Transformer les poses pour le portique
Fonction
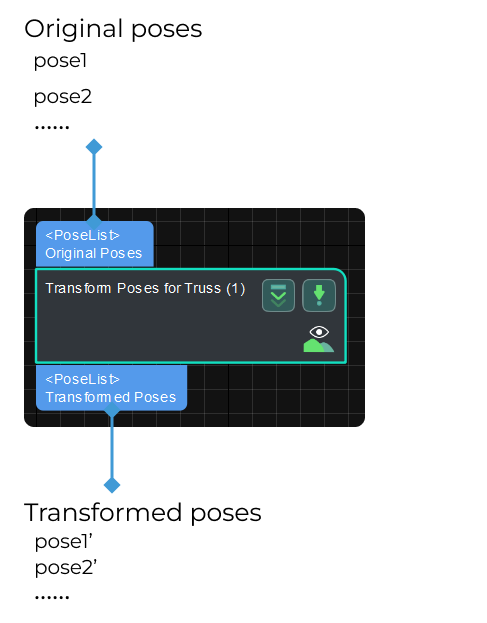
Cette étape est utilisée pour transformer les poses d’entrée vers le repère de la caméra ou le repère du système de portique, puis pour produire les poses transformées.
Scénario d’utilisation
Cette étape est conçue pour transformer le repère des poses dans des projets de systèmes de portique automatisés.
|
Si vous utilisez un robot autre que le système de portique automatisé, veuillez utiliser l’étape Transformer les poses. Si vous utilisez la mauvaise étape de transformation, les poses transformées seront incorrectes et des points de prise erronés seront donc produits. |
Description des paramètres
- Type de transformation
-
Description du paramètre : Ce paramètre est utilisé pour sélectionner le type de transformation de pose.
Options : CameraToRobot, RobotToCamera.
-
CameraToRobot: En supposant que la pose de l’objet dans le repère de la caméra soit Pose 1, lorsque le type de transformation est CameraToRobot, la pose transformée Pose2 dans le repère du système de portique sera produite. Veuillez vous référer à la exemple de réglage pour le résultat correspondant.
-
RobotToCamera: En supposant que la pose de l’objet dans le repère du système de portique soit Pose 1, lorsque le type de transformation est RobotToCamera, la pose transformée Pose2 dans le repère de la caméra sera produite. Veuillez vous référer à la exemple de réglage pour le résultat correspondant.
Paramètre par défaut : CameraToRobot.
-