Notifier
Scénario d’utilisation
Cette étape est généralement utilisée dans des scénarios où un dispositif externe est requis pour la communication.
Description des paramètres
Paramètres de communication
- Récepteur de communication de l’interface
-
Description: Ce paramètre spécifie le mode de communication de l’interface.
Liste des valeurs: Interface standard, Adaptateur
Lors de l’utilisation du mode de communication Adaptateur, si le projet contient plusieurs étapes Notifier, tous les Noms d’adaptateur définis dans ces étapes Notifier doivent être cohérents.
- Message
-
Description: Le message personnalisé. L’adaptateur exécute une logique différente en fonction du contenu du message. Par exemple, vous pouvez définir le message sur finish si l’opération de branche se termine.
- Action en cas d’échec
-
Description: Ce paramètre spécifie l’action du logiciel lorsque le message de notification n’est pas envoyé avec succès.
Liste des valeurs: Avertissement, Réessayer, Arrêt
- Nécessite l’arrêt du robot
-
Description: Si ce paramètre est sélectionné, le robot fera une pause lorsque le projet s’exécutera jusqu’à cette étape. Si ce paramètre n’est pas sélectionné, le robot continuera de se déplacer pendant que l’étape envoie le message.
- Délai d’expiration
-
Description: Si l’envoi du message échoue après le délai d’expiration, le robot exécutera l'Action en cas d’échec.
Exemples d’application
Envoyer un message d’échec de planification à l’adaptateur
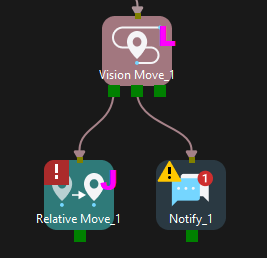
Lorsque l’étape Déplacement visuel échoue à générer une planification de trajectoire valide, l’étape Notifier peut envoyer un message d’échec à l’adaptateur.
Comme illustré dans la figure ci-dessous, connectez l’étape Notifier après l’étape Déplacement visuel. Ensuite, définissez le Récepteur de communication de l’interface sur Adaptateur et le Message sur finish. Dans cette configuration, l’étape Notifier enverra le message à l’adaptateur chaque fois que la planification de trajectoire échoue, et le message d’échec est finish.
Se coordonner avec le robot pour réaliser la stratégie « Capturer et déplacer »
Dans les scénarios EIH utilisant le mode de communication Interface standard, l’étape Notifier doit être ajoutée au flux de travail pour se coordonner avec le robot pour la stratégie « Capturer et déplacer ».
-
Dans Mech-Vision, cliquez sur . Puis, activez l’option Retourner « 1102: Déclenchement réussi » après la capture.
-
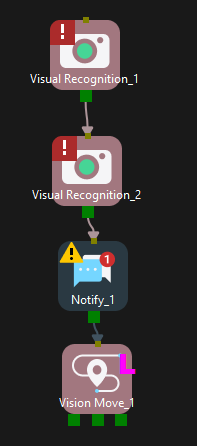
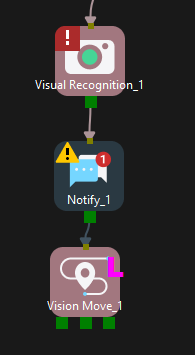
Dans Mech-Viz, ajoutez l’étape Notifier et connectez-la après l’étape Reconnaissance visuelle, comme illustré dans la figure ci-dessous. Une fois que l’étape Notifier envoie le signal Exposure_Complete au robot, celui-ci peut se déplacer immédiatement sans attendre la fin d’exécution du projet Mech-Vision.
Si plusieurs caméras sont impliquées, l’étape Notifier doit être connectée après chaque étape Reconnaissance visuelle correspondante.