Mettre à jour l’objet cible tenu
Fonction
Mettre à jour la pose, les dimensions et l’étiquette de l’objet cible tenu via le service de vision ou des valeurs spécifiées. La mise à jour d’un seul objet cible est prise en charge. Lorsque le robot tient plusieurs objets cibles simultanément, tous les objets existants seront effacés et un seul nouvel objet sera conservé après la mise à jour.
| La pose de l’objet cible tenu correspond à la pose depuis la saisie de l’objet cible jusqu’à sa libération. |
Scénario d’utilisation
Convient aux scénarios où les dimensions, la pose ou les étiquettes d’un objet obtenues lors de la première capture d’image dans le processus de saisie guidée par la vision sont inexactes.
Pour éviter les collisions, il est nécessaire de configurer à l’avance les points de prise et le modèle de collision de l’objet cible dans l’éditeur d’objet cible. Après avoir réobtenu avec précision les dimensions, la pose et les étiquettes de l’objet cible tenu, une détection de collision plus précise peut être effectuée pour les flux de travail suivants.
-
L’objet cible tenu peut être un cuboïde, un cylindre vertical ou un cylindre horizontal.
-
Cette étape peut interrompre la planification de trajectoire des étapes de type déplacement.
Description
Approche de mise à jour
Il existe deux sources d’information de mise à jour, à savoir Valeur spécifiée et Service de vision.
Cliquez ici pour voir la description des autres paramètres lorsque Valeur spécifiée est sélectionnée
Adapté aux scénarios où la saisie n’est pas guidée par la vision et où les dimensions de l’objet cible ne peuvent pas être obtenues en temps réel. Une fois cette option sélectionnée, le logiciel générera un modèle de collision du Type d’objet sélectionné à l’extrémité de l’outil du robot pour la détection de collision.
| Mettre à jour l’étiquette du point de prise |
Pour activer cette fonction, veuillez saisir manuellement l’étiquette du point de prise (étiquette d’apprentissage profond ou étiquette numérique définie dans l’éditeur d’objet cible). |
| Type d’objet |
Cuboïde, Cylindre vertical et Cylindre horizontal. |
| La pose nécessite une mise à jour |
Sélectionnez pour mettre à jour la pose de l’objet cible tenu dans le repère outil, et vous devez définir les valeurs sous Mise à jour de la pose. Non sélectionné par défaut, c’est-à-dire ne pas mettre à jour la pose de l’objet cible tenu. |
| La taille nécessite une mise à jour |
Sélectionnez pour mettre à jour les dimensions de l’objet cible tenu, et vous devez définir les dimensions mises à jour dans Mise à jour de la taille. Non sélectionné par défaut, c’est-à-dire ne pas mettre à jour les dimensions de l’objet cible tenu. |
| Lorsque la forme 3D du modèle de collision définie dans l’éditeur d’objet cible diffère du Type d’objet défini ici, une erreur se produira si la pose et les dimensions de l’objet doivent toutes deux être mises à jour ; si seules les dimensions de l’objet doivent être mises à jour, le logiciel générera un nouveau modèle de collision pour l’objet cible conformément à la pose et aux dimensions de l’objet cible définies ici, pour la détection de collision. |
Cliquez ici pour voir la description des autres paramètres lorsque Service de vision est sélectionné
Le robot déplace l’objet tenu vers une position appropriée, puis une seconde image est capturée pour réacquérir les dimensions et la pose de l’objet cible tenu dans le repère mondial.
Contenu de mise à jour
| Mettre à jour l’étiquette du point de prise |
Sélectionnez pour obtenir automatiquement l’étiquette du point de prise dans le résultat de vision. |
| La pose nécessite une mise à jour |
Sélectionné par défaut, c’est-à-dire mettre à jour la pose de l’objet en TCP dans le projet. Désélectionnez pour arrêter la mise à jour de la pose de l’objet cible tenu. |
| La taille nécessite une mise à jour |
Sélectionné par défaut, c’est-à-dire mettre à jour les dimensions de l’objet cible tenu dans le projet. Désélectionnez pour arrêter la mise à jour des dimensions de l’objet cible tenu. |
| Lorsque la forme 3D du modèle de collision définie dans l’éditeur d’objet cible diffère du Type d’objet défini ici, la pose et les dimensions de l’objet cible tenu ne peuvent pas être mises à jour. |
Pré-planification du mouvement
| Port de sortie du pré-plan |
Pour rendre continu le processus de planification de trajectoire dans l’application réelle, le logiciel effectuera au préalable une pré-planification en arrière-plan. Spécifier un port de sortie du pré-plan le long duquel le projet est le plus susceptible de se poursuivre peut réduire la probabilité de replanification et le temps d’attente du robot.
|
Seuil de mise à jour
| Nécessite une vérification de précision |
Utilisé pour déterminer si les informations de l’objet cible doivent être mises à jour. Une fois sélectionnée, l’étape comparera les deux résultats de vision. Si la différence de pose ou de dimensions de l’objet cible entre les deux résultats de vision dépasse le Seuil de taille, le Seuil de translation ou le Seuil de rotation correspondant, la pose ou les dimensions seront mises à jour. Une fois désélectionnée, les informations de l’objet cible seront mises à jour par défaut. |
Nom du service de vision
Sélectionnez le projet Mech-Vision utilisé pour la seconde capture d’image dans la même solution.
Exemple d’utilisation
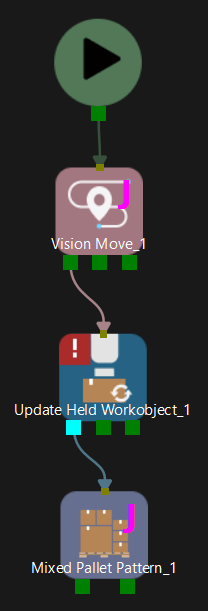
Lorsque l’étape Mettre à jour l’objet cible tenu est utilisée conjointement avec l’étape Palettisation de cartons mixtes, le paramètre Capturer deux fois pour mettre à jour la taille du carton sous Type de palette > Placer par lâcher parmi les paramètres de l’étape Palettisation de cartons mixtes doit être sélectionné. L’utilisation fixe est illustrée dans la figure ci-dessous, c’est-à-dire que cette étape doit être placée après l’étape Déplacement par vision et avant l’étape Palettisation de cartons mixtes.