Trajectoire intelligente dans le bac
Fonction
Basée sur des informations telles que les modèles de bac et d’objet cible, cette Étape peut générer automatiquement des trajectoires permettant aux robots d’entrer dans le bac, de saisir l’objet cible et de sortir du bac.
Prérequis
-
Cette Étape ne peut être utilisée qu’en conjonction avec l’Étape Déplacement visuel. De plus, la Méthode de prélèvement définie dans l’Étape Déplacement visuel doit être « Prélèvement standard ».
-
L’Étape ne peut pas être placée à la fin du flux de travail. Elle doit être suivie d’une Étape de type déplacement avec un point de passage fixe.
-
Lors de l’utilisation de cette Étape, il est nécessaire d’activer Détection de collisions sur le nuage de points et Détecter les collisions sur les objets cibles dans le panneau Collisions.
-
L’Étape Trajectoire intelligente dans le bac doit être ajoutée pour les trajectoires d’entrée et de sortie du bac.
|
Chaque Étape Trajectoire intelligente dans le bac correspond à deux points de passage. Lorsque le Stade de prélèvement est défini sur Avant le prélèvement, les points de passage correspondants sont Point d’approche et Point d’entrée dans le bac. Lorsque leStade de prélèvement est défini sur Après le prélèvement, les points de passage correspondants sont Point de retrait et Point de sortie du bac. Différentes stratégies affecteront le point de passage le plus proche du point de préhension, c’est-à-dire que le Point d’approche sera affecté lors de l’entrée dans le bac, et le Point de retrait sera affecté lors de la sortie du bac. Lors de l’écriture du programme de communication du robot, il est important de recevoir les deux points de passage. Veuillez vous référer à Programme d’exemple pour une description détaillée. |
Scénario d’application
Cette Étape est conçue pour les applications de prélèvement en bac. Elle peut tenter plusieurs trajectoires d’entrée et de sortie du bac et éviter les collisions avec le bac et les objets cibles environnants pendant le prélèvement, améliorant ainsi le taux de vidage du bac.
Description des paramètres
Autoriser la rotation de l’outil dans le bac
Lorsque non sélectionné, l’orientation des points de passage à l’intérieur du bac est identique à celle du point de préhension. Lorsque sélectionné, le logiciel ajuste automatiquement l’orientation des points de passage à l’intérieur du bac afin de lisser la trajectoire de mouvement du robot. Cependant, l’outil du robot pivote tout en tenant l’objet cible, ce qui entraîne un risque accru de collision dans le bac et une probabilité accrue d’échec de la planification de trajectoire.
Type de mouvement pour le segment 1/2
Pour la trajectoire d’entrée dans le bac, c’est-à-dire avec le stade de prélèvement défini sur Avant le prélèvement, il est recommandé de sélectionner Mouvement articulé pour le segment 1, et Mouvement linéaire pour le segment 2.
Pour la trajectoire de sortie du bac, c’est-à-dire avec le stade de prélèvement défini sur Après le prélèvement, il est recommandé de sélectionner Mouvement linéaire pour le segment 1, et Mouvement articulé pour le segment 2.
Évitement des singularités
Lorsque le type de mouvement est Déplacement linéaire, l’activation de cette fonction peut simuler un déplacement linéaire par un déplacement articulé en plusieurs segments, réduisant ainsi les problèmes de singularité dans une certaine mesure.
Paramètres de configuration
| Limiter aux segments de mouvement | Nombre spécifique | Sans limite |
|---|---|---|
Fonctionnalité |
Simuler un déplacement linéaire en utilisant un déplacement articulé avec un nombre de segments spécifié par l’utilisateur. |
Le logiciel calcule le nombre de segments nécessaires pour simuler un déplacement linéaire. |
Avantages |
|
|
Inconvénients |
|
|
| Paramètre | Description |
|---|---|
Nombre de segments |
Le nombre de segments de déplacement articulé spécifié par l’utilisateur lorsque Limiter aux segments de mouvement est réglé sur Nombre spécifique. |
Déviation maximale de position |
La déviation maximale autorisée de la nouvelle trajectoire articulée multi-segments par rapport à la trajectoire linéaire originale. Plus la déviation maximale de position est grande, plus le taux de réussite de l’évitement des singularités est élevé, et plus la similitude entre la trajectoire réelle et la ligne droite est faible. |
Déviation angulaire maximale |
La déviation angulaire maximale autorisée de la nouvelle trajectoire articulée multi-segments par rapport à la trajectoire linéaire originale. Plus la déviation angulaire maximale est grande, plus le taux de réussite de l’évitement des singularités est élevé, et plus la similitude entre la trajectoire réelle et la ligne droite est faible. |
Vitesse et accélération
La vitesse et l’accélération déterminent la rapidité de déplacement du robot. En général, l’accélération définie doit être inférieure à la vitesse. Lorsque l’accélération définie est supérieure à la vitesse, le robot se déplacera de manière saccadée.
| Les vitesses de Mouvement de vision et des Étapes antérieures et ultérieures doivent être relativement faibles afin de garantir que les objets puissent être prélevés de manière stable. |
Rayon d’arrondi
En général, la configuration par défaut peut être utilisée.
-
Le rayon d’arrondi désigne la distance entre le point cible et le point où le robot commence à tourner. Plus le rayon d’arrondi est grand, plus les transitions de mouvement du robot sont fluides. Si le robot se déplace dans un espace relativement petit, veuillez définir un rayon d’arrondi plus faible.
-
Si le robot se déplace dans un espace relativement grand sans obstacles et que la distance entre deux segments de trajectoire consécutifs est longue, veuillez définir un rayon d’arrondi plus grand.
Stade de prélèvement
Si vous êtes à l’étape d’entrée dans le bac pour préparer le prélèvement, sélectionnez Avant le prélèvement. À ce moment, l’Étape « Trajectoire intelligente dans le bac » doit se situer avant l’Étape Déplacement visuel. Si vous êtes à l’étape où l’objet cible est tenu et que vous quittez le bac, sélectionnez Après le prélèvement. À ce moment, l’Étape « Trajectoire intelligente dans le bac » doit se situer après l’Étape Déplacement visuel.
Sélection du bac
Veuillez sélectionner le bac ajouté dans Objets de la scène dans l’arborescence des ressources du projet. Veuillez vous référer à Ajouter un objet de scène pour des instructions détaillées.
Mode de stratégie
-
Lorsque Auto est sélectionné, le logiciel calculera automatiquement la trajectoire de prélèvement.
Les stratégies de prélèvement en mode Auto sont présentées dans le tableau ci-dessous.
Stratégie d’entrée dans le bac Stratégie de sortie du bac 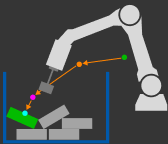
Entrer selon l’axe Z du point de préhension: Tenter de trouver des positions sans collision au-dessus de l’objet cible selon l’axe Z de son point de préhension.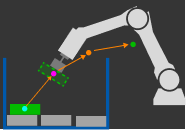
Soulever à l’écart des parois du bac: Pour éviter une collision avec les parois du bac, tenter de soulever l’objet cible vers le centre de la surface supérieure du bac.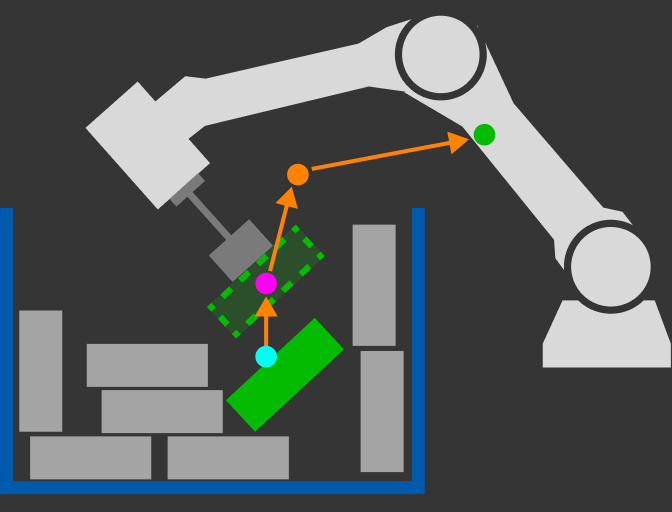
Soulever selon l’axe Z du repère monde: Tenter de soulever l’objet cible selon l’axe Z du repère monde. -
Lorsque Manuel est sélectionné, vous devez choisir au moins une stratégie de prélèvement. Vous pouvez personnaliser la stratégie d’essai, la séquence des essais, et ajuster la distance de déplacement du robot en fonction de la stratégie sélectionnée. Par rapport au mode Auto, Soulever selon l’axe Z du point de préhension et Traîner horizontalement sont ajoutés au mode Manuel.
Dans les scénarios suivants, le mode Manuel est recommandé.
-
Si le robot doit quitter le bac selon la direction de l’axe Z du point de préhension, la stratégie Soulever selon l’axe Z du point de préhension peut être utilisée.
-
Si le robot doit extraire horizontalement l’objet cible superposé, la stratégie Traîner horizontalement peut être utilisée.
-
Lorsque l’objet cible est haut et que la Distance de levage tentée calculée automatiquement est insuffisante, une Distance de levage tentée doit être définie manuellement.
-
Pour améliorer le temps de cycle, une seule stratégie de sortie du bac est souhaitée.
Les stratégies de prélèvement en mode Manuel sont présentées dans le tableau ci-dessous.
Stratégie d’entrée dans le bac Stratégie de sortie du bac
Entrer selon l’axe Z du point de préhension: Tenter de trouver des positions sans collision au-dessus de l’objet cible selon l’axe Z de son point de préhension. Jusqu’à 5 distances au-dessus de l’objet peuvent être définies, et le logiciel tentera selon les distances définies, à tour de rôle.
Soulever à l’écart des parois du bac: Pour éviter une collision avec les parois du bac, tenter de soulever l’objet cible vers le centre de la surface supérieure du bac. Jusqu’à 5 distances de levage tentées peuvent être définies, et le logiciel tentera selon les distances définies, à tour de rôle.
Soulever selon l’axe Z du repère monde: Tenter de soulever l’objet cible selon l’axe Z du repère monde. Jusqu’à 5 distances de levage tentées peuvent être définies, et le logiciel tentera selon les distances définies, à tour de rôle.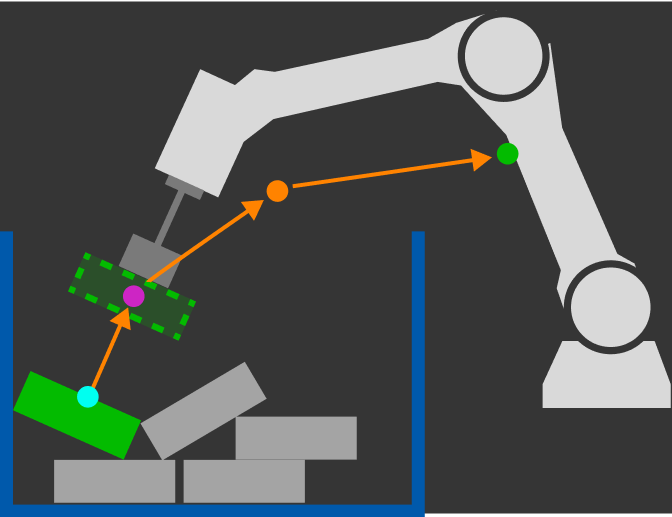
Soulever selon l’axe Z du point de préhension: Tenter de soulever l’objet cible selon l’axe Z de son point de préhension. Jusqu’à 5 distances de levage tentées peuvent être définies, et le logiciel tentera selon les distances définies, à tour de rôle.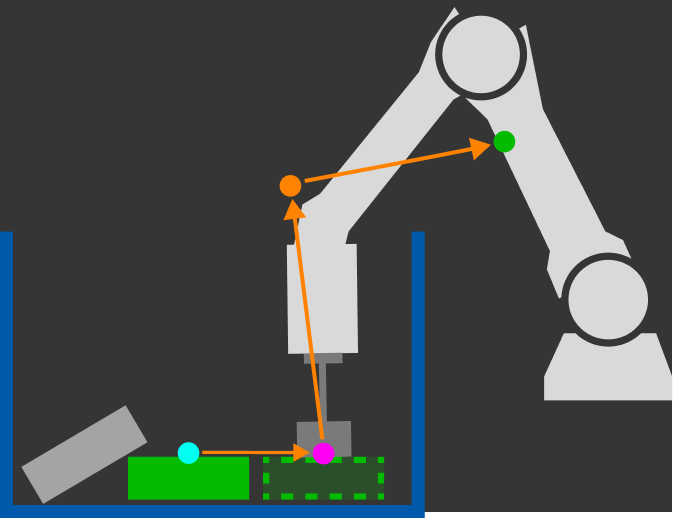
Traîner horizontalement: Sur le plan horizontal où se trouve le point de préhension de l’objet cible, tenter de traîner l’objet cible vers le centre du bac. Jusqu’à 5 distances de traînage tentées peuvent être définies, et le logiciel tentera selon les distances définies, à tour de rôle.
-
Exemples d’application
Veuillez vous référer au projet d’exemple Trajectoire intelligente dans le bac.