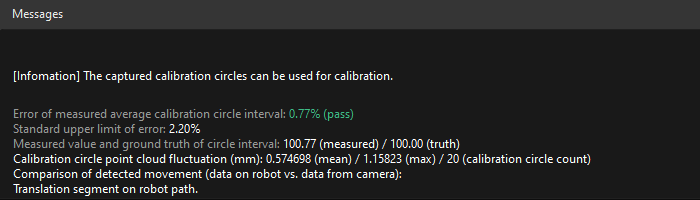
Dans le panneau Liste des images et poses de calibration, sélectionnez le point de calibration, et consultez « Erreur de l’intervalle moyen mesuré entre les cercles de calibration » dans le panneau Messages.
S’il dépasse la valeur standard, le point de calibration passera au jaune pour avertissement. En tant qu’élément du résultat de vérification des paramètres intrinsèques, Erreur de l’intervalle moyen mesuré entre les cercles de calibration peut refléter partiellement l’erreur actuelle des paramètres intrinsèques de la caméra.
Solution : pour les projets avec des exigences de faible précision, des paramètres intrinsèques dont les erreurs dépassent légèrement la norme peuvent encore être utilisés. Pour les situations où une haute précision est requise ou lorsque les erreurs dépassent largement la norme, il est recommandé de recalibrer les paramètres intrinsèques ou de remplacer la caméra.
-
Vérifiez si la valeur maximale de la « fluctuation du nuage de points des cercles de calibration » dépasse 3 mm
Dans le panneau Liste des images et poses de calibration, sélectionnez le point de calibration, et consultez Fluctuation du nuage de points des cercles de calibration dans le panneau Messages. Fluctuation du nuage de points des cercles de calibration représente la fluctuation globale du plan contenant les coordonnées de tous les centres des cercles de calibration. Cette valeur influence directement la précision des paramètres extrinsèques. Plus les exigences de précision d’un projet sont élevées, plus la valeur de fluctuation doit être faible.
Généralement, la valeur maximale acceptable pour la fluctuation est de 3 mm. Si plus de trois points de calibration présentent une fluctuation du nuage de points supérieure à 3 mm, l’ensemble de la précision n’est pas acceptable. Vous devez diagnostiquer le problème et effectuer une recalibration.
Les facteurs potentiels pouvant provoquer une fluctuation du nuage de points sont les suivants :
Cause possible 1 : Les fonctions Lissage de surface et Suppression des valeurs aberrantes dans Mech-Eye Viewer n’ont pas été activées, ou le Gain est appliqué.
Solution : Réglez Lissage de surface et Suppression des valeurs aberrantes sur « Normal » et définissez Gain à zéro. Si le problème persiste après avoir effectué les étapes ci-dessus, un ombrage doit être appliqué sur le site.
Cause possible 2 : Lorsqu’une calibration automatique est effectuée en configuration ETH, la plaque de calibration n’est pas fixée solidement sur la bride du robot. Si le robot est trop rapide, la plaque de calibration peut vibrer durant le processus de calibration, provoquant ainsi une fluctuation excessive du nuage de points.
Solution : Réduisez la limite de vitesse du robot, fixez fermement la plaque de calibration, et augmentez le temps d’attente avant de capturer une nouvelle image à chaque point de passage.