Configuration des paramètres de détection de collisions
Afin d’éviter que le robot n’entre en collision avec d’autres objets lors du prélèvement, Mech-Viz est doté de la fonction de détection de collisions, permettant une détection flexible des collisions entre différents types d’objets.
Après avoir ajouté selon les besoins des modèles de collision pour les objets de la scène, les outils et les objets cibles, vous pouvez activer la détection de collisions dans le panneau Collisions.
Cette section présente la configuration des paramètres de détection de collisions dans des scénarios courants.
Palettisation et dépalletisation
Configuration recommandée
-
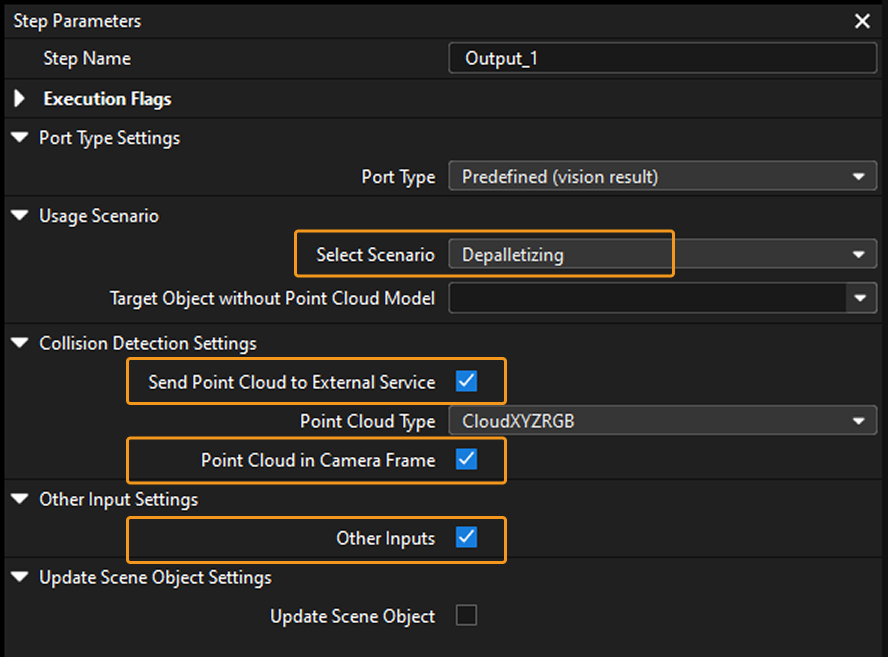
Dans le panneau des paramètres de l’étape Sortie dans Mech-Vision, sélectionnez Dépalletisation comme scénario et activez Envoyer le nuage de points vers un service externe, Nuage de points dans le repère caméra et Autres entrées.
-
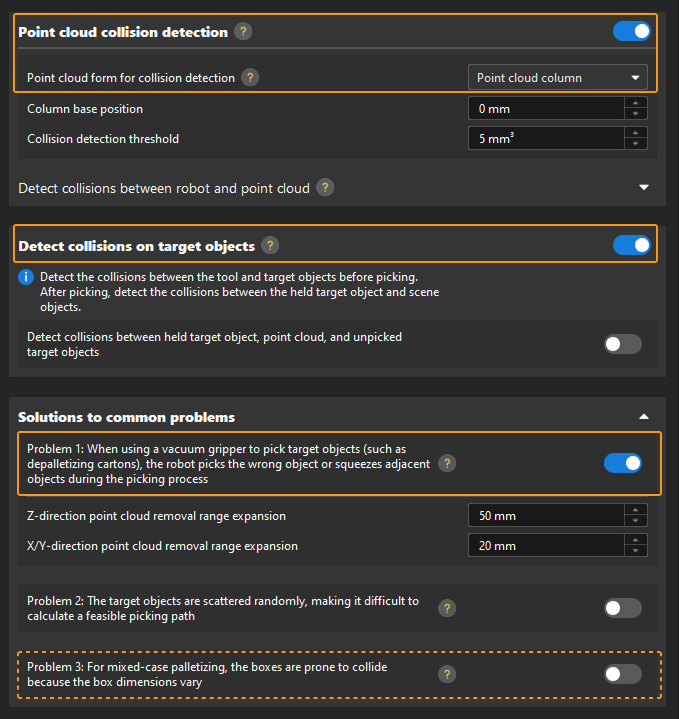
Dans le panneau fonctionnel Collisions de Mech-Viz, activez Détection de collisions du nuage de points et définissez Forme du nuage de points pour la détection de collisions sur Colonne de nuage de points.
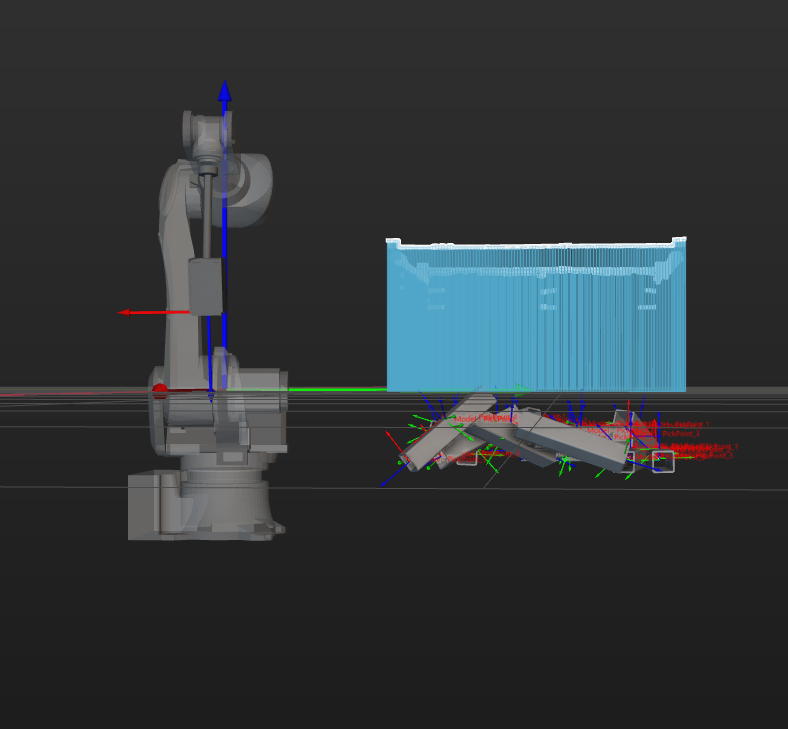
Lorsque Forme du nuage de points pour la détection de collisions est Colonne de nuage de points, Mech-Viz génère un modèle de collision en prolongeant le nuage de points de la surface supérieure du carton (comme point de départ) vers le bas le long de l’axe Z négatif du repère du monde jusqu’au sol (comme point d’arrivée) dans la zone de simulation 3D. L’utilisation d’une colonne de nuage de points permet d’éviter des collisions avec d’autres cartons lors de l’utilisation de préhenseurs à vide pour prélever des cartons, en particulier lorsque le préhenseur à vide aspire le carton par la face latérale.
Pour une description détaillée de Forme du nuage de points pour la détection de collisions, veuillez consulter Forme du nuage de points pour la détection de collisions.
Par défaut, l’origine du repère du monde de l’interface de simulation 3D coïncide avec celle du repère du robot. Si l’origine du repère du robot n’est pas sous la base mais se trouve sur le plan (qui coïncide avec le sol) où est situé l’axe 1 du robot, le modèle de collision formé par les colonnes de nuage de points ne sera pas assez haut. Dans ce cas, cliquez avec le bouton droit sur Sol dans l’arborescence des ressources du projet, puis ajustez la Hauteur du sol pour aligner le sol sur le plan du sol réel.
-
Dans le panneau Collisions de Mech-Viz, activez Détecter les collisions sur les objets cibles, et laissez Détecter les collisions entre l’objet cible tenu, le nuage de points et les objets cibles non pris désactivé.
Détectez les collisions entre le carton tenu et les autres objets de la scène lors des mouvements ultérieurs.
-
Activez l’interrupteur à droite de Problème 1. Pour des instructions spécifiques de configuration des paramètres, veuillez consulter Solutions aux problèmes courants.
-
Dans les scénarios de palettisation mixte, vous pouvez activer l’interrupteur à droite de Problème 3 pour ajouter une certaine épaisseur à la partie inférieure du modèle de collision du carton, et utiliser le modèle de collision épaissi pour la détection de collisions.
Prélèvement d’objets empilés aléatoirement
Configuration recommandée
-
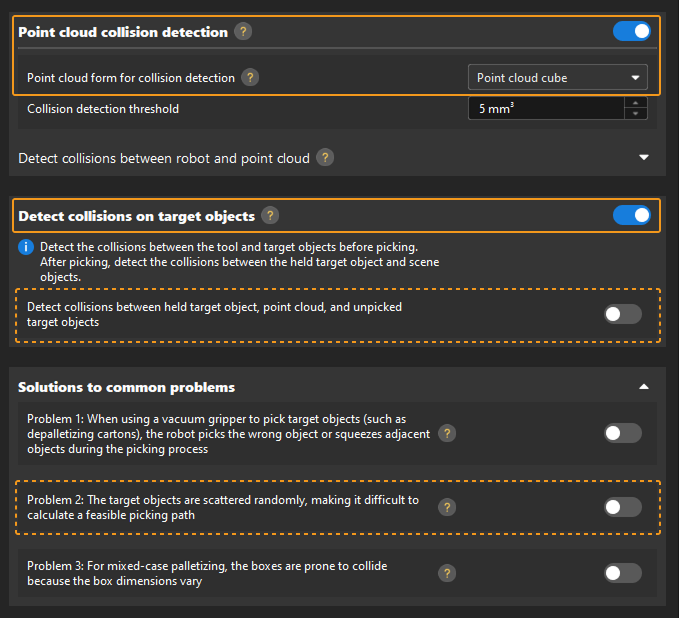
Dans le panneau fonctionnel Collisions de Mech-Viz, activez Détection de collisions du nuage de points et définissez Forme du nuage de points pour la détection de collisions sur Cube de nuage de points.
Évitez les collisions entre l’outil et les objets cibles réels grâce à la détection de collisions via le nuage de points.
-
Dans le panneau fonctionnel Collisions de Mech-Viz, activez Détecter les collisions sur les objets cibles. Si aucune collision n’est autorisée entre l’objet cible tenu et les objets cibles non pris, activez Détecter les collisions entre l’objet cible tenu, le nuage de points et les objets cibles non pris.
Détectez les collisions entre l’objet cible tenu et les autres objets de la scène lors des mouvements ultérieurs.
-
Si la situation réelle correspond à l’un des deux scénarios suivants, activez l’interrupteur à côté de Problème 2 sous Solutions aux problèmes courants.
-
De légères collisions entre l’outil et l’objet cible pendant le prélèvement sont autorisées.
-
Lorsque les objets cibles sont effectivement prélevables, mais que les nuages de points des objets cibles sont imbriqués les uns dans les autres ou imbriqués dans des objets de la scène tels que des bacs, le logiciel détecte des collisions et la planification de trajectoire échoue. Dans ce scénario, cliquez sur Séparer les paramètres pour définir séparément la Longueur de trajectoire exemptée de la détection de collisions avant et après le prélèvement.
Veuillez noter que la Longueur de trajectoire exemptée de la détection de collisions ne doit pas être trop longue afin d’éviter des collisions sévères.
-
Prélèvement d’objets disposés de manière ordonnée
Configuration recommandée
-
Dans le panneau fonctionnel Collisions de Mech-Viz, activez Détection de collisions du nuage de points et définissez Forme du nuage de points pour la détection de collisions sur Colonne de nuage de points.
Lorsque les objets cibles sont disposés de manière ordonnée, les colonnes de nuage de points sont plus adaptées à la détection de collisions via le nuage de points.
