Symétrie de rotation
Cette section présente la symétrie de rotation de l’objet cible.
Introduction
| La « symétrie » dans cette section désigne la « symétrie de rotation ». |
La symétrie de rotation est la propriété de l’objet cible qui lui permet de coïncider avec lui-même après une rotation d’un certain angle autour de son axe de symétrie.
Si un objet cible présente une symétrie de rotation, vous pouvez configurer les paramètres de symétrie de rotation selon les besoins spécifiques dans éditeur d’objet cible.
Lorsque le Type de point de passage est Pose de l’objet cible, la configuration de la symétrie de rotation peut éviter des rotations inutiles de l’outil du robot lors de la manipulation de l’objet cible. Cela augmente le taux de réussite de la planification de trajectoire et réduit le temps nécessaire à la planification, permettant au robot de se déplacer plus souplement et rapidement.
Type de symétrie de rotation
Déterminer l’axe de symétrie
Vous pouvez spécifier l’axe de symétrie lors du paramétrage du modèle de collision dans éditeur d’objet cible. Les axes X/Y/Z sont définis dans le repère de l’objet cible.
Le tableau ci-dessous présente les types de symétrie de certains objets cibles placés de manière courante.
Non symétrique
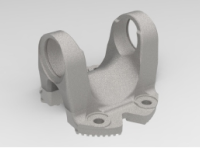
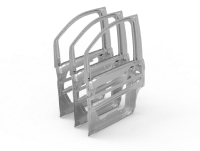
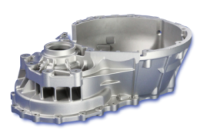
Les objets cibles du tableau ci-dessous sont des objets non symétriques.
|
|
|
|
Patin de chenille du bulldozer |
Chape à bride de l’arbre de transmission |
Tôle de porte de voiture |
Cloche d’embrayage |

Symétrique par rapport à l’axe Z
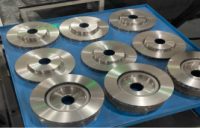
Lorsque les objets cibles sont placés de manière normale, les objets présentés dans le tableau ci-dessous sont symétriques par rapport à l’axe Z.
 |
 |
 |
 |
|---|---|---|---|
Disque de frein |
Bride |
Engrenage |
Carton |
Symétrique par rapport aux axes X/Y
Lorsque les objets cibles sont placés de manière normale, les objets présentés dans le tableau ci-dessous sont symétriques par rapport aux axes X/Y.
 |
 |
 |
 |
|---|---|---|---|
Barres d’acier hautement réfléchissantes disposées soigneusement |
Barres d’acier empilées aléatoirement |
Embouts de conduites d’huile |
Boulons |
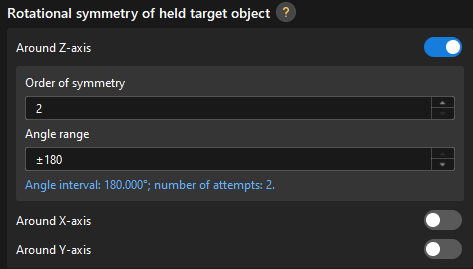
Ordre de symétrie
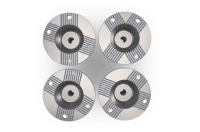
Un objet à symétrie de rotation coïncide avec lui-même après une rotation autour de son axe de symétrie d’un certain degré (c.-à-d., angle de rotation a°), et l’ordre de symétrie = 360°/a°.
Pour un carton ordinaire, l’ordre de symétrie est 2 ; pour un prisme triangulaire, l’ordre de symétrie est 3 ; pour un cylindre, l’ordre de symétrie est infini.
 |
 |
 |
 |
|---|---|---|---|
Ordre de symétrie = 2 |
Ordre de symétrie = 4 |
Ordre de symétrie = 9 |
Symétrie circulaire |
Plage angulaire
Comme illustré sur la figure ci-dessous, l’angle entre B et C représente la plage angulaire.
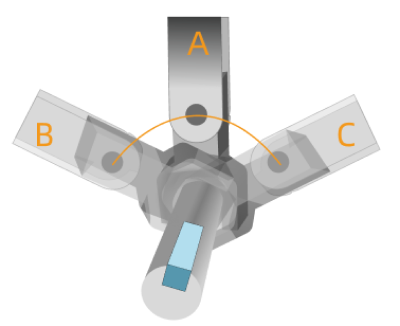
Le robot tente des prises en fonction de la symétrie de l’objet cible dans une plage angulaire spécifiée.
La Plage angulaire doit être définie en fonction de facteurs tels que le placement de l’objet cible, la forme du bac, le type d’outil terminal et le temps de cycle.
Une plage angulaire large avec un ordre de symétrie élevé peut ralentir la planification de trajectoire ; tandis qu’une plage angulaire petite peut exclure des points de prise valides.
Nombre d’essais
Le nombre d’essais est calculé automatiquement à partir de l'ordre de symétrie et de la plage angulaire.
En supposant que l'ordre de symétrie = 10, et que la plage angulaire est ±80°, alors l’intervalle angulaire sera calculé par 360°/10 = 36°. Le nombre d’essais dans une direction peut être calculé par 80/36 = 2 avec un reste de 8, ce qui donne 2 essais aux angles 36° et 72°. Le nombre total d’essais est égal à 1 + 2 * 2 = 5, à savoir aux angles -72°, -36°, 0°, 36° et 72°.