Capturer des images depuis la caméra
Fonction
Cette étape sert à obtenir des images couleur, des cartes de profondeur et des nuages de points à partir d’une caméra réelle ou virtuelle.
|
Lorsque cette étape est utilisée pour connecter une caméra des séries DEEP-GL ou LSR, et que le Type d’image 2D est défini sur Image IR interne, la sortie « image couleur » est en réalité une image 2D (source de profondeur). Si vous souhaitez ajuster l’image 2D (source de profondeur), ajustez les paramètres 2D Image (Depth Source) Exposure Mode et 2D Image (Depth Source) Exposure Time dans Mech-Eye Viewer. |
Scénario d’utilisation
Utilisée comme point d’entrée initial d’un projet Mech-Vision, cette étape collecte des données depuis une caméra 3D industrielle Mech-Eye ou une caméra tierce, ou agit comme une caméra virtuelle pour fournir une source de données simulée.
Entrée et sortie
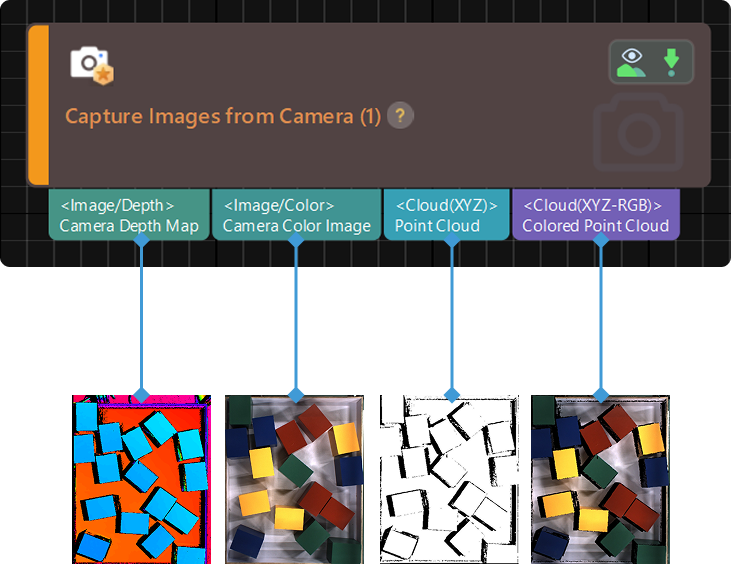
|
Par défaut, le nuage de points texturé produit par l’étape « Capturer des images depuis la caméra » est utilisé comme nuage de points de scène dans le projet. Si le nuage de points de scène par défaut est utilisé dans le projet, des images seront tout de même capturées même si l’étape « Capturer des images depuis la caméra » n’est connectée à aucune étape suivante. |
Description des paramètres
- Mode virtuel
-
Description : Lorsque ce paramètre est activé, cette étape peut être connectée à une caméra virtuelle ; lorsqu’il est désactivé, elle peut être connectée à une caméra réelle.
Valeur par défaut : Désactivé
Les paramètres relatifs aux caméras virtuelles et réelles sont présentés ci-dessous.
Utiliser une caméra réelle
- ID de la caméra
-
Description : Ce paramètre sert à connecter la caméra et à sélectionner le groupe de paramètres d’étalonnage.
Instructions : Veuillez suivre les étapes ci-dessous.
-
Cliquez sur le Sélectionner la caméra pour ouvrir la fenêtre Choisir la caméra et le groupe de paramètres d’étalonnage à utiliser.
-
Sélectionnez la caméra à connecter, puis cliquez sur
 . Si le bouton devient
. Si le bouton devient  , la caméra est connectée avec succès. Enfin, cliquez sur OK.
, la caméra est connectée avec succès. Enfin, cliquez sur OK.
-
- Groupe de paramètres d’étalonnage
-
Description : Ce paramètre sert à spécifier le groupe de paramètres d’étalonnage de la caméra.
Valeur par défaut : Null
Recommandation de réglage : Après la connexion réussie de la caméra, le groupe de paramètres d’étalonnage par défaut est récupéré automatiquement. Lors de l’utilisation de la caméra, assurez-vous que le groupe de paramètres étalonné le plus récent est appliqué afin de garantir des relations de transformation de référentiel précises dans les étapes suivantes.
Si le projet actuel a déjà effectué l’étalonnage de la caméra et qu’un nouveau projet est créé tout en continuant d’utiliser la même caméra, copiez manuellement le groupe de paramètres d’étalonnage du projet actuel dans le dossier d’étalonnage du nouveau projet. Cela permet au nouveau projet de réutiliser les mêmes données d’étalonnage pour cette caméra, évitant ainsi un nouvel étalonnage.
- Groupe de paramètres de configuration
-
Description : Ce paramètre sert à sélectionner le groupe de paramètres de configuration de la caméra. La caméra capturera les données selon les paramètres de ce groupe.
Valeur par défaut : Null
Instructions : Après la connexion réussie de la caméra, le groupe de paramètres par défaut est récupéré automatiquement. Vous pouvez sélectionner dans la liste déroulante le modèle de groupe de paramètres correspondant à ce modèle de caméra.
Vous pouvez gérer des groupes de paramètres dans Mech-Eye Viewer.
- Adresse IP
-
Description : Après la connexion réussie de la caméra, l’adresse IP sera obtenue automatiquement. Ne modifiez pas l’adresse IP, car cela peut entraîner la déconnexion de la caméra.
Valeur par défaut : Null
- Délai d’expiration
-
Description : Ce paramètre sert à définir le délai d’expiration maximal de la réponse (en secondes) entre le moment où la caméra reçoit la demande de données et celui où elle envoie les données au client. Il existe deux types de délais d’expiration :
-
La caméra ne parvient pas à se connecter avec succès dans le délai défini.
-
La caméra ne parvient pas à capturer d’images dans le délai défini.
Valeur par défaut : 10000 ms
-
- Nombre de tentatives de reconnexion
-
Description : Ce paramètre permet de spécifier le nombre maximal de tentatives de reconnexion de la caméra si elle ne parvient pas à se connecter dans le délai imparti.
Valeur par défaut : 3
- Modèle de caméra
-
Description : Ce paramètre sert uniquement à afficher le modèle de la caméra actuellement connectée.
- Type d’image 2D
-
Description : Ce paramètre sert à définir le type d’image 2D produit par la caméra.
Liste des valeurs :
-
Image d’homographie : images 2D (source de profondeur) dont le référentiel est identique à celui de la carte de profondeur et qui n’ont pas besoin d’être rectifiées.
-
Image couleur externe : images 2D (texture) qui doivent être rectifiées avant utilisation. Vous devez sélectionner Rectifier vers la carte de profondeur lorsque des images 2D de ce type sont produites.
Valeur par défaut : Image couleur externe
Ce paramètre est uniquement disponible pour les caméras des séries LSR et DEEP-GL.
-
- Rectifier vers la carte de profondeur
-
Description : Ce paramètre sert à rectifier le référentiel de l’image couleur externe capturée vers le référentiel de la carte de profondeur. Ce paramètre ne peut être ajusté que lorsque Type d’image 2D est défini sur Image couleur externe pour les caméras des séries LSR et DEEP-GL.
Paramètre par défaut : Non sélectionné
Instructions de réglage :
-
Veuillez sélectionner ce paramètre lorsque la qualité du nuage de points est bonne et que l’image couleur de la couche la plus haute doit être acquise dans le projet.
-
Si vous utilisez l’étape Obtenir les nuages de la couche la plus haute suivie de l’étape Projeter le nuage de points 3D sur l’image 2D pour obtenir l’image 2D correspondante, ne sélectionnez pas ce paramètre.
-
Pour reconnaître des objets cibles très réfléchissants avec des zones manquantes dans la carte de profondeur, il convient d’utiliser l’apprentissage profond et ce paramètre n’a pas besoin d’être sélectionné. Si ce paramètre est sélectionné par erreur dans ce cas, une partie des caractéristiques de l’image 2D sera perdue, ce qui affectera les performances de reconnaissance de l’apprentissage profond.
Exemple : Les images 2D avant et après la rectification sont illustrées dans la figure ci-dessous. Comme on peut le voir sur la figure, certaines caractéristiques de l’image couleur rectifiée sont manquantes, en raison de la présence de zones manquantes dans la carte de profondeur.

-
- Nombre maximal de tentatives de capture
-
Description : Ce paramètre sert à spécifier le nombre total de tentatives de capture de l’image si la caméra ne parvient pas à capturer d’image dans le délai imparti.
Valeur par défaut : 3
Valeur recommandée : 3
- Nom du service robot dans Mech-Center
-
Description : Ce paramètre sert à spécifier le nom du service robot, qui doit être identique au nom du robot connecté.
Valeur par défaut : Null.
Utiliser une caméra virtuelle
Lors de l’exécution réelle du projet, il peut être difficile pour reproduire le problème directement. Dans ce cas, l’activation du mode virtuel permet de charger les données enregistrées pour reproduire le problème, ce qui facilite le dépannage.
Lorsque le Mode virtuel est activé, vous devez ajuster les paramètres suivants.
- Groupe de paramètres d’étalonnage
-
Instructions : Une fois le chemin des données sélectionné, le groupe de paramètres d’étalonnage sera rempli automatiquement. S’il existe plusieurs groupes de paramètres d’étalonnage sous le chemin des données, vous pouvez sélectionner dans la liste déroulante le groupe de paramètres d’étalonnage de caméra souhaité.
- Chemin des données
-
Description : Ce paramètre sert à sélectionner le dossier où sont stockés les images, les paramètres intrinsèques et les paramètres extrinsèques.
Instructions : Cliquez sur l’
 à droite et sélectionnez le dossier où sont stockés les images, les paramètres intrinsèques et les paramètres extrinsèques.
à droite et sélectionnez le dossier où sont stockés les images, les paramètres intrinsèques et les paramètres extrinsèques.Recommandation de réglage : Les recommandations pertinentes concernant les données d’image sont les suivantes.
-
En général, il est recommandé de définir le chemin des données comme chemin relatif afin d’éviter les problèmes causés par des modifications du chemin du fichier projet.
-
En mode virtuel, respectez les conventions de nommage des images suivantes. Le numéro de série de l’image couleur doit être identique à celui de sa carte de profondeur correspondante.
-
Images couleur : rgb_image_xxxx.jpg
-
Cartes de profondeur : depth_image_xxxx.png
-
-
Si la méthode de montage de la caméra est Eye-in-Hand, notez que le numéro de série des images doit correspondre à celui des poses de bride.
Les fichiers MRAW ne peuvent pas être lus en mode virtuel.
Précautions : Lors de la sélection d’un chemin des données, faites également attention aux points suivants.
Si l’une des descriptions suivantes est vraie lorsque vous sélectionnez le chemin des données, un Assistant de caméra virtuelle sera déclenché pour vous aider à sélectionner les données d’image.
-
Vous n’avez pas saisi de chemin dans la zone Chemin des données.
-
Il y a plusieurs jeux de données dans le dossier sélectionné.
-
Il n’y a pas d’image couleur, de carte de profondeur, ni de paramètres intrinsèques et extrinsèques dans le dossier sélectionné.
Veuillez suivre les étapes ci-dessous pour configurer dans l’Assistant de caméra virtuelle :
-
Dans la fenêtre Assistant de caméra virtuelle, cliquez sur
 pour sélectionner le chemin des données.
pour sélectionner le chemin des données. -
Cliquez sur Vérifier, et un message Groupe de paramètres de caméra mis à jour apparaîtra.
-
Cliquez sur
pour sélectionner successivement les dossiers où sont stockés les images couleur, les cartes de profondeur et la pose de bride. Puis, cliquez sur Confirmer après avoir sélectionné les données. Notez que la pose de bride ne doit être ajoutée que lorsque la caméra est montée en mode Eye-in-Hand. -
Cliquez sur OK dans la fenêtre contextuelle Configuration terminée.
En mode virtuel, veuillez re-sélectionner le chemin des données s’il y a la moindre modification des images dans le chemin des données sélectionné, sinon les nouvelles données d’image ne pourront pas être lues.
-
- Mode de lecture
-
Description : Ce paramètre sert à spécifier l’ordre de lecture des images.
Liste des valeurs : Séquentiel, Répéter un, Répéter tout, Aléatoire
-
Séquentiel (valeur par défaut) : Lit les images dans l’ordre des images du dossier.
-
Répéter un : Lit l’image actuelle de manière répétée.
-
Répéter tout : Lit toutes les images dans l’ordre du dossier, puis recommence depuis le début une fois toutes les images lues.
-
Aléatoire : Lit les images de manière aléatoire.
-
- Nom de la trame actuelle
-
Description : Ce paramètre sert à afficher le numéro de série et l’horodatage de l’image actuellement lue.
Valeur par défaut : Null
- Type de nom d’image
-
Description : Ce paramètre permet de sélectionner le type de nom d’image produit par le port Chemin de l’image couleur.
Liste des valeurs : Chemin complet, Nom de fichier, Nom de base
Valeur par défaut : Chemin complet.
FAQ
|
Pour d’autres problèmes liés à la connexion de la caméra et à la capture d’images, veuillez vous référer à Dépannage. |