Se déplacer le long d’une ligne
Fonction
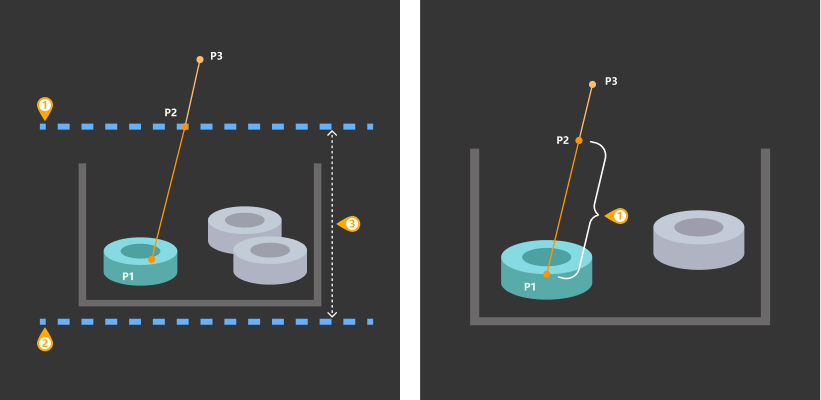
À partir du point de référence, se déplacer d’une certaine distance le long de la ligne reliant le point de référence et la position spécifiée.
Scénario d’utilisation
Il est applicable à la préhension dans des bacs profonds. Typiquement, le point de référence peut être défini au-dessus du centre du bac, ce qui permet au robot de se déplacer en ligne droite lors de l’entrée et de la sortie du bac. Cela minimise le contact avec les parois du bac et réduit le risque de collisions, augmentant ainsi le taux de réussite de la préhension.
Description des paramètres
Paramètres communs des étapes de type déplacement
Envoyer le point de passage
Sélectionné par défaut, c’est-à-dire envoyer le point de passage actuel au récepteur, tel que le robot. Une fois désélectionné, le point de passage actuel ne sera pas envoyé. Cependant, le point de passage restera dans le trajet planifié.
Essayer une exécution continue à travers les étapes non-déplacement suivantes
Non sélectionné par défaut. Lorsque des Étapes non-déplacement, telles que Reconnaissance visuelle, Régler DO, Vérifier DI, etc., sont connectées entre des Étapes de type déplacement, l’envoi des points de passage sera interrompu, et le robot réel marquera une courte pause, ce qui réduit la fluidité de l’exécution.
Lorsque ce paramètre est sélectionné, le projet continuera à s’exécuter sans attendre que l’Étape de type déplacement en cours ait terminé son exécution, et le robot pourra ainsi se déplacer de manière fluide, sans pauses. Cependant, sélectionner ce paramètre peut entraîner la fin prématurée de l’exécution de l’Étape.
Pourquoi cette fonctionnalité peut-elle provoquer la fin prématurée de l’exécution de l’Étape ?
Mech-Viz enverra simultanément plusieurs points de passage au robot lorsque le projet s’exécute. Lorsque les JPs actuellement renvoyés par le robot correspondent au dernier point de passage envoyé par Mech-Viz, Mech-Viz supposera que le robot s’est déplacé jusqu’au dernier point de passage.
Par exemple, il y a 10 Étapes de type déplacement dans un trajet, et la pose de la 5e Étape de type déplacement est identique à celle de la dernière Étape de type déplacement. Lorsque le robot se déplace à faible vitesse, les JPs courants seront envoyés à Mech-Viz après que le robot aura atteint le 5e point de passage. Étant donné que les poses de la 5e Étape de type déplacement et de la dernière Étape de type déplacement sont identiques, Mech-Viz peut déterminer par erreur que le robot a atteint tous les points de passage et terminer la commande de manière prématurée.
Ne pas vérifier la collision avec l’objet cible déposé
Une fois Détecter les collisions sur les objets cibles activé dans le panneau Collisions, sélectionner ce paramètre désactivera la détection de collision entre le robot, l’outil du robot et les objets cibles déposés. En général, ce paramètre est sélectionné dans l’Étape de type déplacement suivant l’Étape dont Prendre ou déposer est défini sur Déposer, afin d’éviter des détections de collision erronées.
Exemple d’application :
Le TCP d’un préhenseur à vide de dépalletisation est généralement défini à l’intérieur du modèle plutôt que sur la surface du préhenseur à vide. En conséquence, lors de la prise d’une boîte, le modèle du préhenseur à vide peut chevaucher le modèle de la boîte. Cependant, le logiciel ne détecte pas les collisions entre l’outil terminal et l’objet cible saisi, de sorte qu’aucune alarme de collision ne sera déclenchée pendant la prise. Une fois que le robot dépose la boîte, le modèle de la boîte saisie devient un modèle de scène, et le logiciel commencera à détecter la collision entre l’outil terminal et le modèle de scène de la boîte, ce qui déclenchera une alarme de collision et empêchera l’achèvement de la tâche de palettisation.
Une fois ce paramètre sélectionné, aucune collision entre le robot, l’outil terminal et le modèle de l’objet cible déposé ne sera détectée, et le problème ci-dessus sera résolu.
Mode de détection de collision par nuage de points
En général, Auto peut être sélectionné, c’est-à-dire appliquer directement les paramètres de Détection de collision par nuage de points dans le panneau Collisions. Pour les Étapes entre la prise et la dépose, Vérifier la collision peut généralement être sélectionné.
Auto |
Paramètre par défaut. Une fois Détecter les collisions sur les objets cibles activé dans le panneau Collisions, seules les collisions de nuage de points de l’Étape « Déplacement par vision » et des Étapes « Déplacement relatif » qui dépendent de l’Étape « Déplacement par vision » seront détectées, tandis que les autres Étapes de type déplacement ne seront pas détectées. |
Ne pas vérifier la collision |
Les collisions de nuage de points de toutes les Étapes de type déplacement ne seront pas détectées. |
Vérifier la collision |
Les collisions de nuage de points de toutes les Étapes de type déplacement seront détectées. |
Ignorer la symétrie de l’objet cible
Ce paramètre n’est visible que lorsque le Type de point de passage de l’Étape de type déplacement est défini sur Pose de l’objet cible.
La symétrie de l’objet cible mentionnée ici fait référence à la Symétrie de rotation de l’objet cible tenu prédéfinie dans l’éditeur d’objet cible lors de configuration du modèle de collision.
Aucune |
Paramètre par défaut, c’est-à-dire n’ignorer la symétrie sur aucun axe. |
Autour de l’axe Z du repère de l’objet cible |
Ignorer uniquement la symétrie autour de l’axe Z. |
Autour des axes X&Y du repère de l’objet cible |
Ignorer la symétrie autour des axes X et Y. |
Autour de tous les axes |
Une fois la symétrie autour de tous les axes ignorée, le robot déposera l’objet strictement selon la pose de l’objet cible. |
| Lorsque des Étapes de type déplacement sont utilisées pour déposer les objets cibles, la cohérence des poses de dépose des objets cibles ne peut pas être garantie dès lors que la symétrie de rotation est appliquée. Si vous souhaitez que tous les objets cibles soient déposés strictement selon une règle spécifique, ignorez la symétrie de l’objet cible autour de tous les axes. |
Port de sortie en cas d’échec de planification
Une fois ce paramètre sélectionné, un port de sortie Échec de planification sera ajouté à l’Étape.
Si la planification de trajectoire de l’Étape actuelle réussit, le flux de travail continuera le long du port de sortie Succès. Si la planification de trajectoire de l’Étape actuelle échoue, le flux de travail poursuivra le long du port de sortie Échec de planification. Si plusieurs Étapes de type déplacement avec des ports de sortie « Échec de planification » s’affichent dans la même entrée d’historique de planification, le flux de travail poursuivra le long du port de sortie « Échec de planification » de la première Étape de type déplacement.
Paramètres de détection des collisions pour l’objet cible tenu
Avant de configurer ce groupe de paramètres, veuillez accéder au panneau Collisions et activer Détecter les collisions sur les objets cibles.
| La désactivation de la détection des collisions augmentera les risques de collision. Veuillez sélectionner les paramètres suivants avec précaution. |
Ne pas vérifier les collisions avec les objets de la scène
Une fois ce paramètre sélectionné, les collisions entre l’objet cible tenu et le modèle de scène ne seront pas détectées, ce qui réduit la charge de calcul de la détection des collisions dans le logiciel, accélère la planification de trajectoire et optimise le temps de cycle global.
Ne pas vérifier les collisions avec le robot
Une fois ce paramètre sélectionné, les collisions entre l’objet cible tenu et le robot ne seront pas détectées, ce qui réduit la charge de calcul de la détection des collisions dans le logiciel, accélère la planification de trajectoire et optimise le temps de cycle global.
Ne pas vérifier les collisions avec le nuage de points
Une fois la Détection des collisions avec le nuage de points activée dans le panneau Collisions, la sélection de ce paramètre arrêtera la détection des collisions entre l’objet cible tenu et le nuage de points, réduisant davantage la charge de calcul du logiciel, raccourcissant le temps de planification de trajectoire et améliorant le temps de cycle global.
Paramètres de déplacement de base
Type de mouvement
Déplacement articulé |
Mouvement articulaire, qui guide le robot pour suivre une trajectoire courbe. Le mouvement articulaire est moins susceptible d’atteindre des singularités le long de la trajectoire.
|
Déplacement linéaire |
Mouvement linéaire, qui guide le robot à se déplacer de manière linéaire.
|
Évitement des singularités
Lorsque le type de mouvement est Déplacement linéaire, l’activation de cette fonction peut simuler un déplacement linéaire par un déplacement articulé en plusieurs segments, réduisant ainsi les problèmes de singularité dans une certaine mesure.
Paramètres de configuration
| Limiter aux segments de mouvement | Nombre spécifique | Sans limite |
|---|---|---|
Fonctionnalité |
Simuler un déplacement linéaire en utilisant un déplacement articulé avec un nombre de segments spécifié par l’utilisateur. |
Le logiciel calcule le nombre de segments nécessaires pour simuler un déplacement linéaire. |
Avantages |
|
|
Inconvénients |
|
|
| Paramètre | Description |
|---|---|
Nombre de segments |
Le nombre de segments de déplacement articulé spécifié par l’utilisateur lorsque Limiter aux segments de mouvement est réglé sur Nombre spécifique. |
Déviation maximale de position |
La déviation maximale autorisée de la nouvelle trajectoire articulée multi-segments par rapport à la trajectoire linéaire originale. Plus la déviation maximale de position est grande, plus le taux de réussite de l’évitement des singularités est élevé, et plus la similitude entre la trajectoire réelle et la ligne droite est faible. |
Déviation angulaire maximale |
La déviation angulaire maximale autorisée de la nouvelle trajectoire articulée multi-segments par rapport à la trajectoire linéaire originale. Plus la déviation angulaire maximale est grande, plus le taux de réussite de l’évitement des singularités est élevé, et plus la similitude entre la trajectoire réelle et la ligne droite est faible. |
Vitesse et accélération
La vitesse et l’accélération déterminent la rapidité de déplacement du robot. En général, l’accélération définie doit être inférieure à la vitesse. Lorsque l’accélération définie est supérieure à la vitesse, le robot se déplacera de manière saccadée.
| Les vitesses de Mouvement de vision et des Étapes antérieures et ultérieures doivent être relativement faibles afin de garantir que les objets puissent être prélevés de manière stable. |
Rayon d’arrondi
En général, la configuration par défaut peut être utilisée.
-
Le rayon d’arrondi désigne la distance entre le point cible et le point où le robot commence à tourner. Plus le rayon d’arrondi est grand, plus les transitions de mouvement du robot sont fluides. Si le robot se déplace dans un espace relativement petit, veuillez définir un rayon d’arrondi plus faible.
-
Si le robot se déplace dans un espace relativement grand sans obstacles et que la distance entre deux segments de trajectoire consécutifs est longue, veuillez définir un rayon d’arrondi plus grand.
Mode de déplacement
Se déplacer d’une certaine distance |
À partir du point de référence, se déplacer d’une certaine distance le long de la ligne reliant le point de référence et la position spécifiée. L’orientation du point de passage cible est identique à celle du point de référence. |
Se déplacer vers un plan spécifié |
À partir du point de référence, se déplacer d’une certaine distance le long de la ligne reliant le point de référence et la position spécifiée jusqu’à la hauteur spécifiée. L’orientation du point de passage cible est identique à celle du point de référence. |
Se déplacer d’une certaine distance
| Point de référence |
Sélectionnez le point à utiliser comme référence pour le déplacement du robot. |
| Position spécifiée |
Spécifiez une position dans le repère du robot afin de définir la direction de la ligne. |
| Distance de déplacement |
Spécifiez la distance que le robot doit parcourir le long de la ligne. |
Se déplacer vers un plan spécifié
| Point de référence |
Sélectionnez le point à utiliser comme référence pour le déplacement du robot. |
| Position spécifiée |
Spécifiez une position dans le repère du robot afin de définir la direction de la ligne. |
| Hauteur du plan |
Spécifiez la hauteur du point de passage cible dans le repère du robot. |