Sélectionner le robot
Cette section explique comment sélectionner un robot.
-
Cliquez sur Configuration de la communication du robot dans la barre d’outils de Mech-Vision.
-
Sélectionnez le robot.
-
Sélectionner un robot répertorié
-
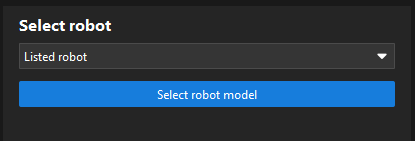
Cliquez sur la liste déroulante Sélectionner le robot, sélectionnez Robot répertorié, puis cliquez sur le bouton Sélectionner le modèle de robot.
-
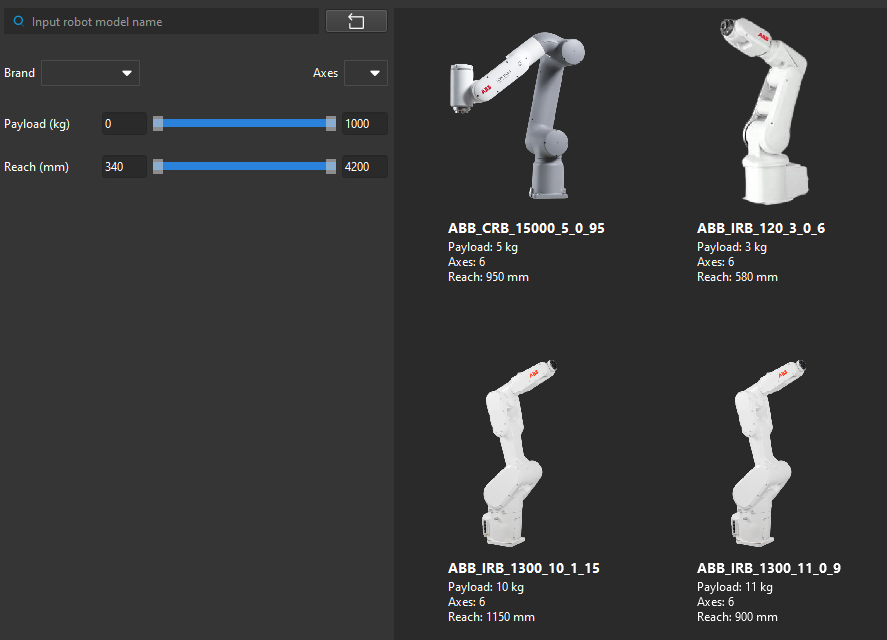
Dans la liste déroulante Marque, sélectionnez la marque du robot. Tous les modèles de robots de cette marque seront affichés dans le panneau de droite.
-
Spécifiez les paramètres Axes, Charge utile et Portée pour restreindre la liste des modèles de robot.
-
Dans la zone de recherche, saisissez la marque et le modèle du robot pour filtrer le robot. Cliquez sur le bouton
 pour effacer le texte de la zone de recherche.
pour effacer le texte de la zone de recherche.
Si vous ne parvenez pas à trouver le modèle de robot requis dans la bibliothèque de modèles de robot, fermez cette fenêtre. Veuillez d’abord importer le modèle de robot, puis réexécutez cette étape.
-
-
Placez le curseur sur le modèle de robot à sélectionner, puis cliquez sur le bouton Sélectionner lorsque le cadre devient gris-blanc pour fermer la fenêtre.
-
Cliquez sur le bouton Suivant pour accéder à l’interface Option de communication.
-
-
Sélectionner un robot personnalisé (par exemple, robot portique)
-
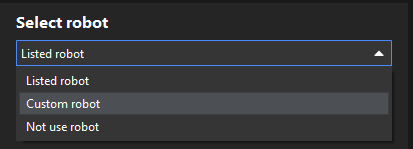
Cliquez sur la liste déroulante Sélectionner le robot et sélectionnez Robot personnalisé.
-
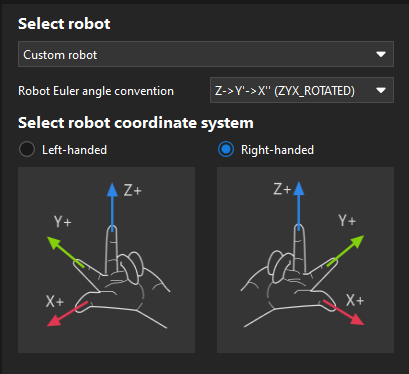
Indiquez le paramètre de convention des angles d’Euler du robot.
-
Sélectionnez le système de coordonnées du robot.
-
Cliquez sur le bouton Suivant pour accéder à l’interface Option de communication.
-
-
Choisir de ne pas utiliser de robot (dans des scénarios sans robot, comme la mesure)
-
Cliquez sur la liste déroulante Sélectionner le robot et sélectionnez Ne pas utiliser de robot.
-
Cliquez sur le bouton Suivant pour accéder à l’interface Option de communication Adaptateur.
-
-
|
Si vous sélectionnez Ne pas utiliser de robot, seule l’option de communication Adaptateur peut être utilisée. |