Améliorer et valider les paramètres extrinsèques
Cette section explique comment améliorer et valider la précision des paramètres extrinsèques.
Améliorer la précision des paramètres extrinsèques
Pendant la calibration main-œil, vous pouvez prendre les mesures suivantes pour améliorer la précision des paramètres extrinsèques (résultats de calibration):
Avant la calibration :
-
Assurez-vous que la base du robot est solidement fixée.
-
Assurez une grande précision des paramètres intrinsèques de la caméra. Il est recommandé d’utiliser la plaque de calibration pour vérifier les paramètres intrinsèques à différentes hauteurs dans différentes zones.
-
Assurez-vous que la précision absolue du robot a été vérifiée et qu’elle répond aux exigences du projet.
-
(Recommandé) Préchauffez la caméra pendant au moins 30 minutes avant la calibration ; pour les applications à haute précision, préchauffez la caméra pendant au moins 45 minutes. Le processus de préchauffage et de mise en température peut être effectué en alimentant la caméra ou en capturant des images en continu.
Pendant la calibration :
-
Lorsque la méthode « poses aléatoires multiples de la plaque de calibration » est utilisée pour la calibration dans la configuration ETH, assurez-vous que la plaque de calibration est solidement fixée.
-
Si le robot effectue le picking avec un préhenseur très lourd,activez la compensation de charge côté robot et calibrez les paramètres extrinsèques avec le préhenseur.
-
Si la distance de travail de la caméra dépasse 1.5 m, activez le Lissage de surface pour le groupe de paramètres « calib » utilisé pour la calibration.
-
Réduisez la vitesse du robot et définissez un temps d’attente plus long lors de la collecte des données de calibration afin d’éviter des vibrations du robot perceptibles.
-
Effectuez la calibration strictement selon la procédure de calibration main-œil.
Afficher les résultats de la calibration des paramètres extrinsèques
Afficher le rapport de calibration des paramètres extrinsèques
Pour les scénarios de calibration utilisant la méthode « poses aléatoires multiples de la plaque de calibration », vous pouvez cliquer sur le bouton Afficher la calibration des paramètres extrinsèques après avoir calculé les paramètres extrinsèques. Le rapport de calibration des paramètres extrinsèques sera automatiquement affiché après sa génération.
Si les résultats de calibration des vérifications de la convention des angles d’Euler, de la précision de la caméra et de la précision absolue du robot sont tous « Réussite » (ou s’il n’y a pas d’erreur significative), alors les paramètres extrinsèques sont calibrés avec succès et peuvent être utilisés.
Si l’une des vérifications échoue, veuillez suivre les recommandations fournies dans le rapport et recalibrez les paramètres extrinsèques jusqu’à ce que la vérification soit réussie.
Afficher le nuage de points d’erreur dans la visionneuse du nuage de points
Pour la calibration utilisant la méthode « TCP touch », vous pouvez vérifier l’erreur du nuage de points dans la visionneuse du nuage de points afin de voir si le résultat de calibration est utilisable.
Après avoir calculé les paramètres extrinsèques, cliquez sur Visionneuse du nuage de points à droite pour afficher le nuage de points d’erreur. Le nuage de points d’erreur montre l’écart entre la valeur calculée et la valeur réelle des cercles sur la plaque de calibration.
En général, les normes d’erreur de calibration acceptables dans le nuage de points sont les suivantes:
-
Pour les projets courants, tous les points de données doivent avoir des erreurs inférieures à 3 mm (< 3 mm: 100%).
-
Pour les projets haute précision, tous les points de données doivent avoir des erreurs inférieures à 2 mm (< 2 mm: 100%).
-
Pour les projets de palettisation et de dépalettisation, tous les points de données doivent avoir des erreurs inférieures à 5 mm (< 5 mm: 100%).
Les normes ci-dessus sont uniquement à titre de référence. Veuillez suivre l’exigence de précision spécifique du projet.
Valider la précision des paramètres extrinsèques
Valider la précision des paramètres extrinsèques dans la configuration ETH
Après avoir calculé les paramètres extrinsèques, vous pouvez utiliser l’outil « Analyser l’erreur des paramètres extrinsèques dans la configuration ETH » pour évaluer si les résultats de calibration sont valides.
Les instructions détaillées sont les suivantes :
-
Dans l’étape Calculer les paramètres extrinsèques, cliquez sur Précision des paramètres extrinsèques dans la zone Outils complémentaires, puis sélectionnez Analyser l’erreur des paramètres extrinsèques dans la configuration ETH dans la fenêtre contextuelle Analyse des erreurs.
-
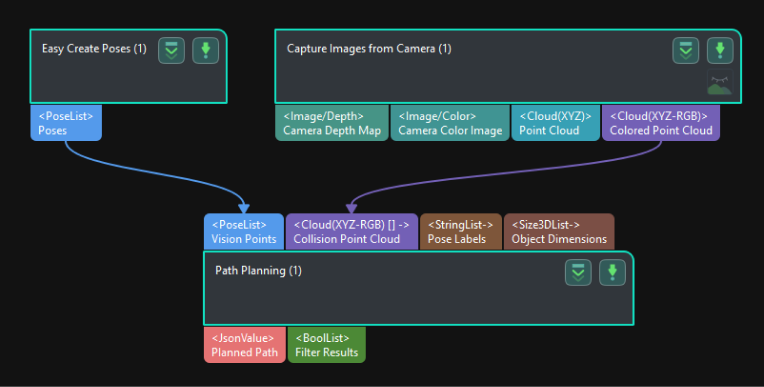
Créez un nouveau projet pour obtenir les poses de la plaque de calibration. Le projet à construire est montré ci-dessous:
-
Synchronisez la pose du robot réel et obtenez le nuage de points de la scène contenant le nuage de points de la plaque de calibration.
-
Sélectionnez l’étape Planification de trajectoire dans le projet, et cliquez sur le bouton Ouvrir l’éditeur sur le panneau Paramètres de l’étape pour ouvrir la zone de simulation 3D.
-
Synchronisez la pose du robot réel avec celle du robot simulé dans l’étape « Planification de trajectoire », afin que les poses du robot simulé dans la zone de simulation 3D et du robot réel soient identiques.
-
Cliquez sur le bouton Simuler pour visualiser le nuage de points de la scène contenant la plaque de calibration. (Veuillez ignorer le message d’erreur après avoir cliqué sur Simuler.)
-
-
Créez un TCP virtuel sur la plaque de calibration.
-
Ajoutez un outil terminal aux ressources dans l’outil de planification de trajectoire.
-
Vérifiez la visualisation de l’outil terminal dans la zone de simulation 3D, et ajustez les paramètres pour que le TCP coïncide avec un centre de cercle sur la plaque de calibration (l’axe de la pose doit coïncider avec la croix dans le cercle et le plan XOY doit être étroitement aligné avec le plan de calibration).
-
Saisissez un nom et cliquez sur OK pour terminer la création du TCP virtuel.
-
-
Vérifiez les paramètres extrinsèques à d’autres positions dans l’espace de travail.
-
Déplacez le robot réel à l’aide du pupitre d’enseignement vers d’autres positions dans l’espace de travail.
-
Synchronisez la pose du robot réel avec celle du robot simulé dans l’étape « Planification de trajectoire », afin que les poses du robot simulé dans la zone de simulation 3D et du robot réel soient identiques.
-
Cliquez sur le bouton Simuler pour obtenir le nouveau nuage de points de la scène contenant la plaque de calibration.
-
Vérifiez si le TCP virtuel ajouté à l’étape précédente coïncide avec le centre du cercle sur la plaque de calibration.
-
Si le TCP simulé coïncide généralement avec le centre du cercle de la plaque de calibration, le résultat de calibration est valide.
Valider la précision des paramètres extrinsèques dans la configuration EIH
Après avoir calculé les paramètres extrinsèques, vous pouvez utiliser l’outil « Analyser l’erreur des paramètres extrinsèques dans la configuration EIH » pour évaluer si les résultats de calibration sont valides.
Les instructions détaillées sont les suivantes :
-
Dans l’étape Calculer les paramètres extrinsèques, cliquez sur Précision des paramètres extrinsèques dans la zone Outils complémentaires, puis sélectionnez Analyser l’erreur des paramètres extrinsèques dans la configuration EIH dans la fenêtre contextuelle Analyse des erreurs.
-
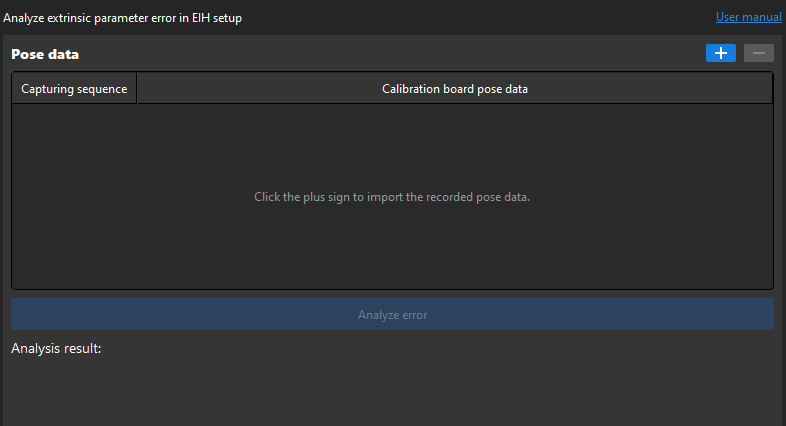
Prenez connaissance des instructions d’évaluation de l’erreur des paramètres extrinsèques dans la configuration EIH, puis cliquez sur le bouton Suivant.
-
Cliquez sur + pour ajouter plusieurs ensembles de poses de la plaque de calibration.
-
Cliquez sur le bouton Analyser l’erreur pour afficher le résultat.
Si l’erreur répond aux exigences de précision de prélèvement, le résultat de calibration est valide.