Transformation des poses
Fonction
Cette étape peut transformer des poses d’un référentiel à un autre, ou effectuer une transformation dans son propre référentiel en fonction de la pose de référence.
Scénario d’utilisation
Cette étape est généralement utilisée pour transformer des poses entre le référentiel de la caméra et le référentiel du robot.
Si vous utilisez un robot portique, veuillez utiliser l’étape Transformation des poses pour portique.
Description des paramètres
Paramètres de visualisation
- Afficher le nuage de points dans le référentiel sélectionné
-
Description: Afficher le nuage de points dans le référentiel du robot ou le référentiel de la caméra.
Valeur par défaut: Robot Coordinate
Liste des valeurs: Robot Coordinate, Camera Coordinate
Instructions: Lorsque ce paramètre est défini sur Robot Coordinate, le panneau de sortie de débogage affichera la sortie visualisée sous le référentiel de la caméra ; lorsqu’il est défini sur Robot Coordinate, le panneau affichera la sortie visualisée sous le référentiel du robot. Veuillez consulter exemple de réglage pour le résultat correspondant.
Ce paramètre n’apparaît que lorsque le nuage de points de la scène est défini dans le projet.
-
Sous Robot Coordinate, le panneau de sortie de débogage est noir, et vous devez ajuster la vue pour afficher le nuage de points et les coordonnées.
-
Sous Camera Coordinate, le panneau de sortie de débogage n’affiche que le nuage de points, et vous devez ajuster l’orientation du nuage de points pour afficher les coordonnées.
-
- Type de pose à visualiser
-
Description: Ce paramètre est utilisé pour sélectionner le type de pose à visualiser.
Valeur par défaut: After
Liste des valeurs: After, Before, et All
Instructions: Sélectionnez une option appropriée selon les besoins réels. Veuillez consulter exemple de réglage pour le résultat correspondant.
Paramètres de transformation
- Type de transformation
-
Description: Ce paramètre est utilisé pour sélectionner le type de transformation de pose.
Valeur par défaut: CameraToRobot
Liste des valeurs: CameraToRobot, RobotToCamera, AllWithFrst, FirstWithAll, et UseCorrespondenceInput
Instructions:
-
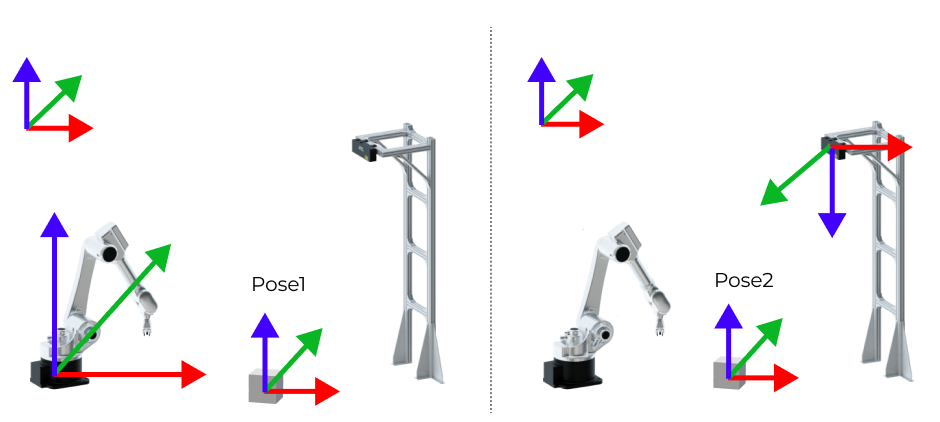
CameraToRobot: En supposant que la pose de l’objet dans le référentiel de la caméra soit Pose 1, lorsque le type de transformation est CameraToRobot, la pose transformée Pose2 dans le référentiel du robot sera renvoyée. Veuillez consulter exemple de réglage pour le résultat correspondant.
-
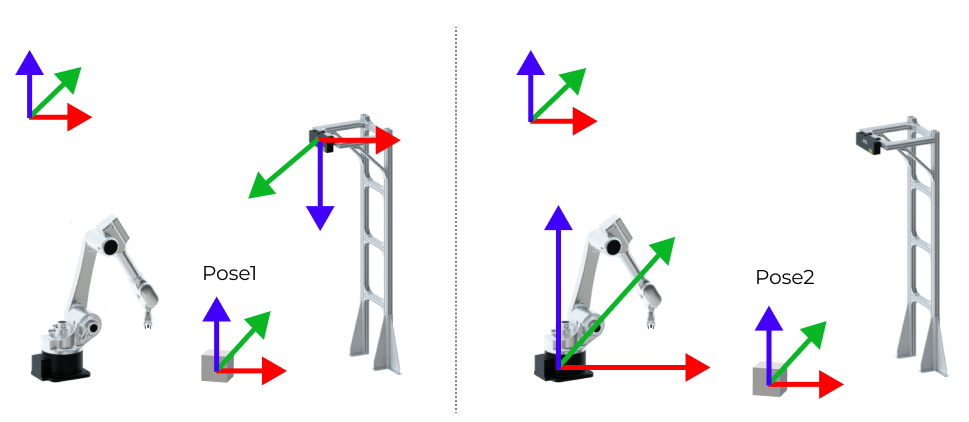
RobotToCamera: En supposant que la pose de l’objet dans le référentiel du robot soit Pose 1, lorsque le type de transformation est RobotToCamera, la pose transformée Pose2 dans le référentiel de la caméra sera renvoyée. Veuillez consulter exemple de réglage pour le résultat correspondant.
-
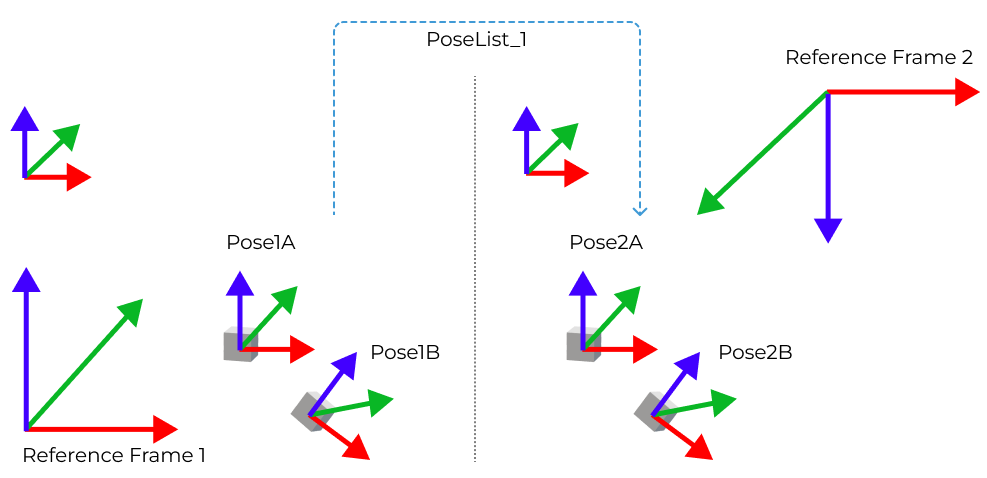
AllWithFirst: Les poses des objets A et B sont notées respectivement Pose1A et Pose1B dans le référentiel 1. Lorsque le type de transformation est sélectionné comme AllWithFirst, et qu’une liste de poses de référence a été saisie, les poses transformées des objets A et B, à savoir respectivement Pose2A et Pose2B dans le référentiel 2, seront renvoyées. La première pose de référence de la liste est utilisée pour transformer toutes les poses d’origine. Veuillez consulter exemple de réglage pour le résultat correspondant.
-
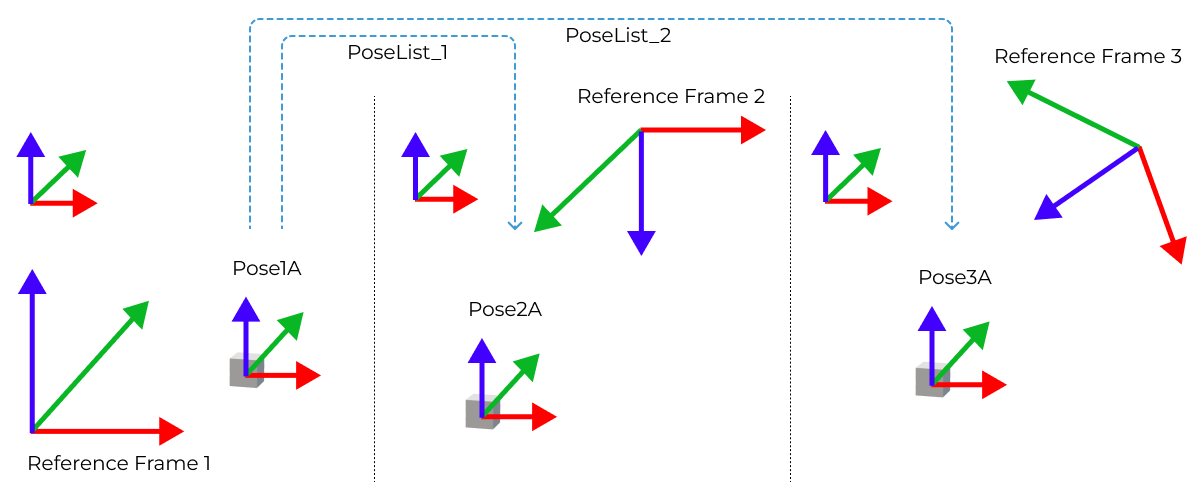
FirstWithAll: Les poses des objets A et B sont notées respectivement Pose1A et Pose1B dans le référentiel 1. Lorsque le type de transformation est sélectionné comme FirstWithAll, et que des listes de poses de référence ont été saisies, les poses transformées de l’objet A, à savoir Pose2A et Pose3A, dans les référentiels 2 et 3 respectivement, seront renvoyées. Toutes les poses de référence des listes sont utilisées pour transformer la première pose d’origine, qui est Pose1A dans cet exemple. Veuillez consulter exemple de réglage pour le résultat correspondant.
-
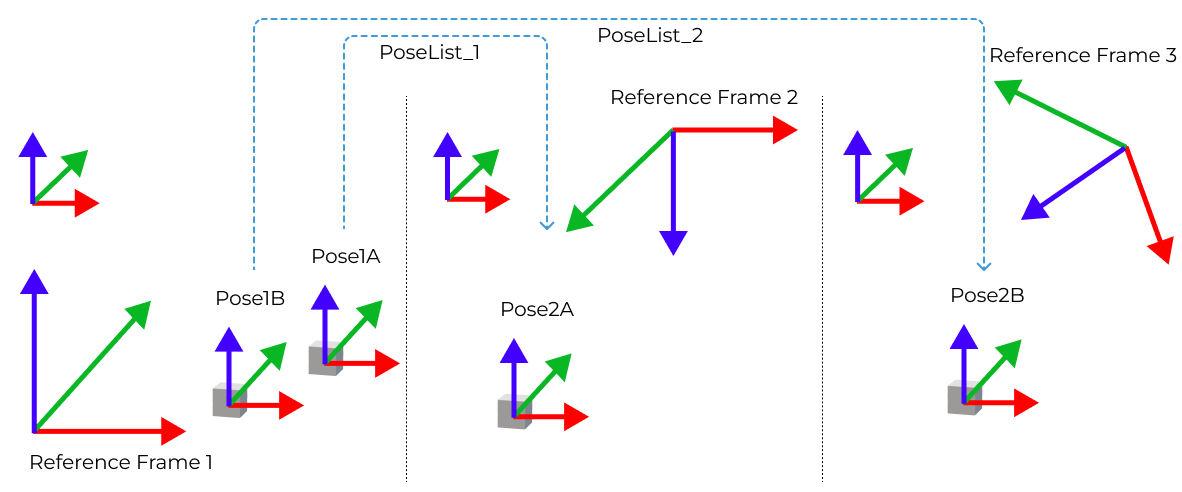
UseCorrespondenceInput: Les poses des objets A et B sont notées respectivement Pose1A et Pose1B dans le référentiel 1. Lorsque le type de transformation est sélectionné comme UseCorrespondenceInput, et que des listes de poses de référence ont été saisies, les poses transformées des objets A et B, à savoir Pose2A et Pose3B, dans les référentiels 2 et 3 respectivement, seront renvoyées. Les poses de référence de la liste sont utilisées pour transformer chaque pose d’origine de manière correspondante. Veuillez consulter exemple de réglage pour le résultat correspondant.
-
Exemples de réglage
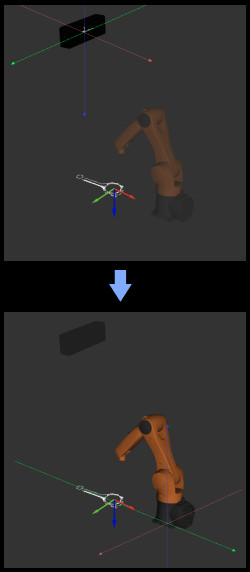
Afficher le nuage de points dans le référentiel sélectionné
Comme montré ci-dessous, la figure de gauche montre le nuage de points dans le référentiel de la caméra, et la figure de droite montre le nuage de points dans le référentiel du robot.
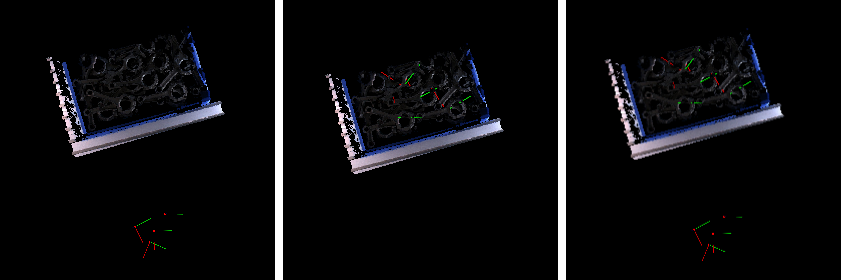
Type de pose à visualiser
Dans le cas du référentiel du robot, les poses visualisées sont les suivantes lorsque le paramètre Type de pose à visualiser est réglé sur After, Before et All.
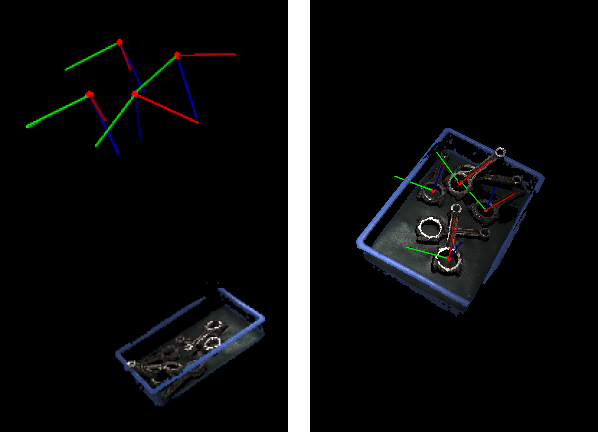
CameraToRobot
La figure suivante montre les résultats avant (à gauche) et après (à droite) la transformation de pose de CameraToRobot.
RobotToCamera
La figure suivante montre les résultats avant (à gauche) et après (à droite) la transformation de pose de RobotToCamera.