Définir les quaternions de pose
|
Le contenu de cette étape est en cours de maintenance. Si vous avez besoin d’informations urgentes sur cette étape, veuillez visiter Mech-Mind Communauté en ligne. |
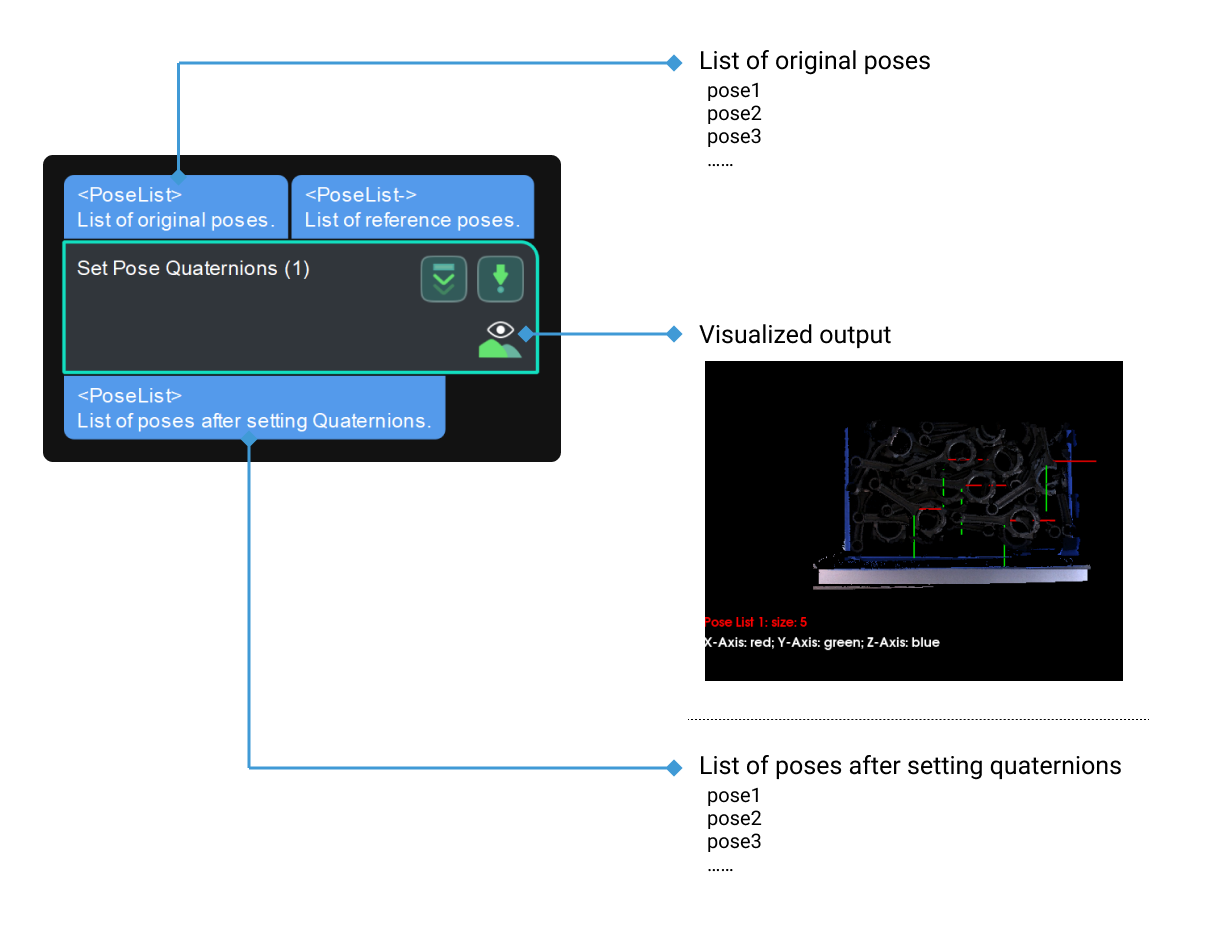
Fonction
Définissez les orientations des poses (en quaternion) à partir de la pose de référence fournie par le deuxième port, ou du quaternion défini dans le paramètre.
Scénario d’utilisation
Une étape générale de réglage du quaternion de pose. Si la liste de poses de référence en entrée contient plusieurs poses, seul le quaternion de la première pose sera utilisé.