Créer et importer un modèle de robot
Lorsque la bibliothèque de modèles de robots ne contient pas le robot dont vous avez besoin, les procédures de base pour créer et importer un modèle de robot sont présentées ci-dessous.
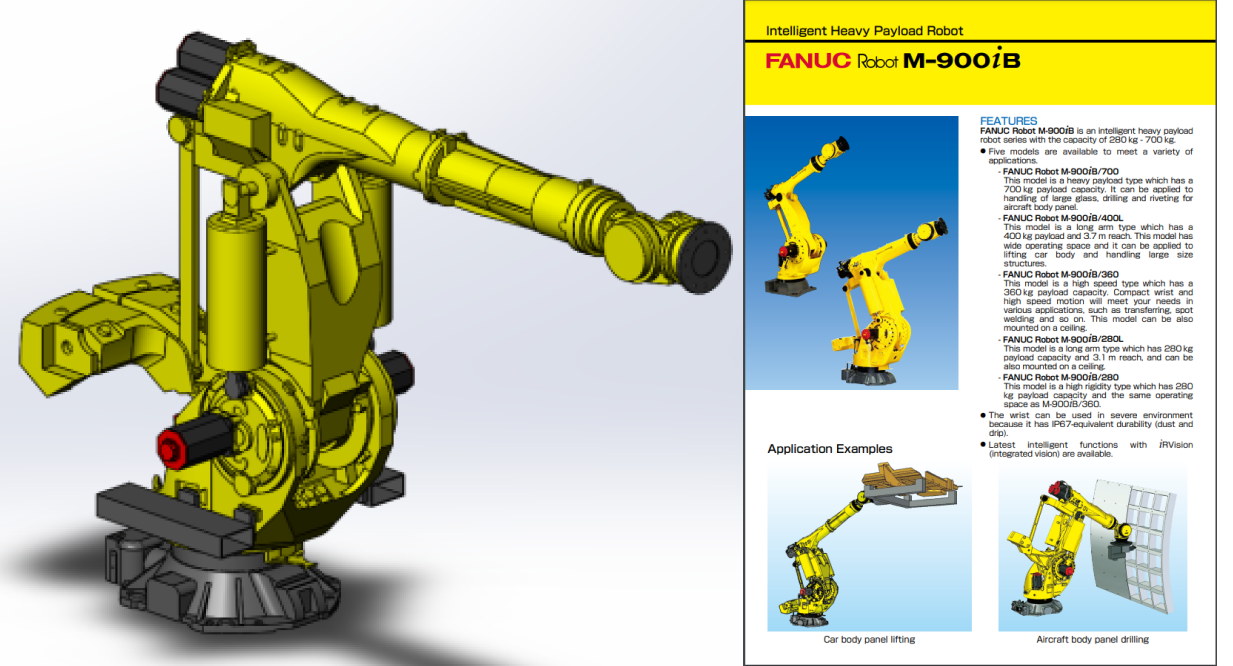
Un robot FANUC M-900iB/400L sera utilisé comme exemple.
|
Si la marque de robot que vous souhaitez importer n’est pas disponible dans la bibliothèque de modèles de robots, veuillez vous référer à Comment importer des modèles de robots d’autres marques ?. |
Obtenir le fichier CAO et les spécifications du robot
Avant de créer le modèle du robot, veuillez obtenir le fichier CAO et la fiche technique contenant les paramètres DH et les plages de mouvement de chaque articulation du robot.
Vous pouvez télécharger la documentation correspondante sur le site officiel du fabricant du robot.
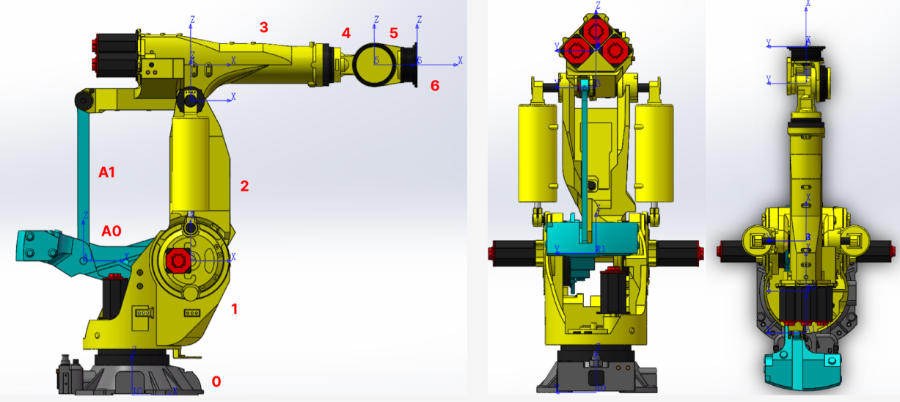
Le schéma ci-dessous montre le modèle CAO et descriptions du FANUC M-900iB/400L.
| Certaines pages web de constructeurs de robots fournissent des modèles au format X_T. Comparés aux fichiers STEP, les fichiers X_T offrent de meilleures performances et nécessitent moins de temps de reconstruction. Il est donc recommandé d’utiliser des modèles au format X_T. |
Déterminer les configurations du robot et rédiger les fichiers de paramètres
Après avoir confirmé la configuration du robot en vous référant à son modèle CAO et à son manuel, créez le fichier de paramètres correspondant.
Obtenir la configuration du robot (algo_type)
Les robots présentent des configurations différentes, décrites par des repères et des paramètres DH différents.
Veuillez vous référer à Configurations de robots pour des exemples de différentes configurations de robots.
Le FANUC M-900iB/400L est un robot industriel courant à 6 axes avec poignet à rotule, qui appartient à la configuration SphericalWrist_SixAxis.
Obtenir les paramètres DH (dh, dhPassive)
Veuillez consulter Configurations de robots et trouver le fichier de configuration correspondant du robot. Vous pouvez alors confirmer la valeur des paramètres DH dans [robot]_algo.json selon les paramètres DH figurant dans les spécifications du robot.
Les paramètres DH du FANUC M-900iB/400L sont a=0.940, b=0.410, c=1.120, d=0.250, e=2.180, f=0.300.
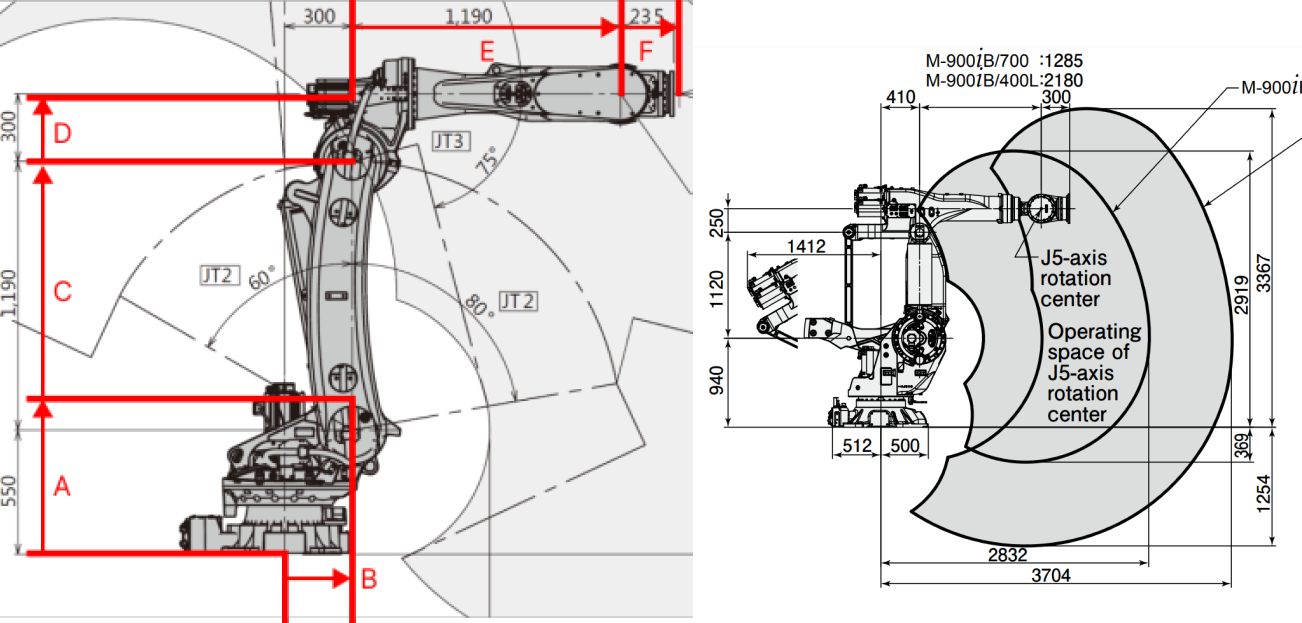
Sur la figure ci-dessus, le schéma de configuration du robot SphericalWrist_SixAxis se trouve à gauche, et les spécifications du FANUC M-900iB/400L à droite.
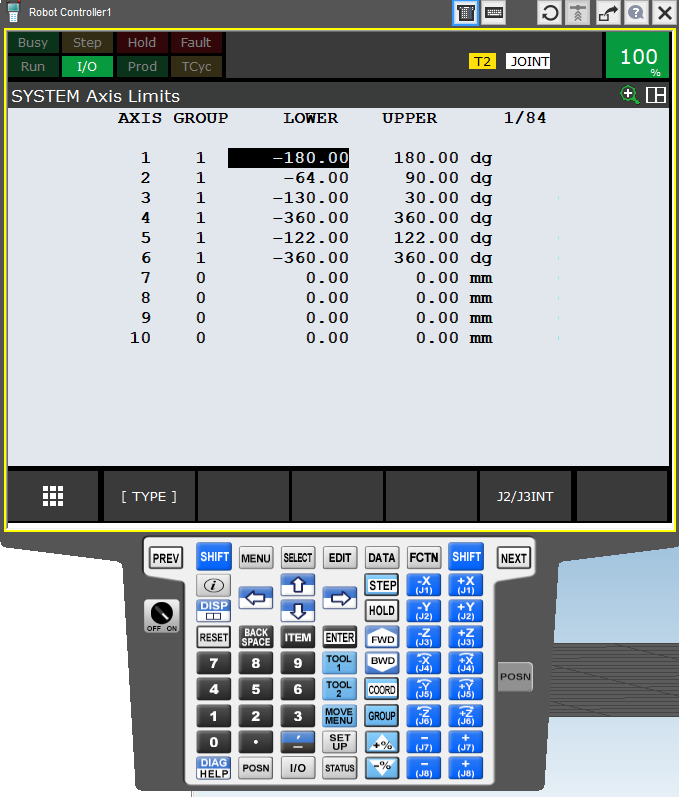
Obtenir les plages de mouvement de chaque articulation (minlimits, maxlimits)
En général, les plages de mouvement des articulations sont indiquées dans la documentation du robot. Cependant, dans ce cas, vous devez ouvrir le logiciel de simulation des robots FANUC, RoboGuide, puis y rechercher ces plages de mouvement.
Obtenir d’autres paramètres
Pour les marques de robots courantes, vous pouvez vous référer aux paramètres d’autres modèles de robots déjà créés. S’il n’y a pas de paramètres disponibles auxquels se référer, veuillez contacter les ingénieurs sur site pour obtenir d’autres paramètres, c.-à-d. mastering_joints, axis_flip, base_z_offset, axis_flip, et mastering_joints.
|
Rédiger le fichier [robot]_algo.json
Le fichier modèle algo_example.json est stocké dans C:/Users/Administrator/AppData/Roaming/Mmind/Robot Library 2.0. Vous pouvez créer un nouveau fichier [robot]_algo.json à partir de ce modèle.
| Pour la définition des paramètres du fichier [robot]_algo.json, veuillez vous référer à Description du fichier [robot]_algo.json. |
Rédiger le fichier de paramètres [robot]_profile.json
Le fichier modèle profile_example.json est stocké dans C:/Users/Administrator/AppData/Roaming/Mmind/Robot Library 2.0. Vous pouvez créer un fichier [robot]_profile.json à partir de ce modèle.
| Pour la définition des paramètres du fichier [robot]_profile.json, veuillez vous référer à Description du fichier [robot]_profile.json. |
Utiliser SolidWorks pour construire un modèle STL de l’ensemble du robot
Importer le modèle CAO dans SolidWorks
Ouvrez le modèle CAO du robot dans SolidWorks, comme montré ci-dessous.
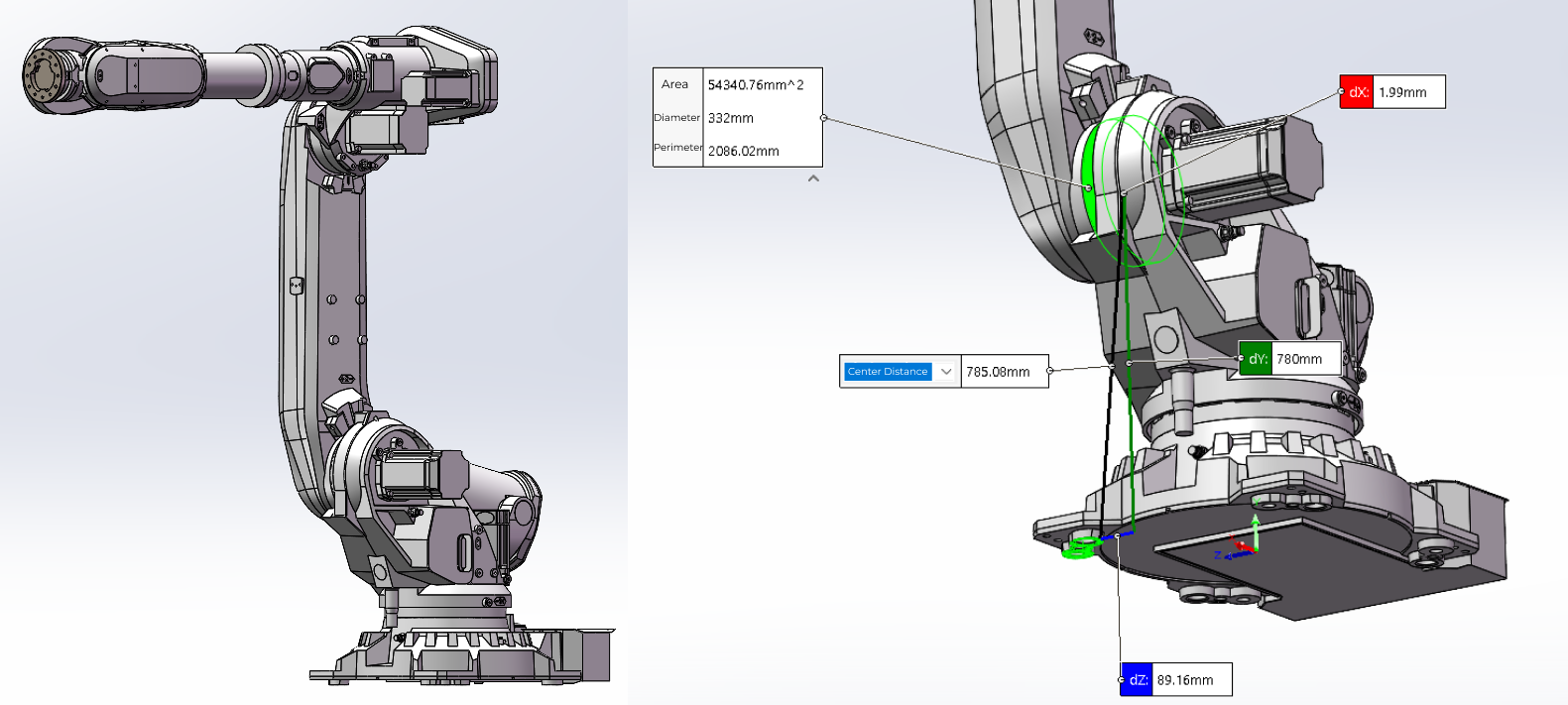
Sur la figure ci-dessus, le modèle CAO du robot se trouve à gauche et un diagramme de référence d’assemblage à droite.
|
Créer des repères de référence
Veuillez vous référer à Configurations de robots pour créer le repère de référence de chaque axe.
Pour le FANUC M-900iB/400L, la configuration est SphericalWrist_SixAxis, et la pose du robot doit être conforme à la figure ci‑dessous : l’axe J1 est aligné avec la base, l’axe J2 reste vertical vers le haut, les axes J3 et J4 restent horizontaux vers l’avant, et l’axe J5 reste orienté vers l’avant plutôt que vers le bas. Une fois la pose déterminée, toutes les pièces doivent être fixées.
Exporter les modèles STL des articulations du robot
Il est recommandé de masquer les autres pièces de l’assemblage lors de l’exportation successivement des modèles des articulations.
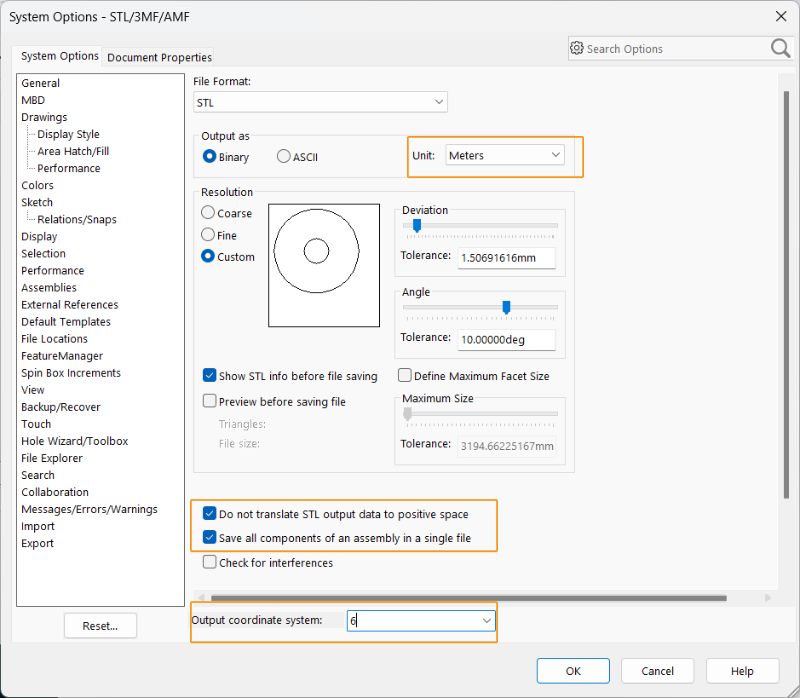
Enregistrez le fichier exporté au format STL, réglez la sortie sur binaire et l’unité sur mètre. Veuillez vous référer à Configurations de robots pour des informations détaillées. Les autres paramètres sont illustrés ci‑dessous.
Le modèle complet du robot FANUC M-900iB/400L au format STL est présenté ci‑dessous.
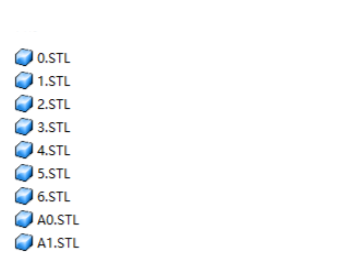
Vous avez maintenant terminé la création du modèle de robot.
Importer le modèle de robot dans Mech-Viz
Après avoir créé le modèle de robot, veuillez l’importer dans la bibliothèque de modèles de robots de Mech-Viz pour une utilisation ultérieure.
Suivez les étapes ci‑dessous pour importer le modèle de robot dans Mech-Viz:
-
Vous pouvez ouvrir le dossier contenant le modèle du robot en utilisant l’une des méthodes suivantes.
-
Dans la bibliothèque de modèles de robots, cliquez avec le bouton droit sur n’importe quelle carte de modèle de robot, puis sélectionnez « Ouvrir le dossier du modèle de robot » dans le menu contextuel.
-
Dans l’arborescence des ressources du projet, cliquez avec le bouton droit sur le nom du robot, puis sélectionnez « Ouvrir le répertoire des fichiers du robot » dans le menu contextuel.
-
-
Accédez au dossier de la marque du robot dans le répertoire des fichiers du modèle de robot.
Le modèle de robot de Mech-Viz est stocké dans le répertoire
C:\Users\<UserName>\AppData\Roaming\Mmind\Robot Library 2.0. Les modèles de robots de la même marque sont stockés dans un même dossier portant le nom de la marque, et tous les fichiers du modèle de robot sont stockés dans le dossier portant le nom du modèle. -
Dans le dossier de la marque, créez un nouveau dossier pour le modèle de robot spécifique—par exemple, fanuc_m900ib_400l.
Utilisez des lettres minuscules pour nommer les dossiers.
-
Placez tous les fichiers de modèle et de paramètres dans le chemin désigné afin d’importer le modèle de robot dans Mech-Viz.
-
Les formats de modèle de robot pris en charge incluent STL, DAE et OBJ ; les fichiers de chaque format doivent être stockés dans leurs dossiers respectifs.
-
Le modèle STL peut être utilisé à la fois pour la visualisation et la détection de collisions.
-
Le modèle DAE ne peut être utilisé que pour la visualisation.
-
Le modèle OBJ ne peut être utilisé que pour la détection de collisions.
-
Un modèle de robot complet doit inclure au moins un modèle de visualisation et un modèle de collision.
Par exemple, pour un robot FANUC M900iB/280L, le dossier de modèle correspondant se trouve à
C:\Users\<UserName>\AppData\Roaming\Mmind\Robot Library 2.0\fanuc\fanuc_m_900ib_280l. La structure du dossier est illustrée dans la figure ci‑dessous.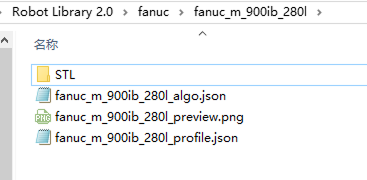
STL
Fichier de modèle
fanuc_m900ib_280l_algo.json
Fichier des paramètres de la cinématique du robot
fanuc_m900ib_280l_preview.png
Image du robot
fanuc_m900ib_280l_profile.json
Fichier de description des paramètres de la cinématique du robot
-
-
Retournez à Bibliothèque de modèles de robots, et vous pourrez trouver et sélectionner le modèle de robot importé.
Vérifier les paramètres du modèle de robot
Avant le déploiement réel du projet, vous devez vérifier les paramètres du modèle de robot. S’il existe une grande différence, par exemple de 1 à 2 mètres, entre la pose et le TCP simulés dans le logiciel et la pose réelle du robot, cela indique que les paramètres du modèle de robot peuvent être inexacts et doivent être corrigés.
Pour des instructions détaillées, voir Guide de vérification des paramètres du modèle de robot.