Évaluer si l’erreur des paramètres extrinsèques devient plus importante
Cette section vous explique comment évaluer les erreurs des paramètres extrinsèques.
Évaluer si l’erreur des paramètres extrinsèques devient plus importante dans la configuration ETH
Avant d’évaluer les paramètres extrinsèques, veuillez vous assurer que la mire de calibration est fixée solidement sur l’articulation terminale du robot. Après avoir monté la mire de calibration, sélectionnez menu: Boîte à outils[Outil d’analyse des erreurs] dans la barre de menus, puis sélectionnez menu: Paramètre extrinsèque[Analyser l’erreur de paramètre extrinsèque dans la configuration ETH] dans la fenêtre Analyse des erreurs.
La procédure pour évaluer les paramètres extrinsèques à l’aide de l’outil « Analyser l’erreur de paramètre extrinsèque dans la configuration ETH » est la suivante :
-
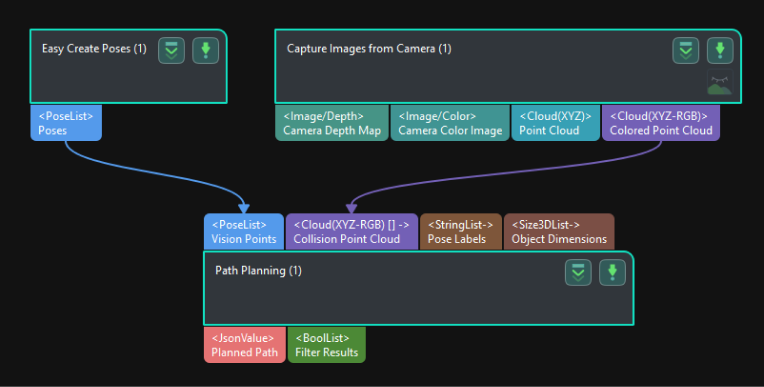
Créez un nouveau projet pour obtenir les poses de la mire de calibration. Le projet à créer est présenté ci-dessous:
-
Synchronisez la pose du robot réel et obtenez le nuage de points de la scène contenant le nuage de points de la mire de calibration.
-
Sélectionnez l’étape Planification de trajectoire dans le projet, et cliquez sur le bouton Ouvrir l’éditeur sur le panneau Paramètres de l’étape pour ouvrir la zone de simulation 3D.
-
Synchronisez la pose du robot réel avec celle du robot simulé dans l’étape « Planification de trajectoire », afin que les poses du robot simulé dans la zone de simulation 3D et du robot réel soient identiques.
-
Cliquez sur le bouton Simuler pour visualiser le nuage de points de la scène contenant la mire de calibration. (Veuillez ignorer le message d’erreur après avoir cliqué sur Simuler.)
-
-
Créez un TCP virtuel sur la mire de calibration.
-
Ajoutez un effecteur terminal aux ressources dans l’outil de planification de trajectoire.
-
Vérifiez la visualisation de l’effecteur terminal dans la zone de simulation 3D, et ajustez les paramètres pour que le TCP coïncide avec le centre d’un cercle sur la mire de calibration (l’axe de la pose doit coïncider avec la croix dans le cercle et le plan XOY doit être étroitement aligné avec le plan de calibration).
-
Saisissez un nom et cliquez sur OK pour terminer la création du TCP virtuel.
-
-
Vérifiez les paramètres extrinsèques à d’autres positions dans l’espace de travail.
-
Déplacez le robot réel à l’aide du boîtier d’enseignement vers d’autres positions dans l’espace de travail.
-
Synchronisez la pose du robot réel avec celle du robot simulé dans l’étape « Planification de trajectoire », afin que les poses du robot simulé dans la zone de simulation 3D et du robot réel soient identiques.
-
Cliquez sur le bouton Simuler pour obtenir le nouveau nuage de points de la scène contenant la mire de calibration.
-
Vérifiez si le TCP virtuel ajouté à l’étape précédente coïncide avec le centre du cercle sur la mire de calibration.
-
Si l’écart entre le TCP virtuel et le centre du cercle de la mire de calibration est important, l’erreur des paramètres extrinsèques est élevée et vous devez ré-étalonner les paramètres extrinsèques.
Évaluer si l’erreur des paramètres extrinsèques devient plus importante dans la configuration EIH
Avant d’évaluer les paramètres extrinsèques, veuillez vous assurer que la mire de calibration est placée au centre du champ de vision de la caméra. Après avoir positionné la mire de calibration, vous pouvez utiliser l’outil « Analyser l’erreur de paramètre extrinsèque dans la configuration EIH » dans l’interface Étalonnage de la caméra pour évaluer les erreurs de paramètres extrinsèques.
La procédure pour évaluer les paramètres extrinsèques à l’aide de l’outil « Analyser l’erreur de paramètre extrinsèque dans la configuration EIH » est la suivante :
-
Sélectionnez un projet dans la liste des projets, puis cliquez sur le bouton Étalonnage de la caméra (Standard) dans la barre de menus.
-
Dans la fenêtre Configuration avant l’étalonnage, sélectionnez le bouton radio Charger les paramètres d’étalonnage, sélectionnez les paramètres qui ont été étalonnés pour le projet, puis cliquez sur le bouton Suivant.
-
Dans la fenêtre Sélectionner l’utilisation des paramètres, sélectionnez le bouton radio Continuer à travailler avec la caméra étalonnée, puis cliquez sur le bouton Suivant.
Statut de la caméra doit être affiché comme connecté. -
Dans la fenêtre Sélectionner la tâche d’étalonnage, sélectionnez le bouton radio Recalculer les paramètres extrinsèques, laissez la case à cocher Charger les données d’étalonnage sélectionnée, puis cliquez sur le bouton Étalonner. La fenêtre Étalonnage s’affichera.
-
À l’étape Calculer les paramètres extrinsèques, cliquez sur Précision des paramètres extrinsèques dans la zone Outils complémentaires, puis sélectionnez Analyser l’erreur de paramètre extrinsèque dans la configuration EIH dans la fenêtre contextuelle Analyse des erreurs.
-
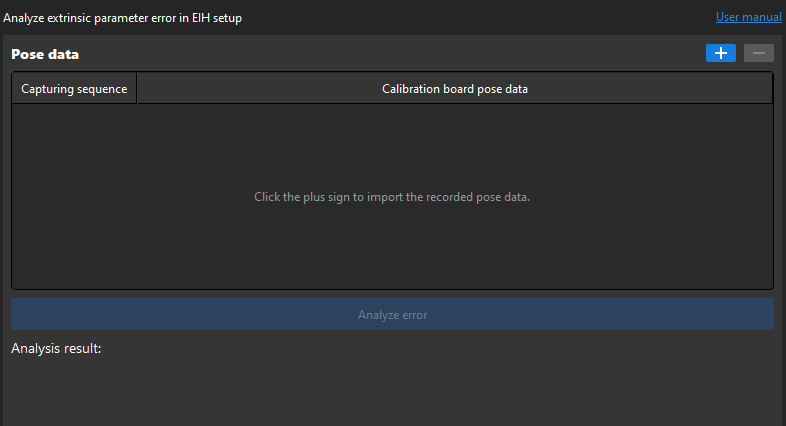
Prenez connaissance des instructions sur l’évaluation de l’erreur des paramètres extrinsèques dans la configuration EIH, puis cliquez sur le bouton Suivant.
-
Cliquez sur + pour ajouter plusieurs ensembles de poses de la mire de calibration.
-
Cliquez sur le bouton Analyser l’erreur pour afficher le résultat.
Si la valeur de l’erreur augmente (par rapport à la valeur d’erreur dans la phase de déploiement de l’application), alors les paramètres extrinsèques doivent être ré-étalonnés.