Description des paramètres du niveau de réglage avancé
Cette section présente les paramètres configurables disponibles au niveau de réglage avancé pour l’étape « 3D Matching », ainsi que la description des fonctions et les recommandations de réglage de chaque paramètre.
Paramètres d’entrée et de sortie
- Type de sortie
-
Description: Ce paramètre permet de définir le type d’information produit par l’étape. Vous pouvez choisir de sortir des informations sur le point de prise ou sur le point central de l’objet.
Liste des valeurs: Point de prise, Point central de l’objet
-
Point de prise: Sort le point de prise et les informations de point de prise de l’objet cible.
-
Point central de l’objet: Sort le point central de l’objet.
Valeur par défaut: Point de prise
-
- Type d’entrée
-
Description: Ce paramètre est utilisé pour définir s’il faut entrer le modèle de nuage de points.
Liste des valeurs: Par défaut, Modèle externe
-
Par défaut: Utilisez le modèle de nuage de points créé dans l’éditeur d’objet cible pour l’appariement.
-
Modèle externe: Une fois cette option sélectionnée, des ports d’entrée supplémentaires seront ajoutés à l’étape pour l’entrée du modèle de nuage de points et du point central de l’objet cible. Si vous souhaitez sélectionner cette option, veuillez sélectionner le workflow « Aucun modèle de nuage de points requis » dans l’éditeur d’objet cible. Pour les scénarios applicables à cette option, consultez Reconnaître des objets cibles avec des modèles de nuage de points externes.
Valeur par défaut: Par défaut
-
Mode d’appariement
| Matching Mode ne peut être défini que lorsque le modèle de nuage de points de l’objet cible sélectionné contient à la fois des nuages de points de surface et de bord. Si le modèle de nuage de points ne contient qu’un seul type de nuage de points, le mode d’appariement correspondant sera automatiquement appliqué dans cette étape, et la commutation manuelle n’est pas autorisée. Par exemple, lorsque le modèle de nuage de points ne contient que des nuages de points de bord, le mode d’appariement de bord sera utilisé par défaut, et les paramètres liés au Matching Mode seront masqués. |
- Définir automatiquement le mode d’appariement
-
Description: Une fois cette option activée, les Mode d’appariement grossier et Mode d’appariement fin seront définis automatiquement.
Valeur par défaut: Vrai
- Mode d’appariement grossier/fin
-
Description: Les deux paramètres sont utilisés pour définir le mode d’appariement. Vous n’avez besoin de les définir que lorsque Définir automatiquement le mode d’appariement n’est pas activé.
Liste des valeurs: Appariement de surface, Appariement de bord
-
Appariement de surface: Utilise le modèle de nuage de points de surface de l’objet pour l’appariement du modèle.
-
Appariement de bord: Utilise le modèle de nuage de points de bord de l’objet pour l’appariement du modèle.
Valeur par défaut: Appariement de surface
Recommandation de réglage: Pour améliorer la précision d’appariement, définissez le Mode d’appariement grossier sur Appariement de bord et le Mode d’appariement fin sur Appariement de surface.
De plus, ce paramètre peut être ajusté en fonction des caractéristiques de l’objet cible et de la qualité du nuage de points acquis.
-
Lorsque la surface de l’objet présente des caractéristiques évidentes et reconnaissables (telles que vilebrequins, rotors, etc.), il est recommandé d’utiliser l’appariement de surface, et vous devez créer un modèle de nuage de points qui représente les caractéristiques de surface de l’objet.
-
Lorsque l’objet est relativement plat et présente des caractéristiques de bord claires et régulières sous la caméra (telles que panneaux, patins de chenille, maillons de robot et disques de frein), il est recommandé d’utiliser l’appariement de bord, et vous devez créer un modèle de nuage de points qui représente les caractéristiques de bord de l’objet. Par ailleurs, si la qualité du nuage de points de l’objet est moyenne, il est recommandé d’utiliser l’appariement de surface.
-
Paramètres d’appariement grossier
- Mode de performance
-
Description: Ce paramètre est utilisé pour définir le compromis entre précision et vitesse d’appariement. Plus l’exactitude est élevée, plus le temps consommé est long.
Liste des valeurs: Haute vitesse, Standard, Haute précision, Personnalisé
Valeur par défaut: Standard
- Nombre de points attendu du modèle
-
Description: Ce paramètre est utilisé pour spécifier le nombre de points attendu dans le modèle de nuage de points. Définissez ce paramètre lorsque le Mode de performance est Personnalisé.
Valeur par défaut: 300
Instruction: En général, ce paramètre doit être défini lorsqu’un modèle de nuage de points de surface est utilisé pour l’appariement. Diminuer cette valeur favorise l’amélioration de la vitesse d’appariement, mais réduit également la précision d’appariement.
Paramètres d’appariement fin
- Mode de performance
-
Description: Ce paramètre est utilisé pour définir le compromis entre précision et vitesse d’appariement. Plus l’exactitude est élevée, plus le temps consommé est long.
Liste des valeurs: Haute vitesse, Standard, Haute précision, Très haute précision, Personnalisé
Valeur par défaut: Standard
Recommandation de réglage: Pour des scénarios nécessitant une grande précision de prise, il est recommandé de définir le Mode de performance sur Personnalisé et de définir ensuite l'Intervalle d’échantillonnage manuellement.
- Intervalle d’échantillonnage
-
Description: Plus la valeur du paramètre est grande, moins il y a de points dans le nuage de points échantillonné et plus le nuage est clairsemé. Par conséquent, l’appariement est moins précis. Plus la valeur du paramètre est petite, plus le temps d’exécution est long.
Valeur par défaut: 5.000 mm
- Nombre maximal d’itérations
-
Description: Plus la valeur est grande, plus la précision d’appariement est élevée, et plus la vitesse de traitement est lente.
Valeur par défaut: 40
- Nombre d’étapes de mise à jour de l’écart type
-
Description: Le paramètre est utilisé pour affiner l’écart type.
Valeur par défaut: 3
- Capacité de correction de la déviation
-
Description: Ce paramètre sert à définir l’intensité de la correction de déviation appliquée au résultat d’appariement grossier. Plus la capacité de correction est grande, plus il est probable que les poses grossièrement appariées puissent être corrigées en poses précisément appariées. Notez qu’une capacité de correction excessive peut entraîner une perte de précision d’appariement.
Liste des valeurs: Petite, Moyenne, Grande
Valeur par défaut: Petite
Recommandation de réglage: Si la pose obtenue après l’appariement grossier s’écarte significativement de la pose réelle de l’objet, définissez la Capacité de correction de la déviation sur Grande.
Appariement ultra-fin
| Extra Fine Matching ne peut être effectué que lorsque le modèle de nuage de points de l’objet cible sélectionné contient à la fois des nuages de points de surface et de bord. |
- Activer l’appariement ultra-fin
-
Description: Une fois activé, un mode différent sera utilisé pour l’appariement fin. Par exemple, si le mode d’appariement fin actuel est l’appariement de surface, l’activation de cette fonctionnalité effectuera à nouveau l’appariement fin en utilisant le modèle de nuage de points de bord. Une fois activé, la précision finale d’appariement peut être améliorée, mais le temps d’exécution sera légèrement augmenté.
Paramètre par défaut: Désactivé
Recommandation de réglage: Veuillez décider d’activer ou non cette fonctionnalité en fonction de la situation réelle. Si vous l’activez, assurez-vous que le modèle de nuage de points de surface/de bord utilisé pour l’appariement ultra-fin est précis et approprié.
Filtrage des poses
- Utiliser le NMS basé sur la distance
-
Description: Après activation de cette option, les poses candidates dont les distances aux poses sélectionnées sont inférieures à un dixième du diamètre de l’objet seront filtrées.
Valeur par défaut: Vrai
- Définir automatiquement l’angle de rotation maximal du modèle
-
Description: Une fois ce paramètre activé, l'Angle de rotation maximal du modèle sera défini automatiquement. Cette fonctionnalité est principalement utilisée pour filtrer les poses qui sont mal appariées avec les faces avant ou arrière de l’objet cible.
Valeur par défaut: Vrai
- Angle de rotation maximal du modèle
-
Description: Lorsque le modèle de nuage de points est apparié au nuage de points de la scène, les poses seront filtrées par l’angle de rotation du modèle autour de son axe X ou Y. Lorsque l’angle de rotation du modèle dépasse l'Angle de rotation maximal du modèle, la pose sera filtrée.
Valeur par défaut: 135.00°
Ajuster ou filtrer les poses issues de l’appariement grossier
- Sélectionner la stratégie
-
Description: Lorsque Ajuster l’orientation de l’axe X est sélectionné, les axes Z des poses obtenues à partir de l’appariement grossier restent fixes, tandis que les axes X pivotent vers la direction spécifiée. Lorsque Filtrer les correspondances potentiellement erronées est sélectionné, des poses pouvant entraîner des échecs d’appariement—calculées dans l’éditeur d’objet cible—sont utilisées pour affiner le processus d’appariement, en filtrant les poses peu fiables issues de l’appariement grossier.
Liste des valeurs: Aucune, Ajuster l’orientation de l’axe X, Filtrer les correspondances potentiellement erronées
Option Description Exemples de réglage N/A
Désactiver la fonctionnalité « Ajuster ou filtrer les poses issues de l’appariement grossier ».
Ajuster l’orientation de l’axe X
Ajuster l’orientation de l’axe X: Fixer l’axe Z de la pose obtenue à partir de l’appariement grossier et faire pivoter l’axe X vers la direction spécifiée. Ce paramètre est généralement utilisé pour la prise d’objets cibles présentant une symétrie circulaire (tels que bagues, disques de frein, etc.) ou dans des scénarios de prise où les orientations d’arrivée des objets sont généralement cohérentes, afin que les axes X des poses de l’objet cible pointent dans la même direction.
Notez que lorsque les poses d’arrivée des objets cibles varient fortement, appliquer une correction stricte au résultat de l’appariement grossier tout en laissant le résultat de l’appariement fin non corrigé peut entraîner l’absence de résultat d’appariement ou des résultats d’appariement incorrects.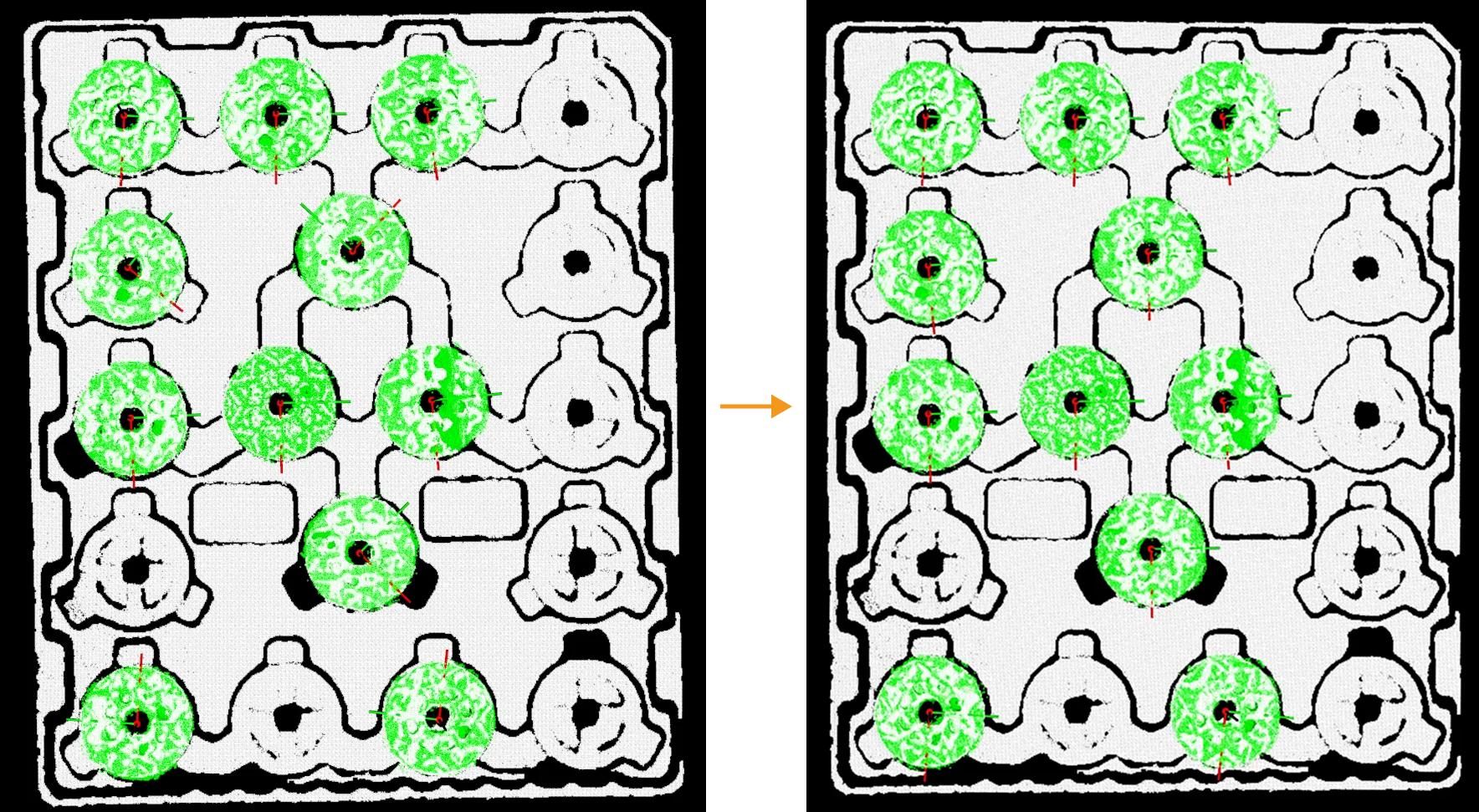
Filtrer les correspondances potentiellement erronées
Utilise les résultats calculés dans l’éditeur d’objet cible pour assister l’appariement, aidant à filtrer les poses grossièrement appariées. Ce paramètre est généralement utilisé pour des objets cibles symétriques ou presque symétriques (par exemple, maillons de chenille) afin de filtrer des poses potentiellement incorrectes parmi plusieurs poses candidates. Cette opération de filtrage est basée sur la symétrie de l’objet cible sous rotation autour de l’axe Z.
-
Pour des objets cibles rectangulaires présentant une symétrie de rotation à 180 degrés, afin de garantir que les orientations de l’axe X des poses appariées correspondent à celles du modèle de nuage de points, vous pouvez sélectionner « Filtrer les correspondances potentiellement erronées ». Le résultat de l’ajustement est illustré sur la figure ci-dessous.
-
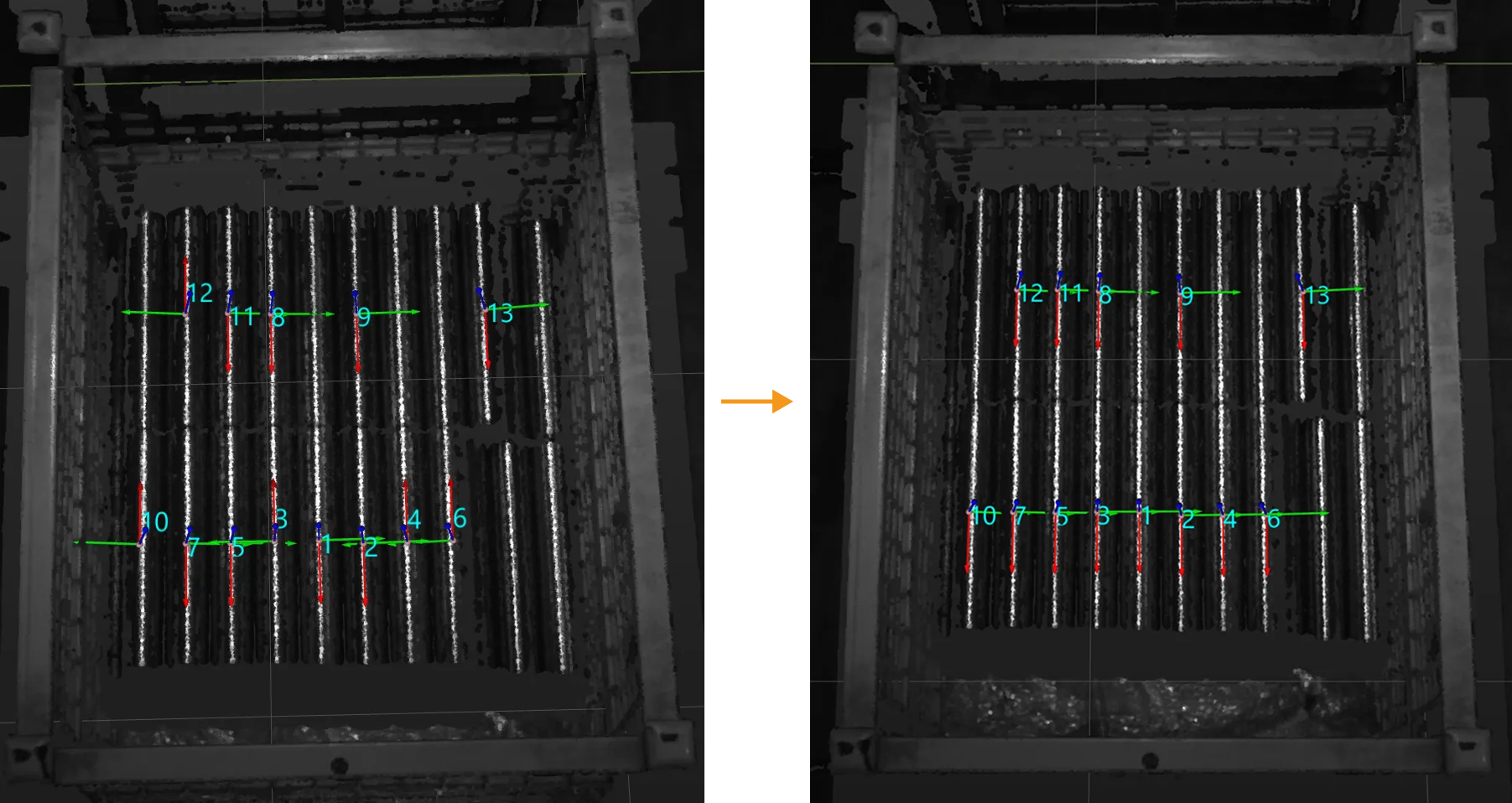
Si un objet cible est approximativement symétrique à 180°, mais que les deux extrémités de l’objet cible ont des structures différentes, l’objet cible est considéré comme non symétrique. De tels objets cibles sont sujets à une reconnaissance incorrecte. Pour améliorer la précision de reconnaissance, il est recommandé de sélectionner « Filtrer les correspondances potentiellement erronées » pour ce type d’objets cibles. Le résultat de l’ajustement est illustré sur la figure ci-dessous.
Valeur par défaut: Aucune
Instruction: Si vous devez utiliser le paramètre Filtrer les correspondances potentiellement erronées, veuillez activer Configurer le modèle de nuage de points sous Paramètres du modèle de nuage de points dans l’éditeur d’objet cible. Ensuite, sélectionnez Calculer des poses pour filtrer le résultat d’appariement ou Configurer la symétrie manuellement et configurez les paramètres pertinents selon les besoins.
Si vous définissez la symétrie de rotation de l’objet cible manuellement dans l’Éditeur d’objet cible, les paramètres de symétrie de rotation prendront effet non seulement pendant l’appariement grossier et l’appariement fin, mais aussi pendant l’appariement ultra-fin. -
Augmenter les objets longs et fins
- Activer l’augmentation pour les objets longs et fins
-
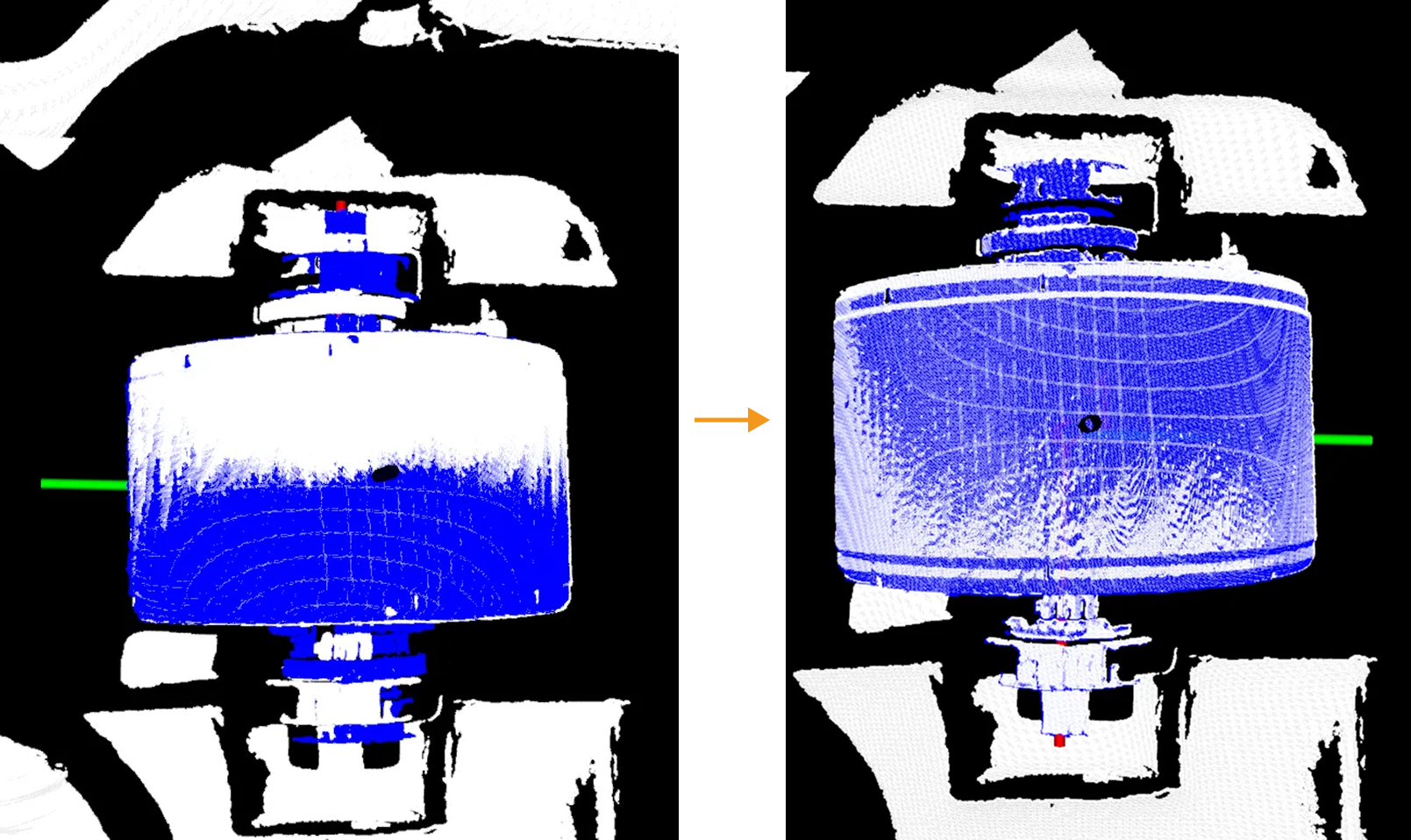
Description: Lors de l’appariement d’objets cibles longs et fins (tels que des arbres et des tubes carrés) avec des rapports d’aspect supérieurs à 3:1, l’objet cible et le nuage de points ont tendance à être désalignés le long de l’axe longitudinal de l’objet, avec des extrémités incapables de s’aligner précisément. L’activation de cette fonctionnalité peut améliorer la précision d’appariement des objets longs et fins.
Valeur par défaut: Vrai
Paramètres de confiance
Ce groupe de paramètres est utilisé pour évaluer et filtrer les résultats d’appariement pendant l’appariement 3D afin d’assurer la précision et la stabilité de l’appariement. Par exemple, un réglage approprié de ce groupe de paramètres peut garantir que les objets cibles sur la couche supérieure, normalement placés, peuvent être reconnus avec précision.
Tout d’abord, cette étape évalue les résultats d’appariement selon le Degré de validation des résultats défini et calcule la confiance des résultats d’appariement. Puis la confiance est comparée au Seuil de confiance pour filtrer les correspondances qualifiées.
| Confiance du résultat d’appariement = le taux de coïncidence entre le modèle de nuage de points et le nuage de points de la scène à apparier. |
- Stratégie de confiance
-
Description: Ce paramètre est utilisé pour sélectionner la méthode de définition de la stratégie de score combiné.
Liste des valeurs: Manuel, Auto
-
Auto: Définir automatiquement la stratégie de score combiné.
-
Manuel: Définir la stratégie de score combiné manuellement.
Valeur par défaut: Auto
-
- Stratégie de score combiné
-
Description: Ce paramètre est utilisé pour sélectionner la stratégie de score utilisée pour la vérification. Lorsque Prendre en compte à la fois la surface et le bord est sélectionné, les paramètres pour l’appariement de surface et l’appariement de bord sous Paramètres de confiance doivent être définis séparément pour mieux filtrer les résultats d’appariement.
Liste des valeurs: Prendre en compte à la fois la surface et le bord, Ne considérer que la surface
Valeur par défaut: Ne considérer que la surface
Recommandation de réglage: Lorsque la Stratégie de score combiné est définie sur Prendre en compte à la fois la surface et le bord, il est recommandé de définir une valeur plus élevée pour le Seuil de confiance d’appariement de surface et une valeur plus basse pour le Seuil de confiance d’appariement de bord. Lorsque la Stratégie de score combiné est définie sur Ne considérer que la surface, seul le score d’appariement de surface sera utilisé pour la vérification du résultat d’appariement.
- Degré de vérification des résultats
-
Description: Ce paramètre est utilisé pour définir le degré de rigueur appliqué lors de l’évaluation des résultats d’appariement.
Liste des valeurs: Faible, Standard, Élevé, Ultra élevé, Personnalisé
Valeur par défaut: Standard
Recommandation de réglage: En général, « Standard » est recommandé. Lorsqu’il est difficile de distinguer le modèle de nuage de points du nuage de points de la scène, un degré de vérification plus élevé peut être sélectionné.
- Rayon de recherche
-
Description: Ce paramètre est utilisé pour déterminer le degré de chevauchement entre le modèle de nuage de points et le nuage de points de la scène. Plus le rayon de recherche est petit, plus la confiance du résultat d’appariement est faible; plus le rayon de recherche est grand, plus la confiance du résultat d’appariement est élevée. Vous devez définir ce paramètre lorsque le Degré de vérification des résultats est défini sur Personnalisé.
Valeur par défaut: 10.000 mm
Recommandation de réglage: Si le score de validation du résultat d’appariement est faible, vous pouvez augmenter ce paramètre de manière appropriée; si le score de validation du résultat d’appariement est élevé, vous pouvez diminuer ce paramètre de manière appropriée.
- Intervalle d’échantillonnage
-
Description: Ce paramètre est utilisé pour le sous-échantillonnage du modèle et du nuage de points de la scène (uniquement pour l’évaluation des résultats d’appariement). Plus la valeur est grande, moins il y a de points dans le nuage de points échantillonné. Vous devez définir ce paramètre lorsque le Degré de vérification des résultats est défini sur Personnalisé.
Valeur par défaut: 5.000 mm
- Seuil de confiance
-
Description: Si la confiance du résultat d’appariement est supérieure au seuil, le résultat d’appariement est valide. Plus la valeur de confiance est élevée, plus le résultat d’appariement est précis.
Valeur par défaut: 0.3000
Recommandation de réglage: Il est recommandé de définir ce paramètre sur la valeur par défaut et de vérifier d’abord le résultat d’exécution. Si une fausse reconnaissance se produit, il est recommandé d’augmenter ce paramètre; si un faux négatif se produit, il est recommandé de diminuer ce paramètre.
- Prendre en compte la déviation des normales dans l’appariement de surface
-
Description: Lors de la vérification des résultats d’appariement de surface, tenez compte des écarts angulaires entre les normales des points du nuage de points de la scène et leurs homologues dans le modèle de nuage de points. Une fois ce paramètre activé, le nombre de résultats d’appariement en sortie peut être inférieur, mais la précision des résultats d’appariement sera améliorée.
Paramètre par défaut: Non sélectionné
Traitement du modèle
- Prendre en compte les trous dans l’appariement de surface
-
Description: Lors de l’appariement de surface, si les contours extérieurs du modèle de nuage de points et du nuage de points de l’objet cible correspondent, mais que le nuage de points de l’objet cible ou le modèle de nuage de points comporte des trous, cela peut entraîner des mésappariements (tels que des mésappariements entre bagues et disques). Une fois cette option activée, si le modèle de nuage de points de surface et l’objet cible ne peuvent pas correspondre dans les trous, la confiance correspondante de l’appariement de surface diminue. Si le modèle de nuage de points de surface a été édité et ne reflète plus fidèlement la forme de l’objet réel, par exemple si des motifs complexes au centre du modèle de nuage de points ont été supprimés, il est recommandé de désactiver cette fonctionnalité.
Valeur par défaut: Vrai
Supprimer les poses coïncidentes
- Supprimer les poses d’objets coïncidents
-
Description: Ce paramètre est utilisé pour déterminer s’il faut activer la fonctionnalité de suppression des objets coïncidents.
Valeur par défaut: Vrai
Pour les objets cibles à parois fines (tels que bacs et caisses navettes), si cette fonction ne fonctionne pas bien, vous pouvez utiliser l’étape Supprimer les objets coïncidents à la place pour supprimer les poses d’objets coïncidents. - Seuil du taux de coïncidence
-
Description: Si le taux de coïncidence des masques, obtenus par projection orthographique des deux nuages de points d’objet, dépasse cette valeur, la pose présentant une confiance plus faible sera supprimée. Définissez ce paramètre lorsque Supprimer les poses d’objets coïncidents est activé.
Valeur par défaut: 30%
Supprimer les poses chevauchées
- Supprimer les poses d’objets chevauchés
-
Description: Ce paramètre est utilisé pour déterminer s’il faut activer la fonctionnalité de suppression des objets chevauchés.
Valeur par défaut: Vrai
Pour les objets cibles à parois fines (tels que bacs et caisses navettes), si cette fonction ne fonctionne pas bien, vous pouvez utiliser l’étape Supprimer les objets chevauchés Lite pour supprimer les poses d’objets chevauchés à la place. - Seuil du taux de chevauchement
-
Description: Le seuil du taux de chevauchement entre l’objet et les autres objets. Si le taux de chevauchement est supérieur à cette valeur, l’objet sera considéré comme chevauché. Définissez ce paramètre lorsque Supprimer les poses d’objets chevauchés est activé.
Taux de chevauchement = Aire projetée du nuage de points chevauchant l’objet / Aire projetée du modèle de nuage de points de l’objet Valeur par défaut: 30%
Sortie
- Nombre maximal de sorties
-
Description: Ce paramètre spécifie le nombre maximal d’objets cibles de sortie pour des appariements réussis. Plus la valeur est grande, plus le temps d’exécution de l’étape est long.
Valeur par défaut: 10
Recommandation de réglage: Il est recommandé de définir ce paramètre de manière appropriée et d’éviter de le régler trop haut. Les modifications de ce paramètre ne prendront effet qu’après réexécution de l’étape, et le nombre de sorties sera limité en fonction du nouveau résultat d’appariement.
| Le nombre réel de résultats de sortie de l’appariement 3D peut ne pas correspondre au Nombre maximal de sorties défini. Si le Nombre maximal de sorties est défini sur 5, mais qu’il y a en tout 3 résultats de reconnaissance, le nombre final de résultats de reconnaissance en sortie est 3. |
Visualisation
- Contenu de la visualisation
-
Description: Après activation de « Sortie de débogage », l’option sélectionnée sera générée et affichée dans la fenêtre Sortie de débogage.
Liste des valeurs: Appariement grossier, Appariement fin, Ajuster l’orientation de l’axe X, Confiance, Supprimer les poses chevauchées, Résultat de sortie
Valeur par défaut: Résultat de sortie
Instruction: Veuillez activer Sortie de débogage pour afficher les poses dans la fenêtre Sortie de débogage.
- Afficher les poses
-
Description: Une fois activé, la pose sera affichée dans la fenêtre Sortie de débogage.
Paramètre par défaut: Activé