Guide d’apprentissage pour le guidage robotique 3D 
Guide d’apprentissage
|
 Présentation du guidage robotique 3D
Présentation du guidage robotique 3D
La solution de guidage robotique 3D intègre les technologies de détection, de perception et de programmation/planification robotique de Mech-Mind dans une solution complète, visant à relever les défis auxquels les robots sont confrontés dans des environnements complexes, inconnus ou dynamiques.
|
Pour les logiciels et les versions correspondantes nécessaires au déploiement de cette solution, veuillez consulter Combinaisons de versions logicielles recommandées pour la solution de guidage robotique 3D.
Pour les modèles de robots déjà pris en charge par le système de vision, voir Robots pris en charge.
 Prise en main
Prise en main
Fournit des tutoriels de démarrage pour les nouveaux utilisateurs et les débutants. En étudiant ces tutoriels, vous pouvez découvrir brièvement la solution de guidage robotique 3D de Mech-Mind et tenter de construire votre première application robotique guidée par vision 3D.
Tutoriel : Chargement par vision d’objets cibles disposés de manière ordonnée |
|
Tutoriel : Chargement par vision d’objets cibles empilés de manière aléatoire |
|
Tutoriel : Dépalettisation de cartons unitaires guidée par vision |
|
Tutoriel : Positionnement et assemblage guidés par vision
|
|
 Déploiement d’applications pratiques
Déploiement d’applications pratiques
Fournit l’approche, le mode opératoire et les retours d’expérience pour déployer des applications dans des projets réels. Après avoir pris connaissance de la solution de guidage robotique 3D, vous pouvez continuer à apprendre les connaissances et l’expertise nécessaires au déploiement d’applications robotiques guidées par vision 3D dans cette partie.
L’approche de déploiement d’une application robotique guidée par vision 3D est illustrée dans la figure suivante.

La conception de la solution de vision consiste à sélectionner les modèles matériels et à déterminer les modes de montage et les méthodes de traitement de vision selon les exigences du projet.

Pour plus de détails, reportez-vous à Conception de la solution de vision.
La configuration matérielle du système de vision consiste à intégrer le matériel (caméra et PC industriel) dans l’environnement réel afin de prendre en charge le fonctionnement normal du système de vision.
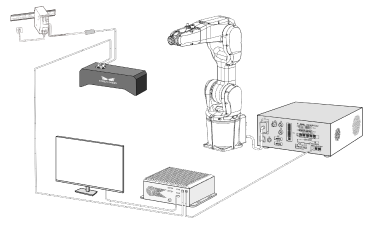
Le processus de configuration matérielle du système de vision peut varier selon les modes de montage de la caméra. Pour plus de détails, reportez-vous à Configuration matérielle du système de vision.
La configuration matérielle du système de vision achève l’intégration matérielle du système de vision au système robotique, tandis que la configuration de la communication robot réalisera l’intégration de communication entre les deux systèmes. Cela garantit que le système de vision et le côté robot peuvent échanger des données avec exactitude en temps réel.
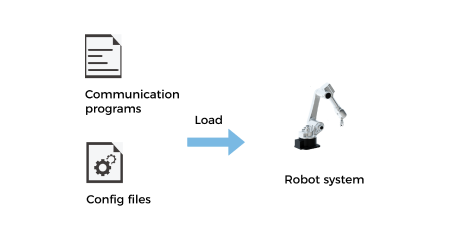
Pour configurer la communication robot, vous devez généralement charger dans le système robotique le programme de communication et les fichiers de configuration fournis par Mech-Mind, puis effectuer les configurations de communication correspondantes. Pour plus de détails, reportez-vous à Configuration de la communication robot.
La perception du robot de l’environnement doit être réalisée au moyen des « yeux (caméra) ». La calibration main-œil est utilisée pour établir la relation de transformation entre le repère de la caméra et le repère du robot.
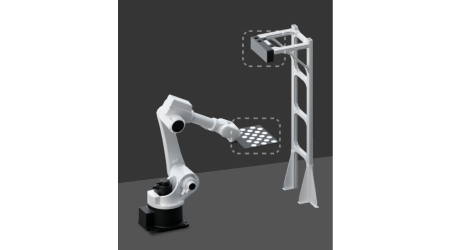
Pour différents types de robots, modes de montage de caméra et modes de communication, l’outil de calibration du logiciel Mech-Mind Mech-Vision a fourni des procédures de calibration standardisées, vous aidant à réaliser facilement la calibration main-œil. Pour plus de détails, reportez-vous à Calibration main-œil.

La configuration du projet de vision est cruciale pour le déploiement d’une application robotique guidée par vision 3D. Elle permet la détection et la localisation des objets cibles.
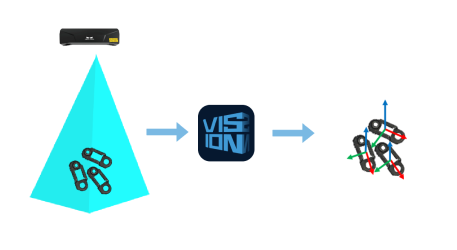
Pour plus de détails, reportez-vous à Configuration du projet de vision.
L’objectif ultime du déploiement d’une application robotique guidée par vision 3D est d’obtenir une préhension réussie. À cette étape, vous devez construire un flux de travail de préhension robotique afin que le robot puisse prélever les objets avec précision sous la guidance des résultats de vision.

Les manières de construire le flux de travail de préhension du robot peuvent varier selon les modes de communication sélectionnés. Pour plus de détails, reportez-vous à Préhension.
Pour des guides pratiques pour davantage de scénarios d’application, veuillez vous référer à Pratiques de cas typiques du guidage robotique 3D.
 Dépannage et maintenance
Dépannage et maintenance
Vous pouvez vous référer à cette partie pour des conseils de dépannage ou une aide en cas de panne ou d’anomalie durant le déploiement de l’application ou la production ultérieure.
Fournit aux ingénieurs de mise en service des retours d’expérience de mise en service et des moyens de trouver de l’aide pendant le déploiement de l’application.
Retour d’expérience de mise en service :
Trouver de l’aide : Communauté - Catégorie Questions & Réponses
Fournit aux ingénieurs de terrain des méthodes de maintenance et de service du système de vision ainsi que des solutions aux problèmes courants pendant la production.
Maintenance et service :
Trouver de l’aide : Communauté - Catégorie Questions & Réponses