Conception structurelle des préhenseurs à vide
Cette section prend les préhenseurs à vide comme exemple pour présenter la conception structurelle des préhenseurs à vide dans l’industrie logistique, y compris la sélection des composants standard, la conception du système de vide et la conception d’autres accessoires.
Conception de la structure principale
Lors de la conception de la structure principale du préhenseur à vide, prêter attention aux points suivants.
-
Garantir une structure principale solide et rigide
La structure principale du préhenseur à vide doit être robuste. Effectuer des simulations de contraintes si nécessaire. Pour certaines pièces porteuses, les profilés en aluminium à faible rigidité ne sont pas recommandés.

-
Ajouter un dispositif d’amortissement
L’ajout d’amortisseurs dans la direction verticale du préhenseur à vide peut protéger à la fois l’objet cible et le préhenseur. Lors de la conception d’un préhenseur à vide de grande taille, il faut également considérer qu’une force unilatérale peut empêcher le préhenseur de retrouver sa forme initiale après compression.

-
Prendre en compte les effets de rotation
Lorsqu’une pose spécifique de prise ou de dépose est requise, il est généralement indésirable que l’objet cible tourne pendant qu’il est maintenu par le préhenseur à vide. Par conséquent, l’adaptateur de préhenseur à vide choisi doit intégrer une fonction anti-rotation. Si la surface d’aspiration de l’objet cible présente un angle d’inclinaison inconnu, un adaptateur doit être ajouté à l’extrémité du préhenseur à vide pour s’accommoder de cet angle d’inclinaison.

Sélection des ventouses
Lors du choix des ventouses, veiller aux points suivants.
-
Durée de vie des ventouses
Les ventouses à soufflet, également appelées ventouses accordéon, ont généralement une durée de vie plus longue que les ventouses en mousse.
-
Inertie des ventouses
En général, plus l’objet saisi par la ventouse est lourd, plus l’inertie est grande, ce qui peut affecter négativement les performances de mouvement du robot lorsqu’il porte le préhenseur à vide.
-
Matériau des ventouses
Les ventouses souples épousent plus facilement la surface des cartons, c’est pourquoi les ventouses en matériau souple (par ex., ventouses à soufflet en silicone) sont généralement privilégiées.
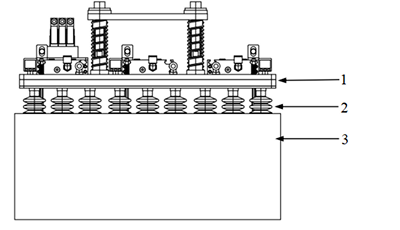
Toutefois, si le carton est lourd, la ventouse souple peut ne pas saisir le carton de manière sûre. Dans ce cas, il convient de choisir une ventouse rigide.
Les figures ci-dessous montrent un tel cas. 1 désigne le corps du préhenseur à vide, 2 l’embout de ventouse et 3 le carton.
Sélection du système de vide
Lors de la conception du système de vide, prêter attention aux points suivants.
-
Prendre en compte le débit d’air du système de vide
Lorsqu’un grand débit d’air est requis, un ventilateur est généralement choisi. Pour assurer un flux équilibré via le clapet anti-retour à l’intérieur du préhenseur et améliorer les performances globales, il est recommandé d’installer une soupape de décharge sur le ventilateur.
-
Prendre en compte les fuites de gaz
En présence d’une fuite importante de gaz comprimé, la force d’aspiration diminue de manière significative. Dans ce cas, il faut améliorer les performances de la source de vide et augmenter de façon appropriée la section efficace des conduites d’alimentation en air afin de renforcer la capacité d’aspiration.
-
Prendre en compte les facteurs influençant la force d’aspiration
La distance entre le générateur de vide et la ventouse, ainsi que la dimension de la tubulure de connexion, peuvent affecter la force d’aspiration réelle de la ventouse. Il est généralement recommandé de maintenir la distance entre le générateur de vide et le préhenseur à vide aussi courte que possible et de choisir une tubulure de diamètre approprié afin de réduire les pertes de charge.
-
Prendre en compte les situations extrêmes
En cas de perte d’alimentation ou d’autres conditions extrêmes, il convient de sélectionner des vannes d’alimentation normalement fermées ou des vannes dotées d’une fonction de maintien. Lorsqu’une vanne de rupture de vide est présente, une vanne de régulation (étrangleur) doit être utilisée pour ajuster le débit de rupture du vide, afin d’améliorer la contrôlabilité et la stabilité du processus de relâchement du vide.
Conception des capteurs
Lors de la conception des capteurs, prêter attention aux points suivants.
-
Définir correctement la position et le nombre de capteurs de détection de chute
Afin de s’adapter aux diverses tailles de cartons et aux méthodes de prise, définir les positions et le nombre de capteurs de détection de chute (capteur photoélectrique + palpeur) selon les besoins réels.
La figure ci-dessous montre des méthodes courantes de prise de cartons, où 1 est le carton, 2 la position du capteur et 3 la ventouse.
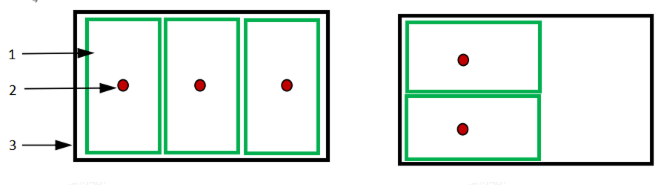
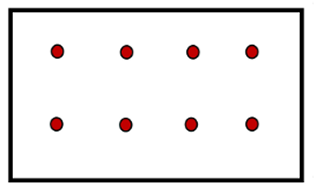
L’agencement des positions et du nombre de capteurs doit tenir compte des deux méthodes de prise illustrées ci-dessus, comme montré sur la figure ci-dessous.
-
Prendre en compte les situations extrêmes
Lors de l’implantation des capteurs, prendre en compte de manière globale les trajets d’aspiration du préhenseur à vide et la zone de couverture des plus petits cartons. Par exemple, dans certains cas, les capteurs peuvent détecter le bord d’un carton ; si le robot se déplace légèrement pendant le fonctionnement, cela peut provoquer de fausses détections. Pour réduire ce risque, la distance entre les deux capteurs peut être légèrement diminuée afin d’améliorer la stabilité de la détection.

-
Surveiller la durée de vie des capteurs
Pour les composants de capteur en mouvement relatif, prêter attention à leur durée de vie. Une optimisation peut être obtenue par la conception structurelle et le choix des matériaux ; par exemple, les pièces mobiles du palpeur peuvent être en acier inoxydable afin d’améliorer la résistance à l’usure et la fiabilité. De plus, il est recommandé que la tôle de montage du capteur ait une épaisseur d’au moins 3 mm afin d’assurer la résistance et la stabilité du montage.

Conception du lecteur de codes-barres
Lors de la conception du lecteur de codes-barres, prêter attention aux points suivants.
-
Prendre en compte l’emplacement du code-barres
Étant donné que le préhenseur à vide se comprime légèrement lors de la prise, il est généralement nécessaire de maintenir une certaine distance entre le code-barres et le dessus du carton lors de la lecture du code après que le robot a saisi le carton. La distance recommandée est de 70 mm à 150 mm. Sinon, le taux de réussite de lecture du code-barres peut être affecté pour la pose de prise illustrée sur la figure ci-dessous.

-
Prendre en compte la qualité d’impression du code-barres
Dans l’industrie logistique, les codes-barres 1D sont couramment utilisés, avec une précision typique de 0,2 mm à 0,5 mm. Pour garantir une lecture fiable, la qualité d’impression doit généralement atteindre au moins la classe B.
-
Privilégier la lecture dynamique
Dans les scénarios de prise de cartons à rythme soutenu, la lecture dynamique des codes-barres doit être utilisée autant que possible à la place de la lecture statique.
-
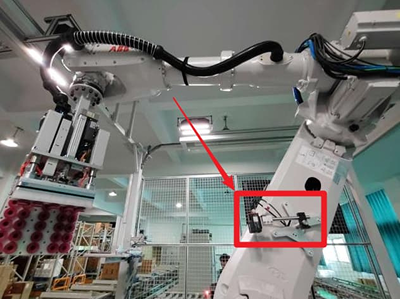
Déterminer la configuration de montage du lecteur de codes-barres
Les configurations de montage courantes des lecteurs de codes-barres sont illustrées sur la figure ci-dessous.
-
Montage fixe : Couramment utilisé à côté des lignes de production ou dans des scénarios où les robots coopèrent pour scanner des produits logistiques.

-
Monté sur l’effecteur terminal du robot : Permet des lectures avec plusieurs degrés de liberté et sous plusieurs poses. Lorsque la surface de l’objet cible est recouverte de matériau transparent, ou que les codes-barres doivent être lus à travers des matériaux tels que l’acrylique, éviter les sources lumineuses proches du code-barres susceptibles de provoquer des reflets et d’affecter la précision de lecture.
-
Monté sur le bras supérieur du robot : Cette méthode de montage intègre la lecture de codes au mouvement du robot, ce qui contribue à améliorer l’efficacité de production.
-
-
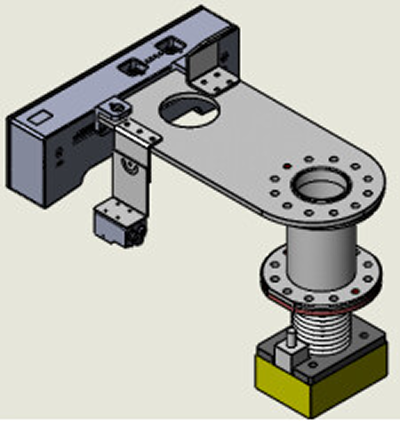
Prendre en compte la conception du support du lecteur de codes-barres
Le support du lecteur de codes-barres doit permettre des réglages dans plusieurs directions. En pratique, il peut être simplifié sur la base du support montré sur la figure ci-dessous.

Conception des autres accessoires
Lors de la conception des autres accessoires, prêter attention aux points suivants.
-
Longueur libre du tuyau d’air
La longueur libre du tuyau d’air doit être conçue en fonction des mouvements à six axes du robot afin d’éviter les pliures.

-
Cheminement du tuyau d’air
Le cheminement global du tuyau d’air doit être aussi fluide et flexible que possible. Comme le robot peut fonctionner à différents postes, le tuyau d’air peut être surélevé (comme illustré sur la figure ci-dessous), tout en tenant compte du débit et de la pression fournis par le ventilateur.

-
Protection contre l’abrasion du tuyau d’air
Dans les zones où le tuyau d’air est en contact direct avec le robot, le préhenseur à vide ou d’autres composants, il convient d’utiliser un tissu résistant à l’usure ou une gaine de protection afin d’allonger la durée de vie du tuyau.

-
Agencement des conduites
L’agencement du tuyau d’air et des autres conduites doit être considéré de manière globale pour prévenir les collisions et les frottements pendant le mouvement du robot, qui pourraient entraîner des fuites de gaz.

-
Durée de vie des composants
Pour les scénarios avec charges élevées ou impacts intermittents, la durée de vie des accessoires doit être soigneusement prise en compte afin de prévenir la rupture de composants pendant le mouvement du robot.
