Configurer la communication Snap 7 du PLC Siemens
Cette section explique comment configurer la communication Snap 7 du contrôleur logique programmable Siemens (PLC). Avant la configuration, veuillez confirmer que vous avez déjà sélectionné le robot et accédé à l’interface de configuration de la communication.
-
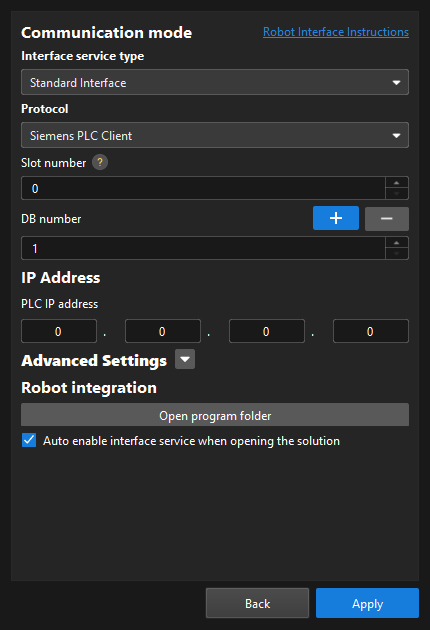
Dans la section Mode de communication, effectuez les configurations suivantes.
-
Définissez le paramètre « Type du service d’interface » sur Interface standard, et définissez le paramètre « Protocole » sur Client PLC Siemens.
-
Indiquez le paramètre « Numéro d’emplacement ». Reportez-vous au tableau suivant pour les instructions.
Série Siemens S7 Numéro d’emplacement S7-300
2
S7-1200
0 ou 1
S7-1500
0 ou 1
Autres modèles
0
-
Indiquez le paramètre « Numéro de DB ».
-
-
Dans la section Adresse IP, saisissez l’adresse IP du PLC. L’adresse IP du PLC et l’adresse IP de l’IPC doivent être sur le même sous-réseau.
-
(Optionnel) Dans la section Paramètres avancés, configurez les paramètres selon vos besoins.
-
Nombre maximal de poses à envoyer à chaque fois: Lorsque vous utilisez la commande d’exécution du projet Mech-Vision, vous pouvez définir le nombre maximal de poses que le système de vision peut envoyer à chaque fois. Le nombre maximal est 30.
-
Délai d’attente pour l’obtention des données Mech-Viz (s): Si vous utilisez la commande d’exécution du projet Mech-Viz et que Mech-Viz ne renvoie pas le résultat pendant la période de délai spécifiée, un code d’erreur de dépassement de délai sera renvoyé.
-
Délai d’attente pour l’obtention des données Mech-Vision (s): Si vous utilisez la commande d’exécution du projet Mech-Vision et que Mech-Vision ne renvoie pas le résultat pendant la période de délai spécifiée, un code d’erreur de dépassement de délai sera renvoyé.
-
Retourner «1102:Déclenchement réussi» après la capture: Dans des scénarios œil-en-main, si vous sélectionnez cette option, le système de vision renverra «1102:Déclenchement réussi» après que la caméra a terminé la capture d’image. De cette façon, le robot peut se déplacer immédiatement sans attendre la fin de l’exécution du projet Mech-Vision, ce qui réduit le temps de cycle. Si vous ne sélectionnez pas cette option, le robot doit attendre l’arrêt de l’exécution du projet Mech-Vision avant de se déplacer.
Après avoir sélectionné cette option, Délai d’attente de fin de capture (s) sera affiché. Si la caméra a besoin d’une période relativement longue pour capturer l’image, spécifiez un délai d’attente plus long. -
Configuration des propriétés: Ce bouton n’a aucun effet sur le protocole sélectionné. Veuillez ignorer ce bouton.
-
Réinitialiser: Réinitialise les éléments de configuration précédents (sauf Configuration des propriétés) aux valeurs par défaut.
-
-
(Optionnel) Sélectionnez Activer automatiquement le service d’interface à l’ouverture de la solution. Lorsque la solution est ouverte, vous n’avez pas besoin de démarrer le service d’interface manuellement.
-
Cliquez sur le bouton Appliquer.
Ensuite, vous devez terminer la Configuration de l’interface standard restante en fonction de l’objet de communication.