Problèmes courants liés à la préhension dans des bacs profonds
Cette section présente les problèmes courants et leurs solutions lors de l’utilisation d’un préhenseur pour saisir des objets cibles dans un bac profond.
Conception inappropriée de la structure du préhenseur
-
Symptôme
Les dimensions du contour extérieur du préhenseur sont trop importantes, ce qui se traduit par une conception structurelle inappropriée. Lors de la saisie d’objets cibles de la couche inférieure dans le bac, le préhenseur peut entrer en collision avec le bac ou les objets, entraînant un taux de réussite inférieur aux attentes.

-
Solution
Lors de la conception du préhenseur, les points suivants doivent être pris en compte.
-
Prendre pleinement en compte la profondeur du bac afin d’assurer une préhension réussie des objets cibles dans des conditions extrêmes.
-
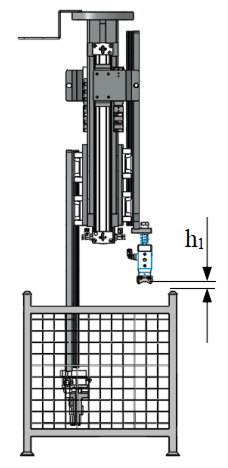
Lors de la saisie d’objets cibles de la couche inférieure, veiller à ce que l’extrémité du sixième axe du robot, la caméra, le dresspack et les autres accessoires du préhenseur maintiennent une distance de sécurité par rapport à la surface supérieure du bac, comme illustré ci-dessous à la hauteur h1.
-
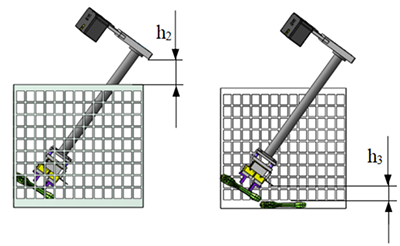
Lorsque le préhenseur saisit des objets cibles avec un certain angle d’inclinaison, veiller à ce que l’extrémité du sixième axe du robot, la caméra, le dresspack et les autres accessoires du préhenseur maintiennent une distance de sécurité par rapport aux bords du bac et aux autres objets cibles, comme illustré ci-dessous aux hauteurs h2 et h3.
-
En règle générale, il n’est pas recommandé que les cinquième et sixième axes du robot pénètrent dans un bac profond pour la préhension. Toutefois, si les objets cibles sont relativement grands et si le bac présente une conception particulière (longueur et largeur plus grandes mais hauteur plus faible), l’opération ci-dessus peut être autorisée à discrétion.
-
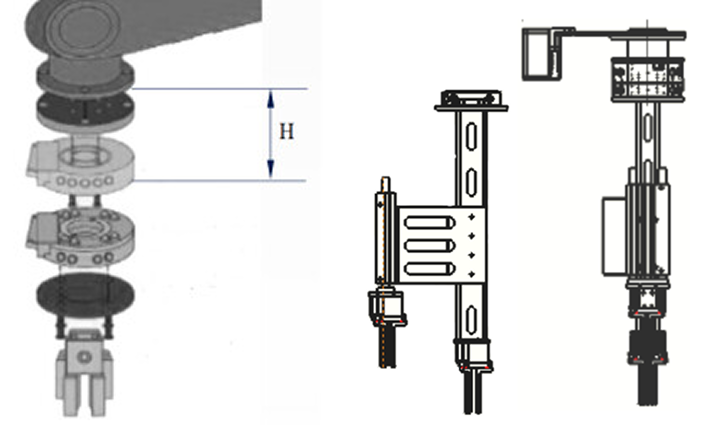
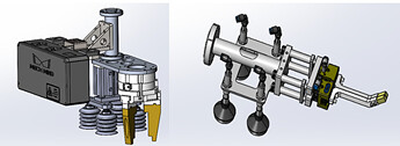
Lorsqu’il faut traiter plusieurs types d’objets cibles sur le même poste, plusieurs préhenseurs doivent être conçus pour satisfaire aux exigences ci-dessus. En général, on peut commuter les préhenseurs à l’aide d’un dispositif de changement rapide. Noter que la précision du dispositif de changement rapide ne doit pas affecter la précision de préhension. De plus, ne pas monter la caméra sur le préhenseur.
La position de montage du dispositif de changement rapide est indiquée dans la zone H de la figure ci-dessous.
-
Lors du montage de plusieurs préhenseurs et caméras, essayer d’éviter de les disposer dans la même direction.
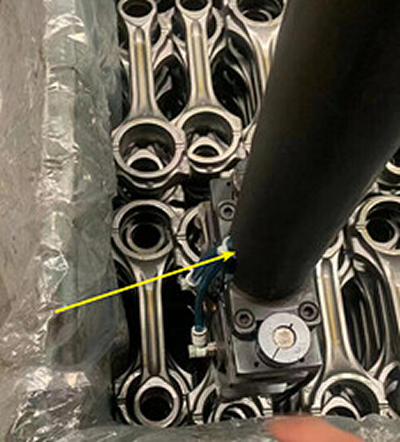
Comme illustré ci-dessous, lorsque l’objet cible est incliné, si le préhenseur est trop long dans une certaine direction, il peut entrer en collision avec le bac pendant la préhension.
En production réelle, la conception du préhenseur peut se référer à l’illustration ci-dessous.
-
Compatibilité insuffisante du préhenseur
-
Symptôme
Lorsque le préhenseur présente une compatibilité insuffisante, une préhension précise dépend fortement de poses d’objets cibles très exactes. Cependant, en raison de la forte variabilité du vrac entrant dans des bacs profonds, combinée aux caractéristiques des objets cibles (par ex. réflectivité) et à la précision globale de la ligne de production, il est souvent difficile d’obtenir de manière constante des poses d’objets cibles précises. Cela peut entraîner des échecs de préhension, des chutes d’objets après la saisie, voire un mauvais positionnement des objets cibles.

-
Solution
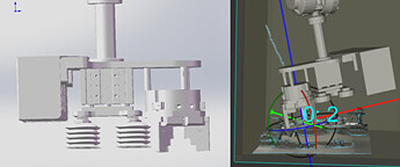
Pour les scénarios exigeant une grande précision de préhension, envisager d’ajouter un dispositif flottant au préhenseur afin de mieux absorber les écarts de pose des objets cibles et d’améliorer la fiabilité de la préhension, comme illustré ci-dessous.
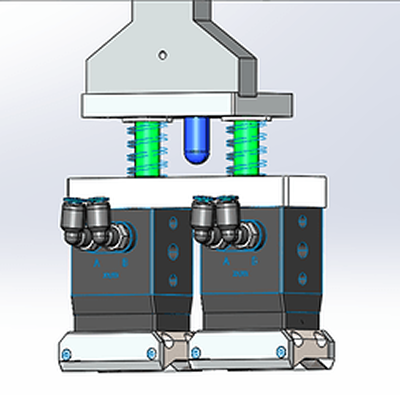
Lors de la conception du dispositif flottant, les points suivants doivent être pris en compte.
-
Veiller à ce que le dispositif flottant puisse basculer librement entre les états « flottant » et « non flottant », et que le préhenseur revienne immédiatement à son état pré-préhension après la saisie d’un objet cible.
-
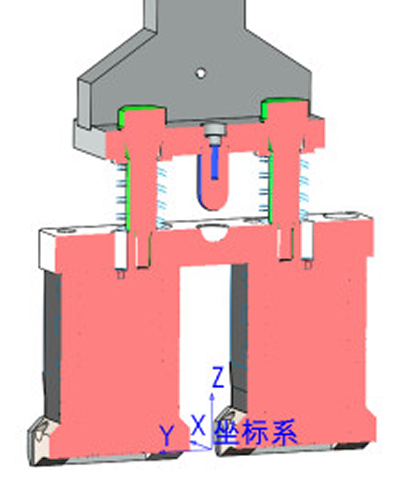
Lorsque le préhenseur est en état flottant, le flottement ne doit être autorisé que dans la/les direction(s) nécessaire(s); toutes les autres directions doivent rester fixes. Par exemple, si le préhenseur flotte en direction Z, les directions X et Y doivent rester fixes.
Un schéma typique de dispositif flottant est présenté ci-dessous.
-
Sélection et disposition inappropriées des accessoires
-
Symptôme
Une sélection et une disposition inappropriées des accessoires peuvent facilement conduire à des frottements voire à des collisions pendant le processus de préhension.

-
Solution
-
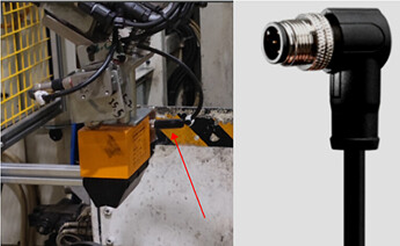
Aux premiers stades de la conception du préhenseur, l’installation de composants tels que les raccords de conduits et les connecteurs électriques à l’extrémité du préhenseur, ainsi que la disposition des câbles et des conduits, doit être considérée de manière globale.
-
Pour des composants tels que des prises rapides ou des connecteurs M12, il est recommandé de router les câbles par le haut. Si un routage latéral est nécessaire, des bornes en « L » doivent être utilisées autant que possible.
-
La disposition des câbles et des conduits doit être aussi compacte que possible, et l’espace interne du préhenseur peut être exploité.
-