Analyser l’erreur des paramètres extrinsèques dans une configuration ETH
S’assurer que la plaque d’étalonnage a été installée
Pour obtenir la pose de la plaque d’étalonnage et le nuage de points de la scène contenant la plaque d’étalonnage pour l’évaluation de l’erreur des paramètres extrinsèques ETH, il est nécessaire de vérifier la plaque d’étalonnage avant de continuer. Assurez-vous que la plaque d’étalonnage est montée sur le robot. Pour plus d’instructions, veuillez consulter Méthode de montage de la plaque d’étalonnage.
Construire un projet pour obtenir les poses de la plaque d’étalonnage
-
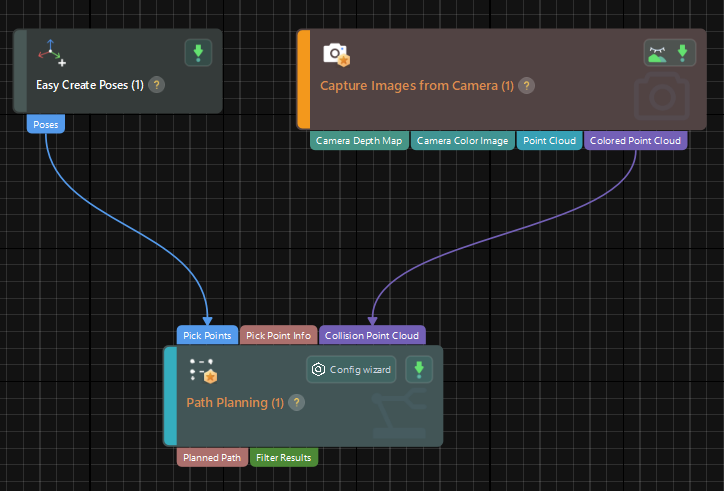
Ajouter l’étape « Capturer des images depuis la caméra ».
Créez un nouveau projet et ajoutez l’étape « Capturer des images depuis la caméra », ou sélectionnez l’étape dans un projet ouvert. Cliquez sur le bouton Sélectionner la caméra dans le panneau Paramètres de l’étape pour sélectionner et connecter la caméra. Sélectionnez ensuite les paramètres d’étalonnage de la caméra à vérifier.
-
Ajouter l’étape « Planification de trajectoire ».
Ajoutez l’étape « Planification de trajectoire » et connectez le port de sortie Nuage de points coloré de l’étape « Capturer des images depuis la caméra » au port d’entrée Nuage de points de collision de cette étape.
-
Ajouter l’étape « Création facile de poses ».
Ajoutez l’étape « Création facile de poses » et connectez le port de sortie Poses au port d’entrée Points de vision de l’étape « Planification de trajectoire ».
Le projet construit est illustré ci-dessous.
-
Entrer dans l’interface de simulation.
Cliquez sur Assistant de configuration dans le panneau Paramètres de l’étape de l’étape « Planification de trajectoire » pour entrer dans la zone de simulation 3D.
Synchroniser la pose du robot réel et obtenir le nuage de points de la scène contenant le nuage de points de la plaque d’étalonnage
-
Cliquez sur Assistant de configuration dans le panneau Paramètres de l’étape de l’étape « Planification de trajectoire » pour entrer dans la zone de simulation 3D.
-
Synchronisez la pose du robot réel avec celle du robot simulé dans l’étape « Planification de trajectoire », de sorte que les poses du robot simulé dans la zone de simulation 3D et du robot réel soient identiques.
-
Cliquez sur le bouton Simuler pour visualiser le nuage de points de la scène contenant la plaque d’étalonnage. (Veuillez ignorer le message d’erreur après avoir cliqué sur Simuler.)
Créer un TCP virtuel sur la plaque d’étalonnage
-
Ajoutez un outil d’extrémité aux ressources dans l’outil de planification de trajectoire.
-
Vérifiez la visualisation de l’outil d’extrémité dans la zone de simulation 3D, et ajustez les paramètres pour que le TCP coïncide avec le centre d’un cercle sur la plaque d’étalonnage (l’axe de la pose doit coïncider avec la croix dans le cercle et le plan XOY doit être étroitement aligné avec le plan d’étalonnage).
-
Saisissez un nom d’outil et cliquez sur OK pour terminer la création du TCP virtuel.
Vérifier les paramètres extrinsèques à d’autres positions dans l’espace de travail
-
Déplacez le robot réel à l’aide du boîtier d’apprentissage vers d’autres positions dans l’espace de travail.
-
Synchronisez la pose du robot réel avec celle du robot simulé dans l’étape « Planification de trajectoire », de sorte que les poses du robot simulé dans la zone de simulation 3D et du robot réel soient identiques.
-
Cliquez sur le bouton « Simuler » pour obtenir le nouveau nuage de points de la scène contenant la plaque d’étalonnage.
-
Vérifiez si le TCP virtuel ajouté précédemment coïncide avec le centre du cercle sur la plaque d’étalonnage.
Autres suggestions de vérification
S’il existe une erreur significative dans les paramètres extrinsèques, veuillez vous référer aux suggestions suivantes:
-
La précision des paramètres extrinsèques est principalement influencée par la précision absolue du robot. Veuillez vérifier la précision absolue du robot.
-
Vous pouvez essayer de créer différents modèles de nuages de points à différentes positions ou de déplacer le robot en mode jogging pour enregistrer différents points de prise afin de compenser la précision absolue du robot.