Réglage des paramètres dans le scénario Supermarché
Dans le scénario supermarché, il convient d’utiliser le dossier de configuration de prélèvement supermarket, après quoi tous les paramètres seront affichés.
Il est recommandé d’utiliser une carte graphique GeForce GTX série 10 avec au moins 4 Go de mémoire ou au-dessus lorsque vous utilisez le modèle pour ce scénario. Lors de la première exécution de cette Étape, le modèle d’apprentissage profond sera optimisé selon le type de matériel et le processus d’optimisation unique prend environ 10 à 30 minutes en fonction de la configuration de l’ordinateur. Veuillez patienter un moment. Une fois le modèle optimisé, le temps d’exécution de l’Étape sera grandement réduit.
Ordre de réglage des paramètres
-
Sélectionnez d’abord Chemin du dossier de configuration de prélèvement.
-
Définissez une Distance de travail pour limiter la plage pour que la caméra capture les données.
-
Ajustez le groupe de paramètres Traitement de pose pour contrôler le décalage vers le haut le long de l’axe Z afin d’éviter d’endommager l’objet.
-
Effectuez la Configuration des ventouses, choisissez d’activer ou non les ventouses en fonction du gabarit et de l’envergure du masque, et activez des sections de ventouses.
-
Configurez la Logique de tri des poses et définissez des poids pour la hauteur de pose et la taille de la ventouse.
Description des paramètres
Distance de travail
- Distance de travail minimale
-
Valeur par défaut : 0
Instruction : La distance la plus courte entre la caméra et l’objet (ou les objets) dans la scène. Si un bac est utilisé, veuillez définir cette valeur comme la distance entre le bas de la caméra et le bord supérieur du bac. Veuillez configurer la valeur selon la situation réelle.
- Distance de travail maximale
-
Valeur par défaut : 3000 mm
Instruction : La distance la plus longue entre la caméra et l’objet (ou les objets) dans la scène. Si un bac est utilisé, veuillez définir cette valeur comme la distance entre le bas de la caméra et le bord inférieur du bac. Veuillez configurer la valeur selon la situation réelle.
Détection de contour (formes spéciales)
- Détection de contour
-
Réglage par défaut : Non sélectionné。
Instruction : Sélectionnez pour détecter le contour de l’objet. Une fois cette option sélectionnée, le paramètre Filtre de forme spéciale apparaîtra.
Filtre de forme spéciale (souvent utilisé pour les scénarios de prélèvement de colis)
- Filtrer les objets étroits
-
Réglage par défaut : Non sélectionné。
Instruction : Une fois cette option sélectionnée, tout objet dont le bord le plus court de la plus petite boîte englobante cuboïde est inférieur au seuil défini sera considéré comme un objet étroit et sera donc ignoré.
- Limite inférieure de la longueur du bord court
-
Valeur par défaut : 0
Instruction : Cette option apparaîtra une fois Filtrer les objets étroits sélectionné. Tout objet dont le bord le plus court de la plus petite boîte englobante cuboïde est inférieur à cette valeur sera considéré comme un objet étroit et sera donc ignoré. Veuillez configurer la valeur selon la situation réelle.
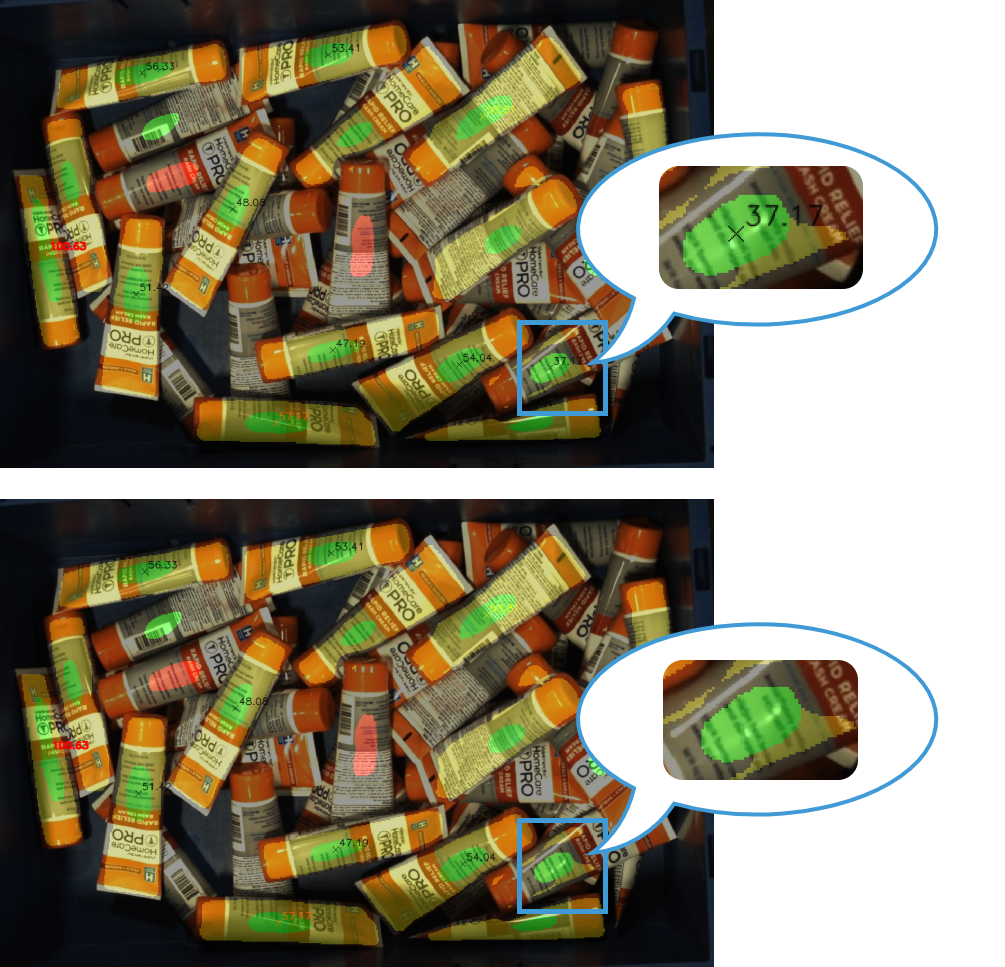
Exemple : Lorsque la valeur est réglée sur 30, les objets dont les longueurs réelles sont inférieures à 30 mm seront filtrés, comme illustré ci-dessous. Les figures du haut et du bas montrent respectivement le résultat de reconnaissance avant et après filtrage.
- Filtrer les objets longs
-
Réglage par défaut : Non sélectionné。
Instruction : Une fois cette option sélectionnée, tout objet dont le bord le plus long de la plus petite boîte englobante cuboïde est supérieur au seuil défini sera considéré comme un objet long et sera donc ignoré.
- Limite supérieure de la longueur du bord long
-
Valeur par défaut : 0
Instruction : Cette option apparaîtra une fois Filtrer les objets longs sélectionné. Tout objet dont le bord le plus long de la plus petite boîte englobante cuboïde est supérieur à cette valeur sera considéré comme un objet long et sera donc ignoré. Veuillez configurer la valeur selon la situation réelle.
Exemple : Lorsque la valeur est réglée sur 180, les objets dont les longueurs réelles sont supérieures à 180 mm seront filtrés, comme illustré ci-dessous. Les figures du haut et du bas montrent respectivement le résultat de reconnaissance avant et après filtrage.

Détection de chevauchement
- Détection de chevauchement
-
Réglage par défaut : Non sélectionné。
Instruction : Veuillez sélectionner cette option lorsqu’il y a des objets qui se chevauchent. Une fois cette option sélectionnée, les objets en chevauchement seront détectés et leur priorité de prélèvement sera réduite.
- Nombre maximal d’objets
-
Valeur par défaut : 6
Instruction : Cette option apparaîtra une fois Détection de chevauchement sélectionnée. Elle définit le nombre maximal d’objets considérés comme des objets en chevauchement. Veuillez configurer la valeur selon la situation réelle. Plus cette valeur est élevée, plus d’objets seront considérés en chevauchement, et il sera donc plus difficile d’achever la tâche de prélèvement. Cependant, il est moins probable que les objets cibles soient endommagés.
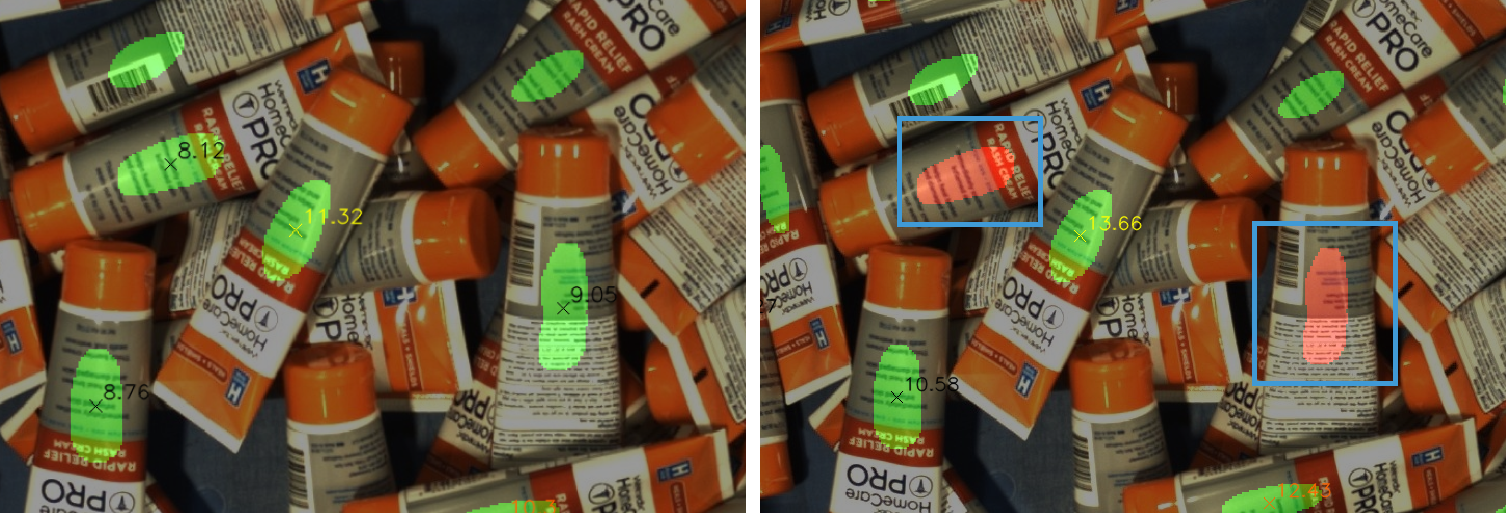
Exemple : Lorsque la valeur est réglée sur 6, pas plus de 6 objets en chevauchement seront détectés, comme illustré ci-dessous. Les figures de gauche et de droite montrent les résultats de reconnaissance avant et après le réglage de la valeur. Les objets en rouge sont des objets en chevauchement.
Configuration des ventouses
Ce paramètre détermine le résultat de sortie du port de sortie « Étiquette de ventouse » de l’Étape « Prédire les points de prise ».
- Allouer par gabarit du masque
-
Réglage par défaut : Désactivé。
Options : Désactivé, En deux groupes et En trois groupes。
Instruction : Les objets seront répartis dans différents groupes selon les rayons du plus petit cercle inscrit de leurs masques, et la configuration des ventouses sera différente selon les groupes。
- Seuil de gabarit 1
-
Valeur par défaut : 0
Instruction : Premier seuil des rayons du plus petit cercle inscrit. Les objets dont le rayon est inférieur à ce seuil seront affectés au groupe 1, tandis que les objets dont le rayon est supérieur à ce seuil seront affectés au groupe 2。
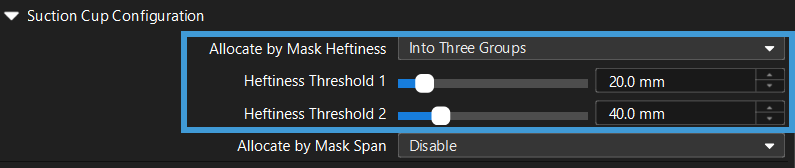
Exemple : Comme illustré ci-dessous, lorsque le rayon du cercle inscrit détecté du masque de l’objet est inférieur à 20 mm, l’étiquette de la ventouse sera marquée comme « Petit ».

- Seuil de gabarit 2
-
Valeur par défaut : 0
Instruction : Deuxième seuil des rayons du plus petit cercle inscrit. Les objets dont le rayon est inférieur à ce seuil seront affectés au groupe 2, tandis que les objets dont le rayon est supérieur à ce seuil seront affectés au groupe 3。
Exemple : Comme illustré ci-dessous, lorsque le rayon détecté du cercle inscrit du masque de l’objet est supérieur à 40 mm, l’étiquette de la ventouse sera « Grand », et si le rayon est compris entre 20 mm et 40 mm, l’étiquette sera « Moyen ».
- Allouer par envergure du masque
-
Réglage par défaut : Désactivé。
Options : Désactivé et En deux groupes。
Instruction : Les objets seront répartis dans différents groupes selon la diagonale de la plus petite boîte englobante de leurs masques, et la configuration des ventouses sera différente selon les groupes。
- Seuil d’envergure du masque
-
Valeur par défaut : 80
Instruction : Les objets dont la diagonale est inférieure à ce seuil seront marqués « Court », sinon ils seront marqués « Long ».
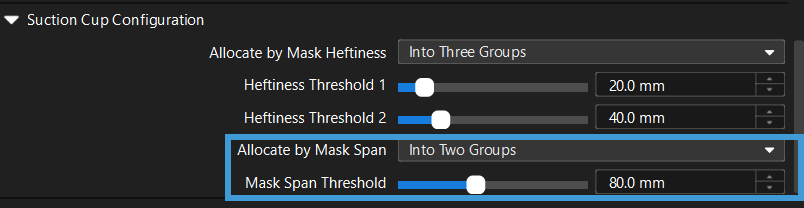
Exemple : Comme illustré ci-dessous, l’objet détecté sera étiqueté « Long » lorsque sa longueur est supérieure à 80 mm, sinon il sera étiqueté « Court ».
Logique de tri des poses
- Poids de la hauteur de pose
-
Réglage par défaut : 3
Options : 1, 2, 3
- Poids de la taille de la ventouse
-
Réglage par défaut : 1
Options : 0, 1, 2, 3
- Poids de la longueur de l’objet
-
Réglage par défaut : 1
Options : 0, 1, 2, 3
Instruction : Lorsque le Poids de la hauteur de pose, le Poids de la taille de la ventouse et le Poids de la longueur de l’objet sont spécifiés, le score final est calculé selon l’équation : Score final = Hauteur de pose × Poids de la hauteur de pose + Taille de la ventouse × Poids de la taille de la ventouse + Longueur de l’objet × Poids de la longueur de l’objet, et les objets ayant un score final plus élevé seront prioritaires pour le prélèvement.
Visualisation
- Activer
-
Réglage par défaut : Sélectionné。
Instruction : Sélectionnez pour activer la visualisation。
- Type de visualisation
-
Réglage par défaut : Score final。
Options : Score final, Afficher le diamètre de la ventouse, Afficher la longueur de l’objet et Afficher la hauteur de pose。
Instruction : Sélectionnez les options de visualisation。
Exemple :
-
Lorsque Score final est sélectionné comme Type de visualisation, le résultat de visualisation est montré ci-dessous. L’objet avec du texte rouge sera prélevé en premier。

-
Lorsque Afficher le diamètre de la ventouse est sélectionné comme Type de visualisation, le résultat de visualisation est montré ci-dessous. L’objet avec du texte rouge sera prélevé en premier。

-
Lorsque Afficher la longueur de l’objet est sélectionné comme Type de visualisation, le résultat de visualisation est montré ci-dessous. L’objet avec du texte rouge sera prélevé en premier。

-
Lorsque Afficher la hauteur de pose est sélectionné comme Type de visualisation, le résultat de visualisation est montré ci-dessous. L’objet avec du texte rouge sera prélevé en premier。

-