Guide des outils de la bibliothèque de robots
Cette section présente les procédures d’utilisation des « Outils de la bibliothèque de robots ».
Importer un robot
| Vous pouvez exporter le fichier de modèle de robot (fichier MROB) depuis la barre de menus de Mech-Viz > Outils > Outils de la bibliothèque de robots > Exporter le robot actuel, ou depuis la barre de menus de Mech-Vision > Robot et communication > Outils de la bibliothèque de robots > Exporter le robot actuel. |
Vous pouvez utiliser l’une des méthodes suivantes pour importer le modèle de robot.
-
Méthode 1
-
Faites glisser le fichier de modèle de robot au format MROB dans la fenêtre du logiciel Mech-Vision.
-
Un message « Robot(s) importé(s) avec succès » s’affiche. Cliquez sur OK dans la fenêtre contextuelle.
-
-
Méthode 2
-
Dans la barre de menus de Mech-Vision, sélectionnez .
-
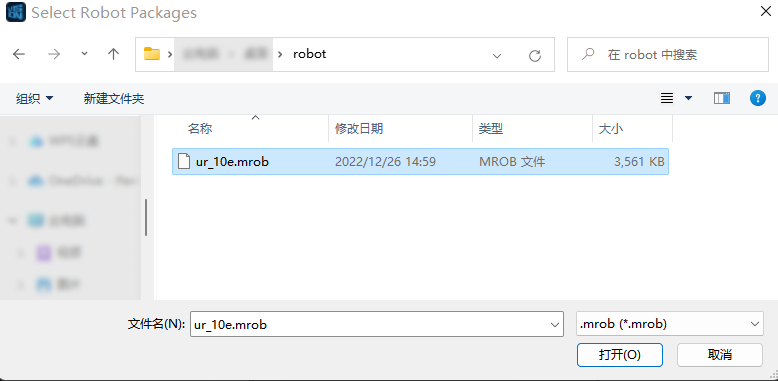
Sélectionnez le fichier MROB dans la fenêtre Sélection des paquets de robots, puis cliquez sur Ouvrir.
-
Un message « Robot(s) importé(s) avec succès » s’affiche. Cliquez sur OK dans la fenêtre contextuelle.
-
Exporter le robot actuel
Suivez ces étapes pour exporter le modèle de robot actuel.
-
Dans la barre de menus de Mech-Vision, sélectionnez .
-
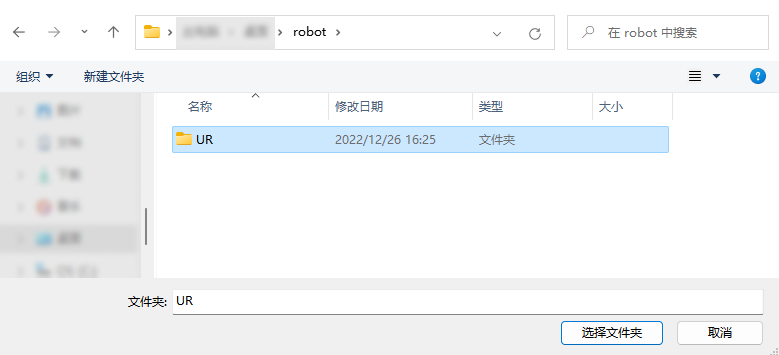
Dans la fenêtre contextuelle, sélectionnez le dossier vers lequel le fichier du modèle de robot sera exporté, puis cliquez sur Sélectionner le dossier.
-
Un message « Robot(s) exporté(s) avec succès » s’affiche. Cliquez sur OK dans la fenêtre contextuelle.
|
Si le modèle de robot est exporté avec succès, un fichier MROB apparaîtra dans le dossier spécifié. |