Configurer la détection des collisions
La configuration des collisions est utilisée pour détecter et éviter les collisions possibles. Par défaut, les collisions entre deux éléments quelconques parmi le robot, l’outil du robot et les objets de la scène seront détectées. Une fois que Activer la détection de collision avec le nuage de points est activée, la collision entre le nuage de points d’entrée et l’outil du robot sera détectée.
-
Cliquez sur le bouton Configuration des collisions dans la barre d’outils puis sur Activer la détection de collision avec le nuage de points.
Définissez les paramètres suivants en fonction du niveau de collisions autorisé par le projet.
-
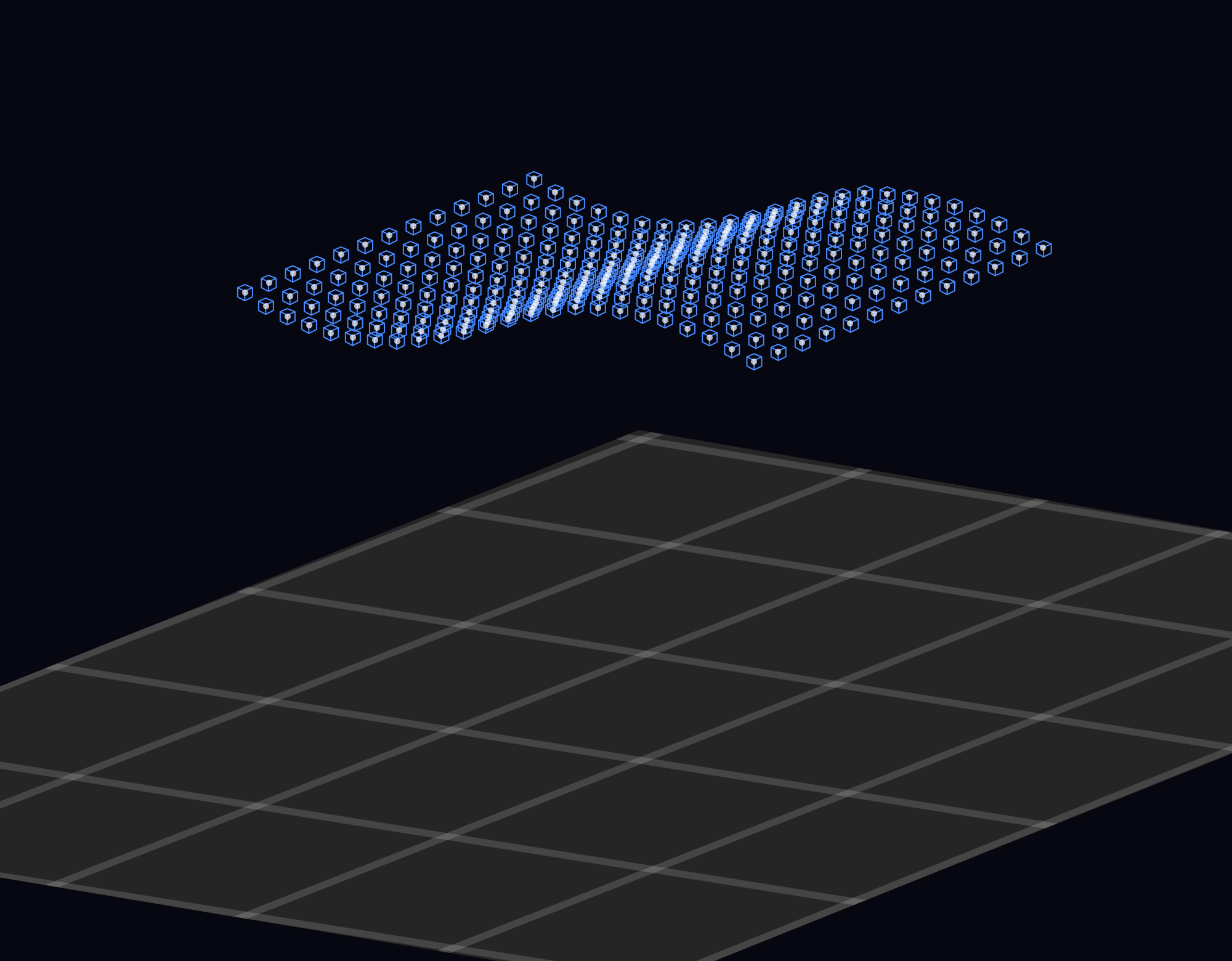
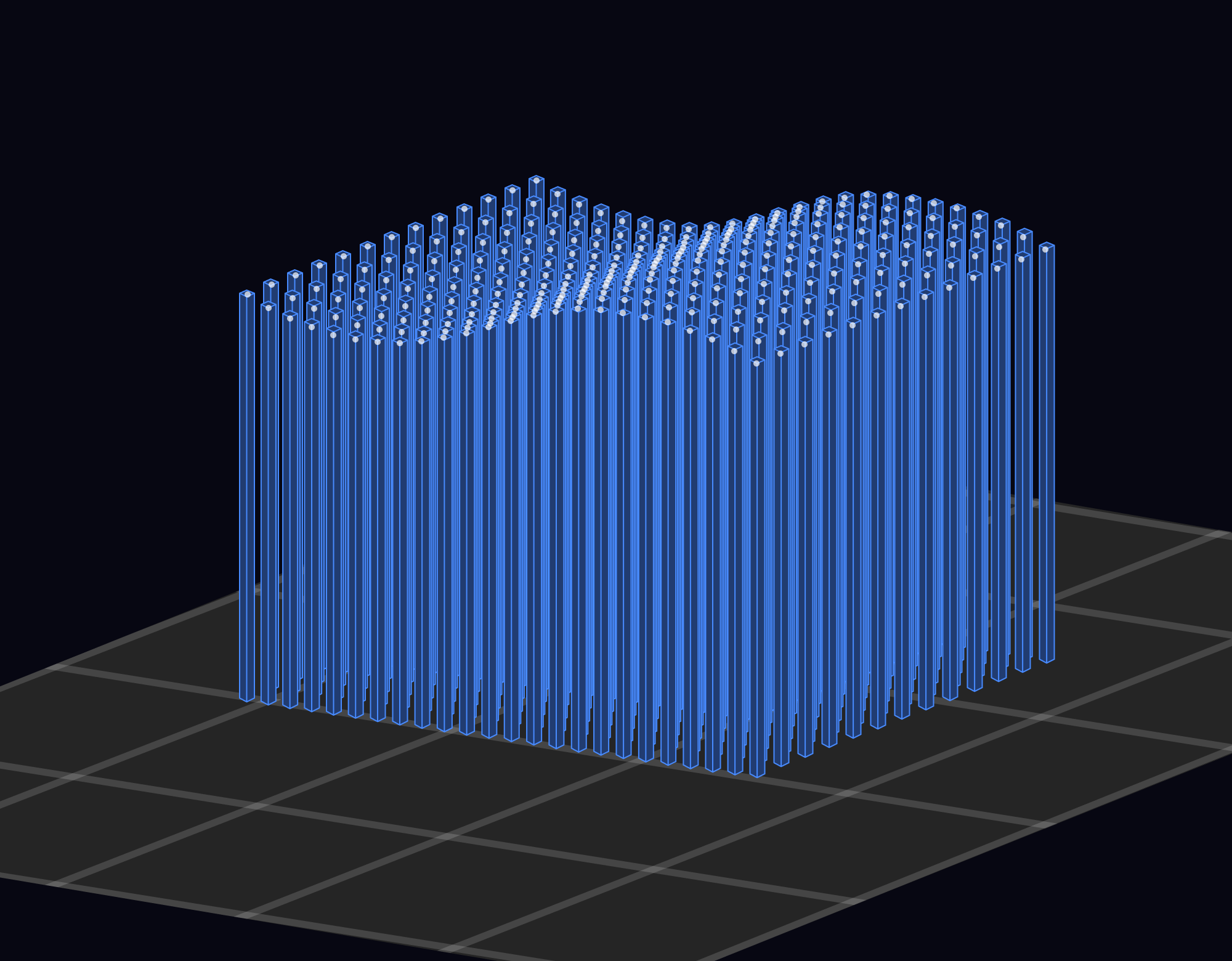
Forme du nuage de points pour la détection de collisions
Cube de nuage de points Colonne de nuage de points Remplissez la surface du nuage de points avec des cubes pour les calculs de détection de collisions.
L’espace sous le nuage de points sera rempli de colonnes orientées selon la direction négative de l’axe Z du repère mondial pour les calculs de détection de collisions. La longueur d’extension des colonnes du nuage de points dans le repère mondial peut être déterminée en définissant la Position de base de la colonne.
-
Limite supérieure du volume de collision outil-nuage de points
Lorsque le volume de collision entre l’outil et le nuage de points est supérieur au seuil défini, on considère qu’une collision se produit ; sinon, on considère qu’il n’y a pas de collision.
-
Enregistrement des collisions du nuage de points
-
Enregistrer: L’historique de planification enregistrera les positions et le nombre des nuages de points où des collisions se produisent. Lorsque l’utilisateur consulte l’historique de planification, le nuage de points enregistré sera mis en surbrillance dans la zone de simulation 3D. Cependant, sélectionner Enregistrer ralentira la vitesse d’exécution.
-
Ne pas enregistrer: L’utilisateur ne pourra pas déterminer quelle partie du nuage de points a été impliquée dans les collisions dans l’historique de planification. En revanche, la vitesse d’exécution est plus élevée lorsqu’on n’enregistre pas le nuage de points en collision.
-
-
-
Une fois la configuration terminée, cliquez sur OK.