Configuration matérielle du système de vision
La configuration matérielle du système de vision consiste à intégrer le matériel (caméra et PC industriel) dans l’environnement réel pour assurer le fonctionnement normal du système de vision.
À cette étape, vous devez installer et connecter le matériel du système de vision.
Pour construire le Mech-Mind Vision System, suivez ces étapes : Vérifier le contenu du colis → Installer le matériel → Connecter le réseau → Mettre à niveau le logiciel (optionnel) → Confirmer que le système de vision peut capturer des images normalement.
| Si le projet exige une grande précision de préhension, assurez une bonne précision de préhension de l’application lors du déploiement en suivant les conseils de Sujet : Amélioration de la précision de préhension. |
Vérifier le contenu du colis
-
Après réception du colis de la caméra, assurez-vous que le colis est intact.
-
Vérifiez le contenu par rapport à la « liste d’emballage » dans le colis afin de vous assurer qu’aucun appareil ni accessoire ne manque ou n’est endommagé.
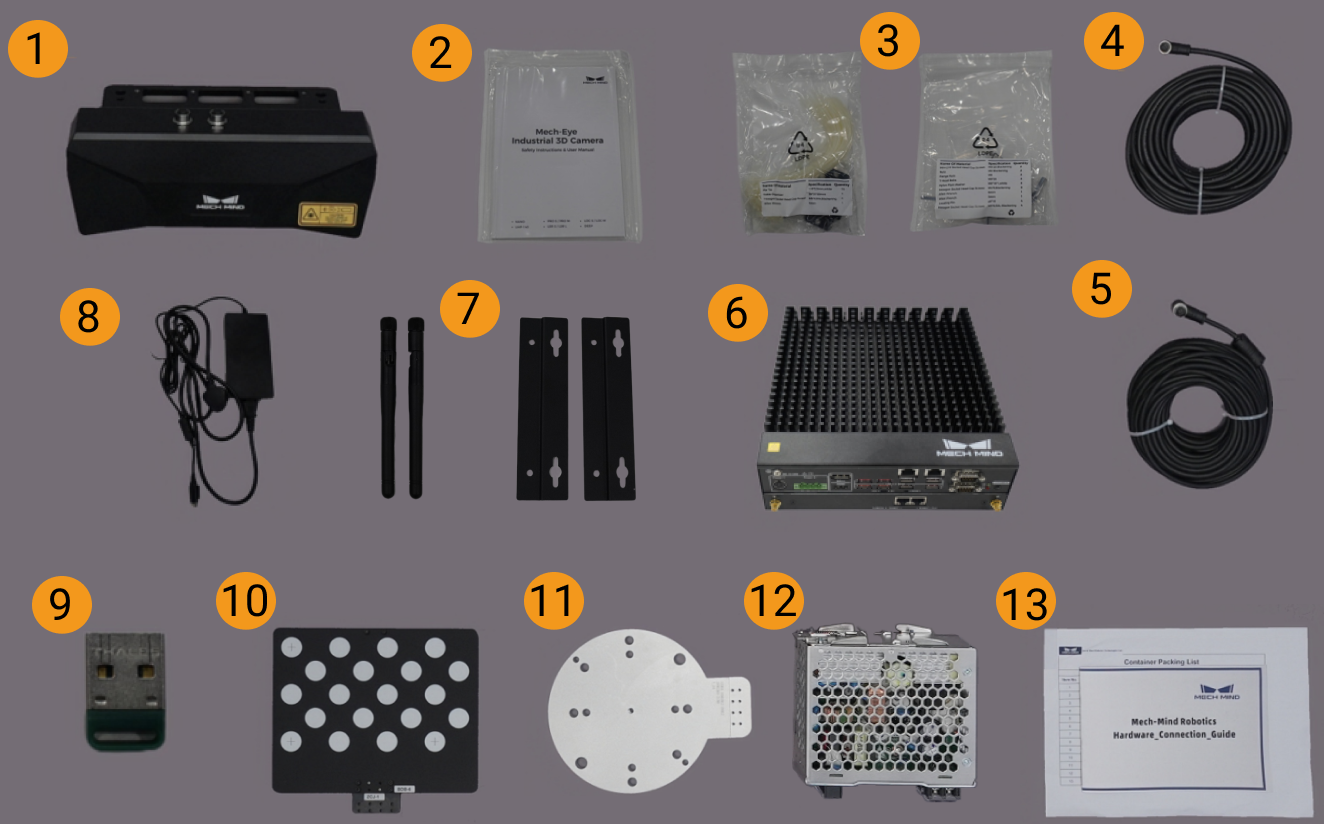
La figure suivante montre les éléments et accessoires inclus dans le colis. Ils sont fournis à titre de référence uniquement. Veuillez prendre la liste d’emballage du colis réel comme référence finale.
| N° | Catégorie | Nom | Fonction |
|---|---|---|---|
1 |
Caméra et accessoires |
Caméra 3D industrielle Mech-Eye |
Capture des images |
2 |
Manuel utilisateur et spécifications techniques de la caméra |
Manuel d’utilisation et spécifications techniques de la caméra 3D industrielle Mech-Eye |
|
3 |
Boîte d’accessoires de la caméra |
Permet de monter la caméra |
|
4 |
Câble d’alimentation CC de la caméra |
Relie la caméra à l’alimentation sur rail DIN ; des câbles d’alimentation de longueurs différentes peuvent être sélectionnés selon les besoins |
|
5 |
Câble Ethernet de la caméra |
Relie la caméra et l’IPC ; des câbles Ethernet de différentes longueurs peuvent être sélectionnés selon les besoins |
|
6 |
IPC et accessoires |
Mech-Mind IPC STD |
Fournit l’environnement d’exécution pour les logiciels Mech-Mind |
7 |
Accessoires IPC |
Accessoires IPC tels que des supports de montage et des antennes Wi-Fi externes |
|
8 |
Câble et adaptateur d’alimentation IPC |
Alimente l’IPC |
|
9 |
Accessoires du projet |
Dispositif de licence logiciel (USB), aussi appelé dongle de licence |
Autorise le logiciel |
10 |
Plaque de calibration |
Calibre la caméra |
|
11 |
Adaptateur de bride |
Relie la plaque de calibration à la bride du robot |
|
12 |
Alimentation sur rail DIN (optionnelle) |
Alimente la caméra 3D industrielle Mech-Eye |
|
13 |
Liste d’emballage |
Liste tous les appareils et accessoires du colis |
|
|
Contactez Mech-Mind si des éléments manquent ou sont endommagés. |
Préparer d’autres matériels
Dans ce tutoriel, outre les éléments du colis, vous devez encore préparer vous-même les matériels indiqués dans le tableau suivant.
| Article | Fonction |
|---|---|
Moniteur |
Fournit l’affichage pour l’IPC |
Câble HDMI |
Relie le moniteur et l’IPC |
Câble Ethernet RJ45 |
Relie l’IPC et le contrôleur du robot |
| L’IPC et le contrôleur du robot sont généralement connectés directement via un câble Ethernet RJ45-à-RJ45, et l’IPC et la caméra sont directement connectés via le câble Ethernet de la caméra. Vous pouvez également utiliser un routeur pour connecter l’IPC et le contrôleur du robot, ainsi que l’IPC et la caméra ; ce cas n’est pas couvert dans ce sujet. |
Installer le matériel
| Si le mode de montage de la caméra sélectionné est eye to hand (ETH) lors de la conception de la solution de vision, suivez la section Monter la caméra (ETH) ; si le mode de montage sélectionné est eye in hand (EIH), suivez la section Monter la caméra (EIH). |
Monter la caméra (ETH)
| En mode ETH, la caméra est fixée sur un support indépendant du robot. |
Montez les supports de montage de la caméra conformément à la section Conception et montage du support de caméra dans une installation ETH. Une fois le support de caméra solidement monté, vous pouvez commencer à monter la caméra.
-
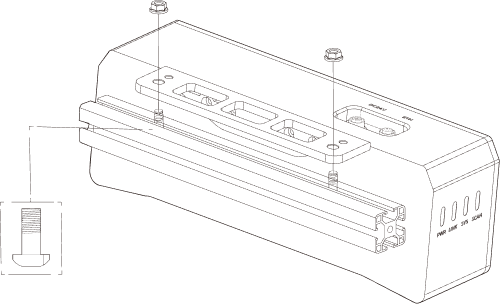
Récupérez les boulons de montage de la caméra et la clé dans la boîte d’accessoires de la caméra.
-
Serrez les deux boulons avec la clé comme indiqué ci-dessous.
-
Veuillez retirer le film de protection de l’objectif après le montage de la caméra.
-
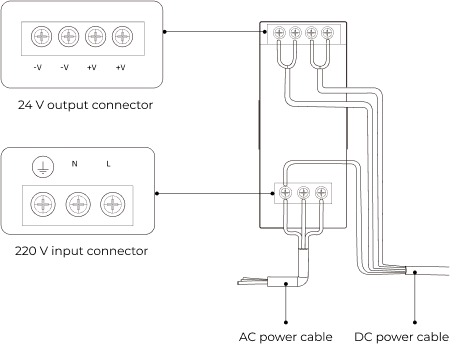
Alimentez la caméra via l’alimentation sur rail DIN.
-
Connectez le câble d’alimentation CC :
-
Reliez les fils +V aux bornes de sortie 24 V +V ;
-
Reliez les fils -V aux bornes de sortie 24 V -V ;
-
Insérez le fil PE dans la borne d’entrée 220 V
 .
.
-
-
-
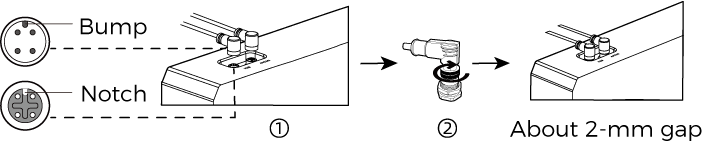
Installez le câble Ethernet de la caméra.
Assurez-vous d’aligner le bossage du connecteur M12 avec l’encoche du port ETH, puis serrez l’écrou après avoir branché le câble.
-
Fixez, câblez et cheminez les câbles Ethernet et les câbles d’alimentation de la caméra conformément à la section Directives de montage des câbles de caméra.
Monter la caméra (EIH)
| En mode EIH, la caméra est montée sur la dernière articulation du robot via un support de montage de caméra. |
Montez les supports de montage de la caméra conformément à la section Conception et montage du support de caméra dans une installation EIH. Une fois le support de caméra solidement monté, vous pouvez commencer à monter la caméra.
-
Récupérez les boulons de montage de la caméra et la clé dans la boîte d’accessoires de la caméra.
-
Serrez les deux boulons avec la clé comme indiqué ci-dessous.
-
Veuillez retirer le film de protection de l’objectif après le montage de la caméra.
-
Alimentez la caméra via l’alimentation sur rail DIN.
-
Connectez le câble d’alimentation CC :
-
Reliez les fils +V aux bornes de sortie 24 V +V ;
-
Reliez les fils -V aux bornes de sortie 24 V -V ;
-
Insérez le fil PE dans la borne d’entrée 220 V
.
-
-
-
Installez le câble Ethernet de la caméra.
Assurez-vous d’aligner le bossage du connecteur M12 avec l’encoche du port ETH, puis serrez l’écrou après avoir branché le câble.
-
Fixez, câblez et cheminez les câbles Ethernet et les câbles d’alimentation de la caméra conformément à la section Directives de montage des câbles de caméra.
Monter l’IPC avec des cadres de montage
Suivez ces étapes pour fixer l’IPC à un mur ou une autre surface à l’aide de deux supports de montage.
-
Retournez l’appareil.
-
Alignez les trous de vis de montage des deux côtés du support avec les trous de vis correspondants situés sur le dessous.
-
Fixez l’appareil et le support en insérant séparément des vis de retenue dans les supports.

-
Percez des trous dans les surfaces de montage prédéterminées.
-
Alignez les trous de montage de part et d’autre du cadre de montage avec les trous percés sur la surface de montage prédéterminée.
-
Insérez et serrez les 4 vis de retenue pour fixer l’appareil sur la surface de montage cible.
-
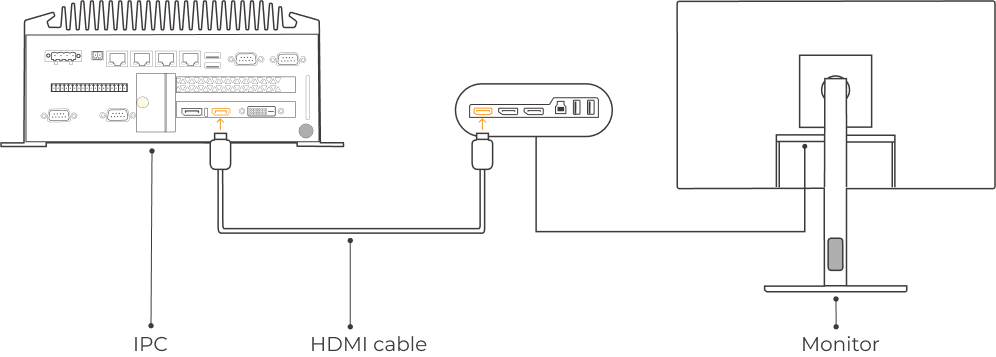
Reliez l’IPC et le moniteur avec le câble HDMI.
Branchez une extrémité du câble HDMI dans le port HDMI du moniteur, et l’autre extrémité dans le port HDMI de l’IPC, comme ci-dessous.
-
Reliez l’IPC à l’alimentation avec l’adaptateur secteur.
Branchez le câble d’alimentation de l’adaptateur secteur sur le connecteur d’alimentation de l’IPC. Reliez l’adaptateur à l’alimentation de l’autre côté.
-
Insérez le dongle de licence.
Branchez le dongle de licence sur un port USB de l’IPC.
-
Une fois l’IPC raccordé à l’alimentation, mettez l’IPC sous tension.
-
Si l’IPC démarre normalement, le témoin d’alimentation doit être allumé de façon fixe.
-
Si l’IPC ne peut pas démarrer, contactez l’assistance technique de Mech-Mind.
-
Connecter le réseau
Dans cette section, vous apprendrez à connecter le réseau entre l’IPC et la caméra, et entre l’IPC et le robot.
Dans les sections suivantes, les adresses IP ci-dessous seront utilisées pour les paramètres réseau. Ajustez les paramètres réseau selon votre environnement réseau réel.
| Appareil | Adresse IP | |
|---|---|---|
IPC |
Port Ethernet relié à la caméra |
192.168.100.10 |
Port Ethernet relié au contrôleur du robot |
192.168.200.10 |
|
Caméra |
192.168.100.20 |
|
Robot |
192.168.200.20 (déjà défini sur le robot) |
|
|
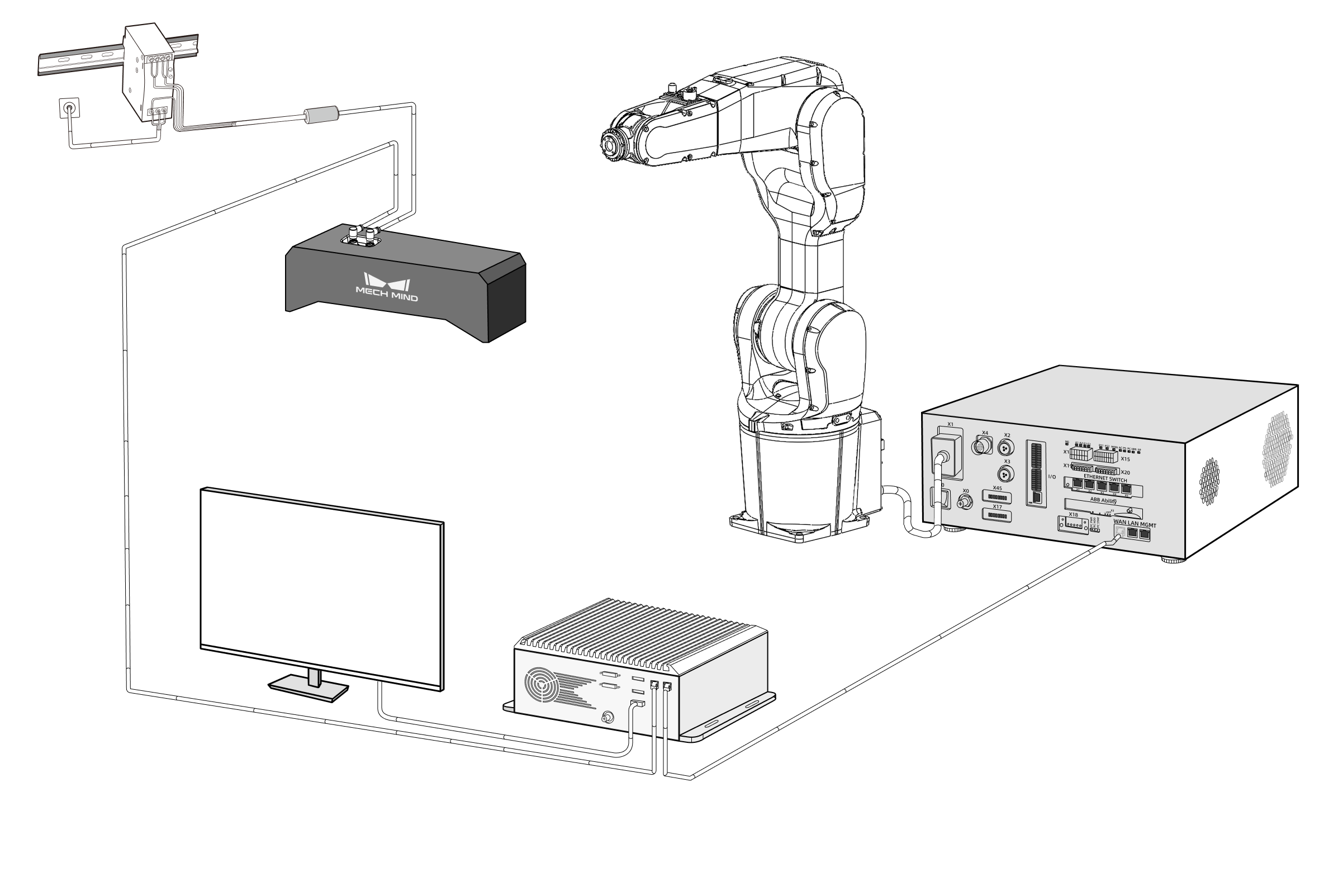
Reliez la caméra et le robot à deux ports Ethernet distincts de l’IPC, chaque appareil recevant une adresse IP dans un sous-réseau différent. Si un seul port Ethernet est utilisé pour connecter à la fois la caméra et le robot, ils doivent être connectés via un commutateur ou un routeur, et l’IPC, la caméra et le robot doivent se trouver sur le même sous-réseau. |
Connecter l’IPC et la caméra, et l’IPC et le contrôleur du robot
-
Branchez l’autre extrémité du câble Ethernet connecté à la caméra sur un port Ethernet de l’IPC.
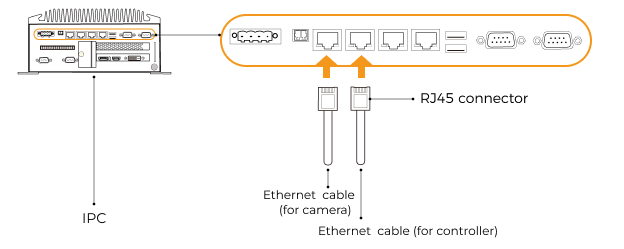
-
Utilisez un câble Ethernet RJ45-à-RJ45 pour brancher une extrémité sur le port Ethernet du contrôleur du robot et l’autre sur un port Ethernet de l’IPC.
Définir les adresses IP sur l’IPC
-
Sélectionnez sur l’IPC. La page Connexions réseau s’affiche.
-
Cliquez avec le bouton droit sur le port Ethernet connecté à la caméra, puis sélectionnez Renommer pour renommer le port Ethernet, par exemple « Vers_caméra ».
-
Cliquez avec le bouton droit sur le port Ethernet connecté à la caméra, puis sélectionnez Propriétés pour accéder à la page Propriétés Ethernet.
-
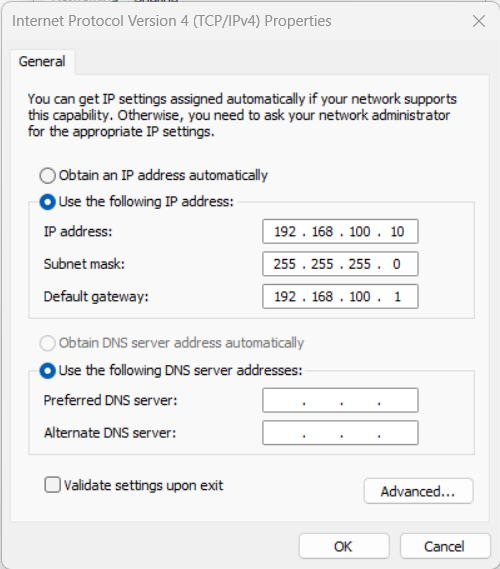
Cochez la case Protocole Internet version 4 (TCP/IPv4), puis cliquez sur le bouton Propriétés pour accéder à la page Propriétés du Protocole Internet version 4 (TCP/IPv4).
-
Sélectionnez l’option Utiliser l’adresse IP suivante, définissez l’Adresse IP sur « 192.168.100.10 », le Masque de sous-réseau sur « 255.255.255.0 » et la Passerelle par défaut sur « 192.168.100.1 », puis cliquez sur le bouton OK.
-
Répétez les étapes 2 à 5 pour renommer le port Ethernet connecté au contrôleur du robot (par exemple, « Vers_robot »), et définissez l’adresse IP de ce port Ethernet. Par exemple, l’adresse IP de ce port Ethernet est « 192.168.200.10 ».
L’adresse IP du robot et celle du port Ethernet de l’IPC connecté au contrôleur du robot doivent se trouver sur le même sous-réseau.
Définir l’adresse IP de la caméra
-
Double-cliquez sur
 sur le bureau de l’IPC pour ouvrir et exécuter Mech-Eye Viewer.
sur le bureau de l’IPC pour ouvrir et exécuter Mech-Eye Viewer. -
Sélectionnez la caméra dans la liste des caméras et survolez la caméra avec le curseur. Cliquez sur
 pour ouvrir la boîte de dialogue Configuration IP.
pour ouvrir la boîte de dialogue Configuration IP.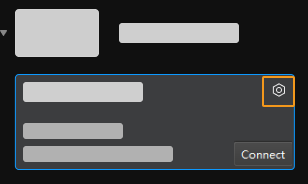
Si la caméra ne peut pas être trouvée ou connectée, veuillez consulter Dépannage de la caméra.
-
Dans la zone Configuration IP, sélectionnez l’option Définir comme IP statique et définissez la Classe d’adresse IP, l’Adresse IP et le Masque de sous-réseau selon l’environnement réseau réel. Par exemple, dans la figure suivante, les paramètres ci-dessus sont définis sur « Type C 192.168.x.x », « 192.168.20.116 » et « 255.255.255.0 ». Cliquez ensuite sur le bouton Appliquer.
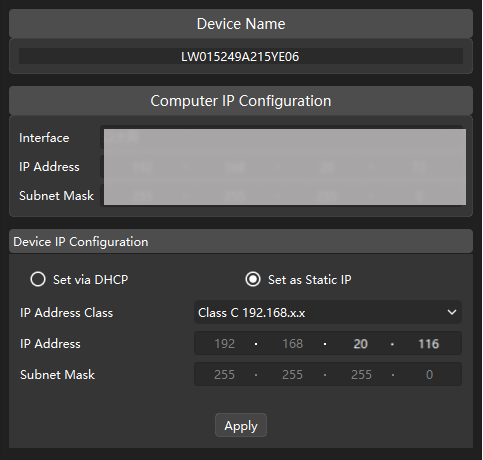
|
L’adresse IP de la caméra et celle du port Ethernet de l’IPC connecté à la caméra doivent se trouver sur le même sous-réseau. |
Tester la connectivité réseau
-
Appuyez sur Win + R pour ouvrir la boîte de dialogue Exécuter.
-
Saisissez
cmddans la boîte de dialogue Ouvrir, puis cliquez sur OK. -
Tapez ping XXX.XXX.XX.XX dans la fenêtre d’invite de commandes et appuyez sur la touche Entrée pour exécuter la commande.
Remplacez XXX.XXX.XX.XX par l’adresse IP réelle de la caméra/du robot.
Si la connectivité réseau est normale, vous devriez recevoir la réponse suivante :
Envoi d'une requête ping vers XXX.XXX.XX.XX avec 32 octets de données:
Réponse de XXX.XXX.XX.XX: octets=32 temps<1ms TTL=128
Réponse de XXX.XXX.XX.XX: octets=32 temps<1ms TTL=128
Réponse de XXX.XXX.XX.XX: octets=32 temps<1ms TTL=128Confirmer la qualité des images capturées
Après avoir vérifié la connectivité réseau entre l’IPC et la caméra et le robot, et confirmé que le logiciel est à la dernière version, veuillez confirmer que le système de vision capture les images normalement et que la qualité des images répond aux exigences :
-
Placez les pièces au centre du champ de vision (FOV) de la caméra et assurez-vous que les pièces situées en bord et en haut se trouvent toutes dans le FOV.
-
Ouvrez et démarrez Mech-Eye Viewer en double-cliquant sur
sur le bureau de l’IPC. -
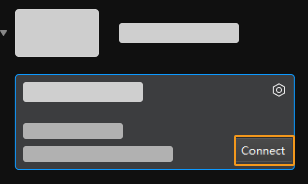
Sélectionnez la caméra dans la liste des caméras et cliquez sur le bouton Connecter.
-
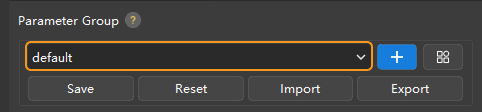
Après la connexion de la caméra, sélectionnez le groupe de paramètres selon le besoin réel.
À partir du firmware 2.2.0, des modèles de groupes de paramètres intégrés adaptés à différents scénarios ou objets cibles ont été ajoutés aux caméras. Après avoir sélectionné le groupe de paramètres qui correspond à votre situation réelle, vous n’avez besoin que d’ajuster légèrement les valeurs des paramètres pour obtenir des données satisfaisantes, simplifiant ainsi le processus de réglage des paramètres. Pour plus de détails, consultez Modèles de groupes de paramètres.
-
Après avoir sélectionné un groupe de paramètres, cliquez sur le bouton Capturer une fois.
-
Assurez-vous que les images capturées respectent les normes suivantes.
-
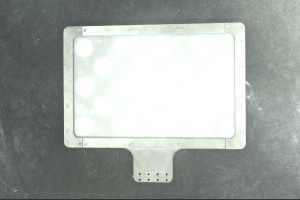
Image 2D : l’image 2D ne doit pas être notablement surexposée ou sous-exposée ; les caractéristiques de surface de l’objet cible doivent être clairement visibles.
Normale Surexposée Sous-exposée 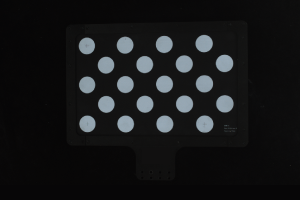

-
Carte de profondeur et nuage de points : dans la carte de profondeur et le nuage de points, les données correspondant à l’objet cible doivent être complètes.
Nuage de points complet Nuage de points incomplet Nuage de points incomplet 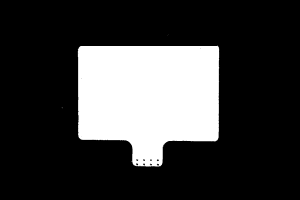
-
|