Processus de conception des préhenseurs
Cette section présente le processus général de conception des préhenseurs.
Avant la conception : examiner les informations de production
Avant de concevoir un préhenseur, il convient d’examiner les informations de production pertinentes, telles que les informations de base sur les objets cibles et l’état des matériaux entrants. Les détails sont les suivants.
-
Clarifier les informations de base sur les objets cibles
-
Poids de l’objet cible
-
Dimensions de l’objet cible
-
Matériau de l’objet cible
-
Processus de fabrication de l’objet cible
-
-
Confirmer l’état des matériaux entrants des objets cibles
-
Vérifier le type de support (palette, bac peu profond, bac profond ou rayonnage), ainsi que la forme du bac (treillis, plat ou autre) et ses dimensions.
-
Vérifier si le matériau entrant affecte la préhension.
-
Déterminer s’il existe des intercalaires entre différentes couches des objets cibles et si ces intercalaires doivent être prélevés.
-
Confirmer si une intervention manuelle pendant la préhension est acceptable.
-
-
Clarifier les exigences de placement des objets cibles
-
Si les objets cibles peuvent être déposés librement sans contrainte d’orientation ou de pose, la conception du préhenseur peut rester relativement simple.
-
Si les objets cibles doivent être déposés selon des angles, orientations ou poses spécifiques, des dispositifs supplémentaires de basculement ou de rotation peuvent être nécessaires.
-
Si les processus en aval exigent une grande précision de placement, la conception du préhenseur peut être plus complexe, nécessitant potentiellement des dispositifs de positionnement secondaire.
-
-
Définir les exigences de temps de cycle de préhension
-
Le temps de cycle de préhension doit répondre aux exigences des processus amont, des processus aval ou aux exigences du client.
-
Le temps de cycle de préhension a un impact important sur la conception du préhenseur. En particulier, lorsque la vitesse de préhension est élevée, la stabilité doit être assurée.
-
Pendant la conception : définir les considérations de conception clés
Dans les applications pratiques, les préhenseurs peuvent être classés en préhenseurs à doigts, préhenseurs magnétiques et préhenseurs à vide. Lors de la conception, chaque type de préhenseur présente des considérations clés spécifiques, décrites ci-dessous.
Préhenseurs à doigts
Les préhenseurs à doigts sont recommandés lorsque la forme de l’objet cible ne se prête pas à une préhension par aspiration et ne peut pas être magnétisée. Ils conviennent aux objets cibles de forme complexe et permettent une préhension stable. La figure ci-dessous montre la préhension de petits anneaux avec un préhenseur à deux doigts.

Les points clés de la conception des préhenseurs à doigts sont les suivants :
-
Le préhenseur doit être choisi en fonction du poids de l’objet cible. Veiller à maintenir une marge de sécurité adéquate tout en satisfaisant le taux de réussite requis et la précision de la préhension, avec une force de préhension du préhenseur dépassant le minimum nécessaire pour retenir l’objet cible d’une quantité suffisante afin de gérer les incertitudes et de garantir une préhension sûre et fiable.
-
Concevoir plusieurs méthodes de préhension, ne se limitant pas à l’appui interne ou au serrage externe, afin d’améliorer le taux de réussite.
-
Pour éviter de rayer l’objet cible, s’assurer que la dureté de tout composant du préhenseur en contact avec l’objet est inférieure à celle du matériau de l’objet.
-
Envisager d’ajouter un moletage sur les doigts afin d’augmenter le frottement.
-
Envisager l’installation de capteurs de détection de chute à des positions appropriées sur le préhenseur, afin d’ajouter une capacité de détection de chute et de prévenir les problèmes causés par la chute d’objets cibles.
-
Lorsqu’un objet cible comporte plusieurs points de préhension, la conception des doigts doit tenir compte de tous les points de préhension. Un jeu minimal de 2 mm doit être maintenu sur un côté pour éviter les collisions lors de la préhension.
|
Il est recommandé de concevoir les points de préhension au centre de gravité de l’objet cible dans Mech-Vision afin d’éviter le basculement ou la chute après la préhension. |
Préhenseurs magnétiques
Les préhenseurs magnétiques conviennent aux objets cibles métalliques disposés de manière serrée, rendant difficile l’insertion du préhenseur par les arêtes ou les côtés, de sorte que seule la surface supérieure puisse être contactée. Les préhenseurs magnétiques adhèrent directement à la surface supérieure de l’objet cible, assurant une préhension stable et efficace.

Les points clés de la conception des préhenseurs magnétiques sont les suivants :
-
Sélectionner un préhenseur électromagnétique approprié en fonction du poids de l’objet cible, afin d’éviter une force magnétique excessive qui soulèverait plusieurs objets à la fois, ou une force insuffisante qui entraînerait la chute de l’objet après sa prise.
-
Concevoir plusieurs positions de préhension peut améliorer les chances de réussite.
-
Envisager l’installation de capteurs de détection de chute à des positions appropriées sur le préhenseur, afin d’ajouter une capacité de détection de chute et de prévenir les problèmes causés par la chute d’objets cibles.
-
Pour les électroaimants classiques, il est recommandé que la force magnétique soit d’au moins dix fois le poids de l’objet cible ; pour les aimants électro-permanents, un facteur de sécurité de 3–5 doit être choisi en fonction de l’état de surface de l’objet cible.
|
Il est recommandé de concevoir les points de préhension au centre de gravité de l’objet cible dans Mech-Vision afin d’éviter le basculement ou la chute après la préhension. |
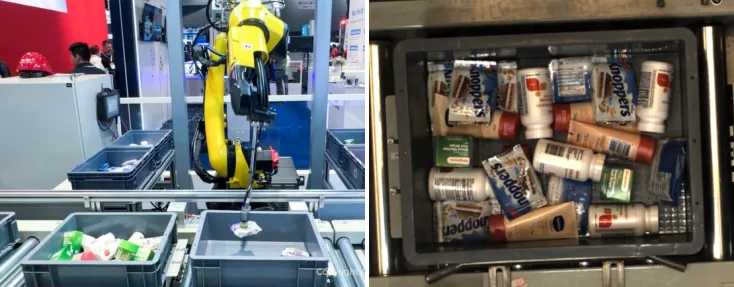
Préhenseurs à vide
Les préhenseurs à vide sont recommandés lorsque les matériaux entrants contiennent des types mixtes d’objets cibles, que les surfaces sont lisses et non poreuses, que la zone de préhension peut couvrir entièrement l’objet, et qu’une haute précision de préhension n’est pas requise. La figure ci-dessous montre la préhension de produits.
Les points clés de la conception des préhenseurs à vide sont les suivants :
-
Sélectionner le modèle d’élément de vide en fonction du poids, de la position de préhension et de l’état de surface de l’objet cible.
-
Concevoir plusieurs points de ventouse afin d’améliorer le taux de réussite de la préhension.
-
Sélectionner des ventouses appropriées selon les caractéristiques de surface de l’objet cible (par exemple, aspect lisse, présence de trous de fuite d’air) afin d’assurer une fixation stable.
-
Envisager l’installation de capteurs de détection de chute à des positions appropriées sur le préhenseur, afin d’ajouter une capacité de détection de chute et de prévenir les problèmes causés par la chute d’objets cibles.
-
Prêter une attention particulière au risque de basculement après la préhension lors de la définition des marges de sécurité, et éviter une force d’aspiration excessive susceptible d’endommager l’objet cible.
|
Il est recommandé de concevoir les points de préhension au centre de gravité de l’objet cible dans Mech-Vision afin d’éviter le basculement ou la chute après la préhension. |