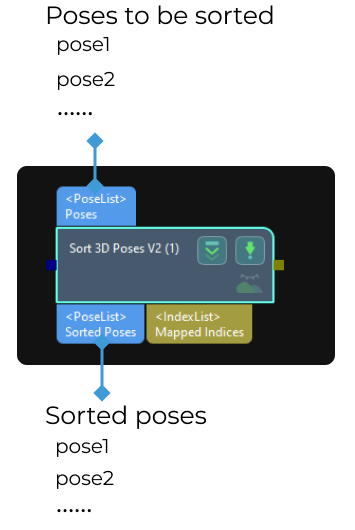
Tri des poses 3D V2
Scénario d’utilisation
Cette étape trie les poses selon des règles spécifiées pour le traitement ultérieur des poses ou la stratégie de préhension.
Paramètres
Cette étape propose onze méthodes pour trier les poses. La description détaillée est la suivante.
Trier par Aucun
Description
Les poses d’entrée ne seront pas triées lorsque vous sélectionnez « Aucun » à côté de « Trier par ».
Paramètres
- Afficher le nuage de points dans le repère sélectionné
-
Description du paramètre: Ce paramètre permet de sélectionner le repère de référence qui affiche le nuage de points.
Liste de valeurs: Coordonnées du robot, Coordonnées de la caméra.
Valeur par défaut: Coordonnées du robot.
Instruction d’ajustement: Sélectionnez ce paramètre selon la situation réelle.
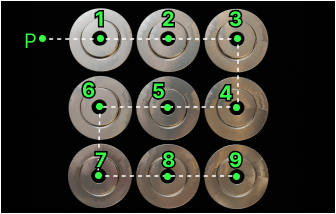
Trier selon la forme en S sur le plan
Description
Trier les poses en lignes et en colonnes en fonction de la pose de référence donnée (en donnant la priorité au tri des poses selon « Direction de ligne »). Cette méthode est généralement utilisée pour le déchargement de pièces bien rangées ou la dépalettisation.
Paramètres
- Direction de ligne
-
Description du paramètre: Ce paramètre est utilisé pour définir la direction des lignes lorsque les poses sont triées sur le plan.
Liste de valeurs: Direction X positive, Direction Y positive, Direction Z positive, Direction X négative, Direction Y négative, Direction Z négative.
Valeur par défaut: Direction X positive.
- Direction de colonne
-
Description du paramètre: Ce paramètre est utilisé pour définir la direction des colonnes lorsque les poses sont triées sur le plan.
Liste de valeurs: Direction X positive, Direction Y positive, Direction Z positive, Direction X négative, Direction Y négative, Direction Z négative.
Valeur par défaut: Direction Y positive.
- Intervalle de ligne
-
Description du paramètre: Ce paramètre est utilisé pour définir l’intervalle (en mm) entre les lignes lorsque les poses sont triées sur le plan.
Valeur par défaut: 100.000 mm
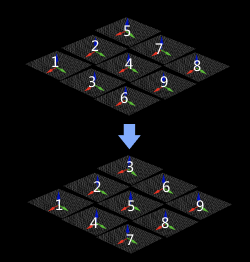
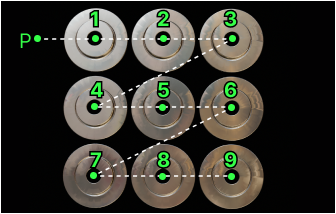
Trier selon la forme en Z sur le plan
Description
Trier les poses en lignes et en colonnes en fonction de la pose de référence donnée (en donnant la priorité au tri des poses selon « Direction de ligne »). Cette méthode est généralement utilisée pour le déchargement de pièces bien rangées ou la dépalettisation.
Paramètres
- Direction de ligne
-
Description du paramètre: Ce paramètre est utilisé pour définir la direction des lignes lorsque les poses sont triées sur le plan.
Liste de valeurs: Direction X positive, Direction Y positive, Direction Z positive, Direction X négative, Direction Y négative, Direction Z négative.
Valeur par défaut: Direction X positive.
- Direction de colonne
-
Description du paramètre: Ce paramètre est utilisé pour définir la direction des colonnes lorsque les poses sont triées sur le plan.
Liste de valeurs: Direction X positive, Direction Y positive, Direction Z positive, Direction X négative, Direction Y négative, Direction Z négative.
Valeur par défaut: Direction Y positive.
- Intervalle de ligne
-
Description du paramètre: Ce paramètre est utilisé pour définir l’intervalle (en mm) entre les lignes lorsque les poses sont triées sur le plan.
Valeur par défaut: 100.000 mm
Trier par valeur X de la pose
Trier par valeur Y de la pose
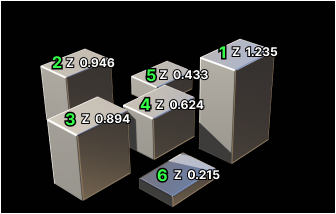
Trier par valeur Z de la pose
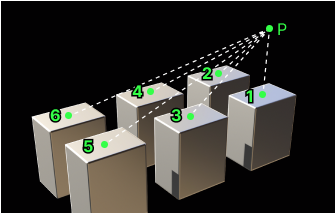
Trier par distance entre la pose et la pose de référence
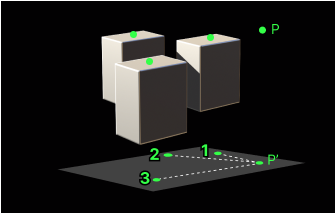
Trier par distance entre la pose et la pose de référence sur le plan XOY
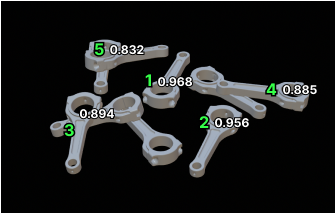
Trier par valeurs de confiance de la pose
Trier par projection de la pose dans la direction de référence
Description
Projeter la pose sur les axes de la pose de référence, calculer la distance de projection, puis trier les poses selon la distance.
Paramètres
- Croissant
-
Description du paramètre: Une fois cette option sélectionnée, les poses seront triées par leurs distances de projection de la plus courte à la plus longue.
Valeur par défaut: sélectionné.
- Direction de référence
-
Description du paramètre: Ce paramètre permet de sélectionner l’axe de la pose de référence et sa direction utilisée pour la projection de la pose.
Liste de valeurs: Direction X positive, Direction Y positive, Direction Z positive, Direction X négative, Direction Y négative, Direction Z négative.
Valeur par défaut: Direction X positive.