Reconnaissance d’objet cible 3D (Qualité de nuage de points médiocre)
Ce tutoriel vous montrera comment reconnaître avec précision les poses d’objets cibles hautement réfléchissants disposés de manière ordonnée. En prenant pour exemple le projet « Reconnaissance d’objet cible 3D (Qualité de nuage de points médiocre) », cette section explique comment ajuster les paramètres pour l’Étape Reconnaissance d’objet cible 3D et met en évidence les points essentiels pour une application pratique.
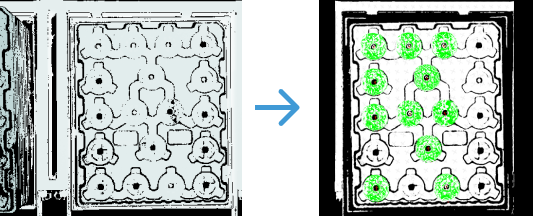
| Scénario d’application | Résultat de reconnaissance |
|---|---|
|
|
Ce qui suit présente les conseils d’application pour le projet d’exemple et les points clés à prendre en compte pour l’application pratique.
Guide d’application
Dans la bibliothèque de solutions de Mech-Vision, vous pouvez trouver la solution « Reconnaissance d’objet cible 3D (Qualité de nuage de points médiocre) » dans la catégorie « Localisation 3D » des « Exemples pratiques » et créer la solution avec un projet « Reconnaissance d’objet cible 3D (Qualité de nuage de points médiocre) ». Après cela, sélectionnez l’Étape Reconnaissance d’objet cible 3D, puis cliquez sur le bouton Assistant de configuration dans le panneau Paramètres de l’Étape pour ouvrir Outil « Reconnaissance d’objet cible 3D » et apprendre comment ajuster les paramètres. Le flux de travail comprend trois processus, à savoir le prétraitement du nuage de points, la sélection et la reconnaissance de l’objet cible, et les paramètres généraux.

-
Prétraitement du nuage de points : Utilisez ce processus pour convertir les données d’image acquises en nuages de points, définir une région de reconnaissance valide, détecter les nuages de points de bord et filtrer les nuages de points qui ne répondent pas aux exigences. Ce processus peut aider à améliorer la précision de reconnaissance du processus suivant.
-
Sélection et reconnaissance de l’objet cible : Après avoir créé le modèle de l’objet cible et les points de prise, décidez s’il faut configurer le paquet de modèle d’apprentissage profond et ajustez les paramètres de reconnaissance de l’objet cible en fonction de la stratégie de reconnaissance visuelle utilisée. Assurez-vous que les paramètres configurés répondent aux exigences de précision opérationnelle afin que la solution de reconnaissance d’objets puisse reconnaître les objets cibles de manière stable et précise.
-
Paramètres généraux : Configurez les ports de sortie dans ce processus en sélectionnant les données pour les points de prise ou les points centraux de l’objet en fonction des exigences des tâches de prélèvement ultérieures.
Ce qui suit présente les principaux paramètres à ajuster dans chaque processus.
Prétraitement du nuage de points
-
Définir la région de reconnaissance.
Définissez une région de reconnaissance (ROI 3D). La région doit couvrir entièrement l’objet cible, avec un peu d’espace supplémentaire autour de l’objet cible dans la région.
-
Dans la plupart des cas, conservez les valeurs par défaut de ces paramètres. Si le bruit est encore présent dans le nuage de points de la scène, essayez d’ajuster les paramètres pertinents pour filtrer le bruit.
Aucun autre paramètre n’a besoin d’être ajusté dans ce projet d’exemple. Vous pouvez cliquer sur le bouton Suivant pour passer au processus « Sélection et reconnaissance de l’objet cible » après avoir défini la région de reconnaissance.
Sélection et reconnaissance de l’objet cible
Après le prétraitement du nuage de points, vous devez créer un modèle de nuage de points de l’objet cible dans l’éditeur d’objet cible, puis définir des paramètres d’appairage pour l’appariement du modèle de nuage de points.
-
Créez un modèle d’objet cible.
Cliquez sur le bouton Ouvrir l’éditeur d’objet cible pour ouvrir l’éditeur, générer un modèle de nuage de points basé sur le nuage de points acquis par la caméra. Après cela, cliquez sur le bouton Enregistrer pour revenir à l’interface de l’outil « Reconnaissance d’objet cible 3D », puis cliquez sur le bouton Mettre à jour l’objet cible pour sélectionner le modèle d’objet cible créé et l’appliquer afin de reconnaître les poses des objets cibles.
-
Assister la reconnaissance par apprentissage profond.
Importez et sélectionnez le paquet de modèle d’apprentissage profond (lien téléchargeable : ici), définissez le ROI, et réglez le Seuil de confiance sur 0.30 dans la fenêtre Configurer l’inférence. Les résultats au-dessus de ce seuil seront conservés.
Lors de la définition du ROI, assurez-vous qu’il y a un peu d’espace supplémentaire autour du bac dans la région. De cette manière, la reconnaissance assistée par apprentissage profond peut obtenir de meilleurs résultats, et l’influence des fluctuations de position de l’objet peut être éliminée. -
Définir les paramètres liés à la reconnaissance d’objet.
Les instructions suivantes concernant l’ajustement des paramètres sont fournies à titre indicatif uniquement. Veuillez ajuster chaque paramètre en fonction de la situation sur site. -
Activez le Mode avancé sur le côté droit de Reconnaître l’objet cible.
-
Définissez le mode d’appairage : Pour ce projet, lorsque l’option Définir automatiquement le mode d’appairage est activée, la précision de reconnaissance peut ne pas répondre aux exigences sur site. Par conséquent, il est recommandé de désactiver cette option et d’ajuster manuellement les paramètres pertinents.
Comme l’appairage grossier permet généralement certaines erreurs d’appairage, réglez le Mode d’appairage grossier sur Appairage par arêtes ; si la précision d’appairage ne répond pas aux attentes, par exemple en cas de déviation angulaire, réglez le Mode d’appairage fin sur Appairage par surfaces pour améliorer la précision de reconnaissance.
Mode d’appairage défini automatiquement
Définir manuellement les paramètres pertinents
-
Ajustez les paramètres d’appairage fin : Pour améliorer la précision de reconnaissance, réglez le Mode de performance sur Haute précision et la Capacité de correction des écarts sur Faible.
-
Définissez le seuil de confiance : Réglez le Seuil de confiance afin que les objets placés tout en haut puissent être reconnus. Dans ce projet, lorsque la Stratégie de confiance est définie sur Automatique, la précision de reconnaissance peut répondre aux exigences sur site. Par conséquent, il suffit de définir ce paramètre sur Automatique et de régler le Seuil de confiance, dont la valeur par défaut est 0.3000.
Dans la section des résultats de reconnaissance en bas de la fenêtre de visualisation de gauche, sélectionnez Résultat de sortie dans le premier menu déroulant. Les objets cibles dont les valeurs de Confiance d’appairage par surfaces et de Confiance d’appairage par arêtes dépassent le seuil défini seront conservés. Veuillez vérifier le résultat de la reconnaissance selon la situation réelle. En cas de fausse reconnaissance ou de faux négatif, augmentez ou diminuez le seuil, respectivement. -
Sorties max sous « Sortie » : Définissez la valeur de ce paramètre sur le nombre d’objets cibles lorsque la pile est complète. Dans ce projet, Sorties max est réglé sur 18.
-
Après ce qui précède, cliquez sur le bouton Suivant pour accéder à la page des paramètres généraux et configurer les ports de sortie.
Paramètres généraux
Après la reconnaissance de l’objet cible, vous pouvez configurer des fonctions auxiliaires autres que la reconnaissance visuelle. Actuellement, seule la configuration des sorties de ports est prise en charge, ce qui peut fournir des résultats de vision et des nuages de points pour les Étapes suivantes.
Comme les Étapes suivantes traiteront les points de prise, sélectionnez Port(s) liés au point de prise sous Sélectionner le port. Puis, sélectionnez l’option Nuage de points original acquis par la caméra, et les données de nuage de points en sortie seront utilisées pour la détection de collisions dans la planification de trajectoire.
| S’il existe d’autres besoins sur site, configurez les ports de sortie pertinents en fonction des besoins réels. |
Vous avez maintenant ajusté les paramètres pertinents. Cliquez sur le bouton Enregistrer pour enregistrer les modifications.
Principales considérations pour l’application
Dans les applications réelles, vous devez comprendre et considérer ce qui suit, puis ajouter l’étape Reconnaissance d’objet cible 3D à votre projet et connecter les ports de données pour reconnaître rapidement et précisément les poses des objets cibles.
-
L’étape « Reconnaissance d’objet cible 3D » est généralement utilisée conjointement avec l’étape Capture d’images depuis la caméra. Cette étape est adaptée aux scénarios de chargement de pièces. Elle est capable de reconnaître des pièces de différentes formes et méthodes d’empilage, y compris des dispositions séparées, un empilage ordonné en une seule couche, un empilage ordonné en plusieurs couches et un empilage aléatoire.
-
L’étape « Reconnaissance d’objet cible 3D » est généralement suivie d’une étape de correction de pose, telle que l’étape Ajuster les poses V2.
Ce projet d’exemple vise à montrer comment identifier avec précision les poses des objets cibles lorsqu’ils sont soigneusement disposés; il omet donc le processus de correction de pose.