Dépalettisation de boîtes—Plusieurs à la fois
Lorsque la Méthode de prise est définie sur Dépalettisation de boîtes, et que le Mode de dépalettisation est défini sur Plusieurs à la fois, vous pouvez configurer les paramètres suivants.
En outre, vous devez vous référer à Configurer l’outil terminal pour configurer l’outil terminal correspondant.
Paramètres communs des étapes de type déplacement
Envoyer le point de passage
Sélectionné par défaut, c’est-à-dire envoyer le point de passage actuel au récepteur, tel que le robot. Une fois désélectionné, le point de passage actuel ne sera pas envoyé. Cependant, le point de passage restera dans le trajet planifié.
Essayer une exécution continue à travers les étapes non-déplacement suivantes
Non sélectionné par défaut. Lorsque des Étapes non-déplacement, telles que Reconnaissance visuelle, Régler DO, Vérifier DI, etc., sont connectées entre des Étapes de type déplacement, l’envoi des points de passage sera interrompu, et le robot réel marquera une courte pause, ce qui réduit la fluidité de l’exécution.
Lorsque ce paramètre est sélectionné, le projet continuera à s’exécuter sans attendre que l’Étape de type déplacement en cours ait terminé son exécution, et le robot pourra ainsi se déplacer de manière fluide, sans pauses. Cependant, sélectionner ce paramètre peut entraîner la fin prématurée de l’exécution de l’Étape.
Pourquoi cette fonctionnalité peut-elle provoquer la fin prématurée de l’exécution de l’Étape ?
Mech-Viz enverra simultanément plusieurs points de passage au robot lorsque le projet s’exécute. Lorsque les JPs actuellement renvoyés par le robot correspondent au dernier point de passage envoyé par Mech-Viz, Mech-Viz supposera que le robot s’est déplacé jusqu’au dernier point de passage.
Par exemple, il y a 10 Étapes de type déplacement dans un trajet, et la pose de la 5e Étape de type déplacement est identique à celle de la dernière Étape de type déplacement. Lorsque le robot se déplace à faible vitesse, les JPs courants seront envoyés à Mech-Viz après que le robot aura atteint le 5e point de passage. Étant donné que les poses de la 5e Étape de type déplacement et de la dernière Étape de type déplacement sont identiques, Mech-Viz peut déterminer par erreur que le robot a atteint tous les points de passage et terminer la commande de manière prématurée.
Ne pas vérifier la collision avec l’objet cible déposé
Une fois Détecter les collisions sur les objets cibles activé dans le panneau Collisions, sélectionner ce paramètre désactivera la détection de collision entre le robot, l’outil du robot et les objets cibles déposés. En général, ce paramètre est sélectionné dans l’Étape de type déplacement suivant l’Étape dont Prendre ou déposer est défini sur Déposer, afin d’éviter des détections de collision erronées.
Exemple d’application :
Le TCP d’un préhenseur à vide de dépalletisation est généralement défini à l’intérieur du modèle plutôt que sur la surface du préhenseur à vide. En conséquence, lors de la prise d’une boîte, le modèle du préhenseur à vide peut chevaucher le modèle de la boîte. Cependant, le logiciel ne détecte pas les collisions entre l’outil terminal et l’objet cible saisi, de sorte qu’aucune alarme de collision ne sera déclenchée pendant la prise. Une fois que le robot dépose la boîte, le modèle de la boîte saisie devient un modèle de scène, et le logiciel commencera à détecter la collision entre l’outil terminal et le modèle de scène de la boîte, ce qui déclenchera une alarme de collision et empêchera l’achèvement de la tâche de palettisation.
Une fois ce paramètre sélectionné, aucune collision entre le robot, l’outil terminal et le modèle de l’objet cible déposé ne sera détectée, et le problème ci-dessus sera résolu.
Mode de détection de collision par nuage de points
En général, Auto peut être sélectionné, c’est-à-dire appliquer directement les paramètres de Détection de collision par nuage de points dans le panneau Collisions. Pour les Étapes entre la prise et la dépose, Vérifier la collision peut généralement être sélectionné.
Auto |
Paramètre par défaut. Une fois Détecter les collisions sur les objets cibles activé dans le panneau Collisions, seules les collisions de nuage de points de l’Étape « Déplacement par vision » et des Étapes « Déplacement relatif » qui dépendent de l’Étape « Déplacement par vision » seront détectées, tandis que les autres Étapes de type déplacement ne seront pas détectées. |
Ne pas vérifier la collision |
Les collisions de nuage de points de toutes les Étapes de type déplacement ne seront pas détectées. |
Vérifier la collision |
Les collisions de nuage de points de toutes les Étapes de type déplacement seront détectées. |
Ignorer la symétrie de l’objet cible
Ce paramètre n’est visible que lorsque le Type de point de passage de l’Étape de type déplacement est défini sur Pose de l’objet cible.
La symétrie de l’objet cible mentionnée ici fait référence à la Symétrie de rotation de l’objet cible tenu prédéfinie dans l’éditeur d’objet cible lors de configuration du modèle de collision.
Aucune |
Paramètre par défaut, c’est-à-dire n’ignorer la symétrie sur aucun axe. |
Autour de l’axe Z du repère de l’objet cible |
Ignorer uniquement la symétrie autour de l’axe Z. |
Autour des axes X&Y du repère de l’objet cible |
Ignorer la symétrie autour des axes X et Y. |
Autour de tous les axes |
Une fois la symétrie autour de tous les axes ignorée, le robot déposera l’objet strictement selon la pose de l’objet cible. |
| Lorsque des Étapes de type déplacement sont utilisées pour déposer les objets cibles, la cohérence des poses de dépose des objets cibles ne peut pas être garantie dès lors que la symétrie de rotation est appliquée. Si vous souhaitez que tous les objets cibles soient déposés strictement selon une règle spécifique, ignorez la symétrie de l’objet cible autour de tous les axes. |
Port de sortie en cas d’échec de planification
Une fois ce paramètre sélectionné, un port de sortie Échec de planification sera ajouté à l’Étape.
Si la planification de trajectoire de l’Étape actuelle réussit, le flux de travail continuera le long du port de sortie Succès. Si la planification de trajectoire de l’Étape actuelle échoue, le flux de travail poursuivra le long du port de sortie Échec de planification. Si plusieurs Étapes de type déplacement avec des ports de sortie « Échec de planification » s’affichent dans la même entrée d’historique de planification, le flux de travail poursuivra le long du port de sortie « Échec de planification » de la première Étape de type déplacement.
Paramètres de détection des collisions pour l’objet cible tenu
Avant de configurer ce groupe de paramètres, veuillez accéder au panneau Collisions et activer Détecter les collisions sur les objets cibles.
| La désactivation de la détection des collisions augmentera les risques de collision. Veuillez sélectionner les paramètres suivants avec précaution. |
Ne pas vérifier les collisions avec les objets de la scène
Une fois ce paramètre sélectionné, les collisions entre l’objet cible tenu et le modèle de scène ne seront pas détectées, ce qui réduit la charge de calcul de la détection des collisions dans le logiciel, accélère la planification de trajectoire et optimise le temps de cycle global.
Ne pas vérifier les collisions avec le robot
Une fois ce paramètre sélectionné, les collisions entre l’objet cible tenu et le robot ne seront pas détectées, ce qui réduit la charge de calcul de la détection des collisions dans le logiciel, accélère la planification de trajectoire et optimise le temps de cycle global.
Ne pas vérifier les collisions avec le nuage de points
Une fois la Détection des collisions avec le nuage de points activée dans le panneau Collisions, la sélection de ce paramètre arrêtera la détection des collisions entre l’objet cible tenu et le nuage de points, réduisant davantage la charge de calcul du logiciel, raccourcissant le temps de planification de trajectoire et améliorant le temps de cycle global.
Utilisation globale du résultat de vision
Toutes les poses de vision en un seul déplacement
Scénario d’utilisation
Ce paramètre est généralement utilisé lorsque le robot se déplace de manière continue le long d’un chemin fixe défini par tous les points de vision à la suite, sans envoyer de signaux DO, comme dans des applications basées sur des trajectoires telles que le collage et le soudage.
Description
En général, « Déplacement par vision » n’utilisera qu’un seul point de prélèvement dans le résultat de vision. Cependant, une fois ce paramètre sélectionné, le robot se déplacera en une seule fois à travers tous les points de passage correspondant aux points de prélèvement du résultat de vision.
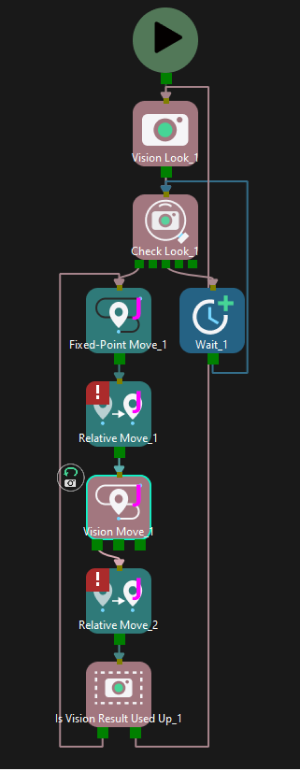
Réutiliser le résultat de vision
Scénario d’utilisation
Ce paramètre est principalement utilisé dans des scénarios où une image capturée sert à guider plusieurs prélèvements, comme la dépalettisation, à condition que le prélèvement de n’importe quel objet n’affecte pas les poses des autres objets.
Description
Lorsque ce paramètre n’est pas sélectionné, chaque fois que « Déplacement par vision » planifie avec succès une trajectoire de prélèvement pour le robot, les autres points de prélèvement non utilisés seront abandonnés.
Si ce paramètre est activé, les points de prélèvement non utilisés et ceux qui ont échoué lors de la planification précédente seront conservés et utilisés dans la planification suivante. Le même résultat de vision sera réutilisé pour plusieurs prélèvements jusqu’à ce que tous les points de prélèvement aient été utilisés, sans qu’il soit nécessaire de capturer une nouvelle image.
Cette fonctionnalité doit être utilisée avec l’étape « Les points de prélèvement sont-ils épuisés ».
Exemple d’application
Partager le résultat de vision
Scénario d’utilisation
Ce paramètre s’applique lorsque plusieurs étapes « Déplacement par vision » sélectionnent le même service de vision et doivent partager le même résultat de vision.
Description
Ce paramètre permet à plusieurs étapes « Déplacement par vision » dans lesquelles le même service de vision est sélectionné de partager le résultat de vision.
Lorsqu’une étape « Déplacement par vision » planifie avec succès, le point de prélèvement correspondant sera utilisé, et le point de prélèvement restant non utilisé sera conservé et utilisé par d’autres étapes « Déplacement par vision » qui partagent le même résultat de vision. Après que toutes les étapes « Déplacement par vision » partageant le résultat de vision ont terminé la planification, les points de prélèvement restants seront abandonnés.
Cette fonctionnalité peut être utilisée conjointement avec la fonctionnalité « Réutiliser le résultat de vision ». Si « Réutiliser le résultat de vision » est également activé, les points de prélèvement restants ne seront pas abandonnés même après que toutes les étapes « Déplacement par vision » partagées ont terminé la planification dans le cycle en cours, mais seront conservés pour une réutilisation au cycle suivant jusqu’à ce que tous les points de prélèvement soient utilisés.
Fonctionnalités supplémentaires
Re-localiser le bac avec la vision
| Lorsque le Type de port de l’étape Sortie dans Mech-Vision est défini sur Personnalisé, veuillez sélectionner ici le paramètre Mettre à jour la pose du bac via la vision pour mettre à jour les poses du bac ou d’autres objets de la scène. Lorsque le Type de port de l’étape « Sortie » dans Mech-Vision est défini sur Prédéfini (résultat de vision), veuillez sélectionner le paramètre Mettre à jour l’objet de scène dans les paramètres de l’étape « Sortie », et utiliser l’étape Mettre à jour les objets de scène dans Mech-Viz pour mettre à jour les poses des objets de scène. |
Une fois le paramètre Mettre à jour la pose du bac via la vision sélectionné, le bac sera reconnu et localisé simultanément pendant que la caméra capture l’image pour la reconnaissance de l’objet cible. Ainsi, la pose du bac dans la zone de simulation peut être mise à jour dynamiquement, ce qui facilite l’algorithme de détection de collision afin d’empêcher efficacement le robot d’entrer en collision avec le bac.
Cette fonctionnalité fournira trois champs, scene_object_names, scene_object_poses, et scene_object_sizes, dans le résultat de vision pour définir le nom, la pose et les dimensions de l’objet de scène à mettre à jour.
Filtrer le résultat de vision
-
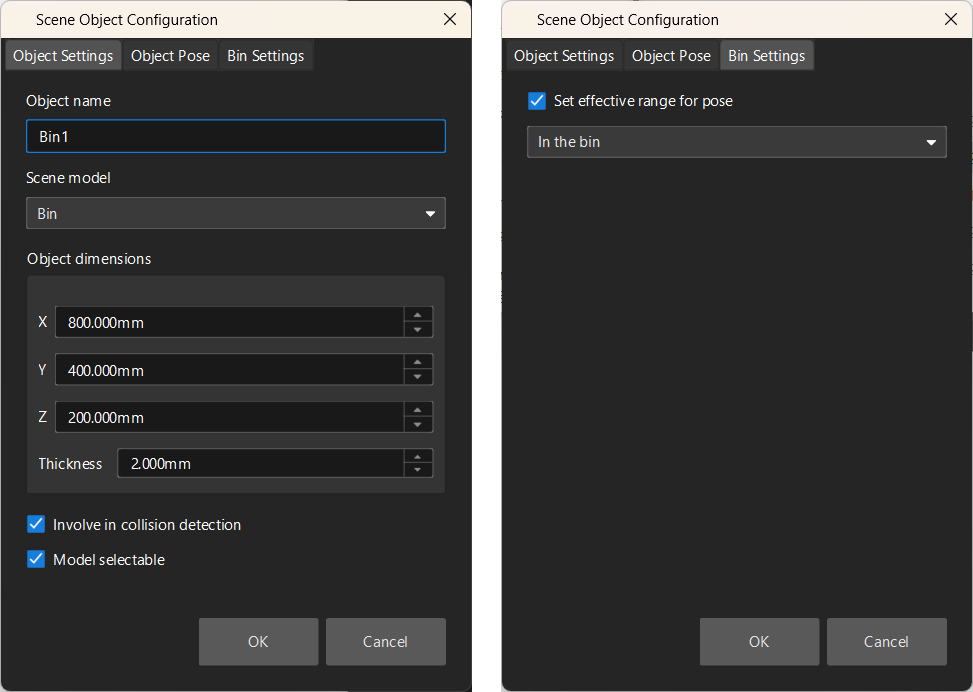
Le résultat doit se trouver dans le bac spécifié
Cette fonctionnalité impose que le résultat de vision reçu par l’étape « Déplacement par vision » actuelle se trouve dans un bac spécifié. Le résultat de vision hors de la plage efficace du bac ne sera pas utilisé.
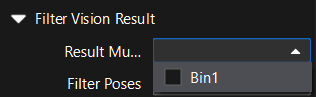
La plage efficace du résultat de vision pour chaque bac peut être configurée séparément dans la fenêtre de configuration correspondante. Seuls les bacs avec « Définir la plage efficace pour la pose » activé peuvent être sélectionnés dans le menu déroulant.
Exemple d’application
Ajoutez « Bin1 », et activez le paramètre « Définir la plage efficace pour la pose » pour ce bac.
Sélectionnez « Bin1 » dans le menu déroulant.
-
Filtrer les poses
Tout utiliser
Ne pas filtrer les poses. Toutes les poses du résultat de vision seront utilisées pour la planification de trajectoire.
Filtrer par nom d’objet cible
Une fois cette option sélectionnée, choisissez l’objet cible configuré dans l’éditeur d’objets cibles dans la liste déroulante du paramètre Utiliser le nom d’objet cible spécifié. Le filtrage des poses basé sur plusieurs noms d’objets cibles est pris en charge.
Filtrer par nom de point de prélèvement
Une fois cette option sélectionnée, choisissez le nom du point de prélèvement dans la liste déroulante du paramètre Utiliser le nom de point de prélèvement spécifié. Le filtrage des poses basé sur plusieurs noms de points de prélèvement est pris en charge.
Filtrer par étiquette de point de prélèvement
Une fois cette option sélectionnée, les poses peuvent être filtrées par les étiquettes de point de prélèvement spécifiées. Après avoir saisi l’étiquette dans le champ de paramètre Utiliser l’étiquette de point de prélèvement spécifiée, seuls les points de prélèvement portant l’étiquette spécifiée seront utilisés pour la planification de trajectoire. Le filtrage des poses basé sur plusieurs étiquettes d’apprentissage profond et des étiquettes numériques définies dans l’éditeur d’objets cibles est pris en charge. Des virgules (,), deux-points (:), ou points-virgules (;) peuvent être utilisés comme séparateurs, sans espaces entre les étiquettes et les séparateurs.
Éviter le prélèvement sur le même objet cible
Ce groupe de paramètres est principalement utilisé pour éviter de prélever sur le même point de prélèvement dans des scénarios où l’objet ne peut pas être prélevé avec succès.
Une fois le paramètre Filtrer les points de prélèvement peu probables sélectionné, vous pouvez ajuster les paramètres suivants.
-
Sujet du filtrage
-
Point de prélèvement : Seuls les points de prélèvement avec des taux d’échec élevés verront leur priorité de prélèvement réduite et seront abandonnés à certains tours.
-
Tous les points de prélèvement sur le même objet cible : si l’un des points de prélèvement sur l’objet cible est considéré comme ayant un taux d’échec élevé, tous les points de prélèvement sur cet objet verront leur priorité de prélèvement réduite et seront abandonnés à certains tours.
-
-
Rayon de baisse de priorité
Une sphère ayant pour rayon la valeur de ce paramètre et pour centre le point de prélèvement planifié avec succès au dernier tour sera introduite. Si un point de prélèvement dans le dernier résultat de vision tombe dans cette sphère, ce point de prélèvement sera reporté avec une priorité de prélèvement diminuée.
-
Rayon d’abandon de tentative
Une sphère ayant pour rayon la valeur de ce paramètre et pour centre le point de prélèvement planifié avec succès au dernier tour sera introduite. Si un point de prélèvement dans le dernier résultat de vision tombe dans cette sphère, le point de prélèvement sera abandonné dans ce tour de planification.
Par exemple, si le robot déplace uniquement le vilebrequin mais n’arrive pas à le prélever à la première tentative, il existe une possibilité de réussite au prélèvement à la tentative suivante. Par conséquent, Rayon de baisse de priorité peut être défini pour diminuer la priorité du point de prélèvement, tandis que le point de prélèvement ne sera pas abandonné. Lorsque le robot n’arrive pas du tout à déplacer le vilebrequin lors de la première tentative, il est très improbable que le vilebrequin puisse être prélevé avec succès à la tentative suivante ; par conséquent, Rayon d’abandon de tentative peut être défini pour abandonner directement la pose.
|
Lorsque Sujet du filtrage est défini sur Point de prélèvement, la longueur maximale de la liste pour les points de prélèvement ayant des taux d’échec de prélèvement élevés est fixée en interne à 100, et aucun paramètre configurable n’est disponible. Si le nombre de points de prélèvement dans un seul résultat de vision est inférieur à 100, la longueur de la liste correspond à ce nombre. Lorsque la longueur de la liste dépasse la limite supérieure, le point de prélèvement ajouté en premier à la liste sera supprimé de la liste et pourra être utilisé au tour de planification suivant. Lorsque Sujet du filtrage est défini sur Tous les points de prélèvement sur le même objet cible, la longueur maximale de la liste pour les objets cibles ayant des taux d’échec de prélèvement élevés est fixée en interne à 100, et aucun paramètre configurable n’est disponible. Si le nombre d’objets cibles dans un seul résultat de vision est inférieur à 100, la longueur de la liste correspond à ce nombre. Lorsque la longueur de la liste dépasse la limite supérieure, l’objet cible ajouté en premier à la liste sera supprimé de la liste et pourra être utilisé au tour de planification suivant. |
Séquence de prélèvement
Stratégie de tri
Ce paramètre est utilisé pour spécifier la stratégie de tri lors du prélèvement des objets cibles.
-
Trier par le nombre d’objets cibles dans la combinaison
Les combinaisons d’objets cibles seront triées en fonction du nombre d’objets cibles qu’elles contiennent, et celles qui en contiennent le plus seront prélevées en premier.
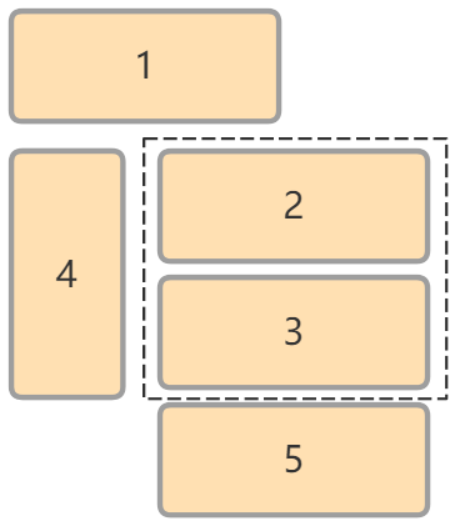
Si trois combinaisons existent, 1-2-3, 4-5 et 6, la séquence de prélèvement sera 1-2-3, 4-5 et 6.
-
Dans l’ordre strict du résultat de vision
Prélever dans l’ordre du résultat envoyé par le service de vision. Si la planification de trajectoire échoue en utilisant un résultat de vision, le résultat en cours ne sera pas ignoré et la planification de trajectoire échouera.
Par exemple, comme illustré dans la figure ci-dessous, la séquence de prélèvement est 1, 2-3, 4 et 5. Si la planification du groupe de boîtes 2-3 échoue, seule la boîte 1 pourra être prélevée avec succès.
-
Dans l’ordre partiel du résultat de vision
Prélever dans l’ordre du résultat envoyé par le service de vision. Si la planification de trajectoire échoue en utilisant un résultat de vision, le résultat en cours sera ignoré. Le résultat de vision suivant sera alors utilisé pour la planification de trajectoire subséquente.
Par exemple, comme illustré dans la figure ci-dessous, la séquence de prélèvement est 1, 2-3, 4 et 5. Si la planification du groupe de boîtes 2-3 échoue, la planification des boîtes 4 et 5 peut se poursuivre.
Regroupement des boîtes
Il existe au total trois stratégies de regroupement, et chaque stratégie comporte des paramètres différents.
Stratégie par défaut
Regrouper les boîtes le long des axes X et Y de la pose de la boîte.
-
Restrictions de regroupement
-
Limite supérieure d’espacement
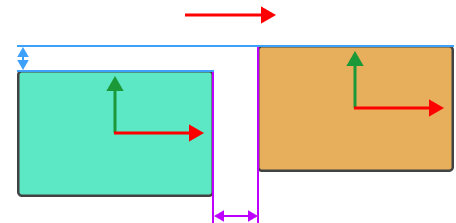
Ce paramètre limite la distance maximale entre deux boîtes adjacentes dans la direction de regroupement. Lorsque la distance est inférieure à cette valeur, les boîtes peuvent être considérées comme appartenant à un groupe.
Veuillez noter que la valeur de ce paramètre ne peut pas être supérieure à la largeur de la boîte dans le résultat de vision. Si la valeur définie est supérieure à la largeur de la boîte, elle sera automatiquement modifiée à la largeur de la boîte lors de l’exécution réelle.
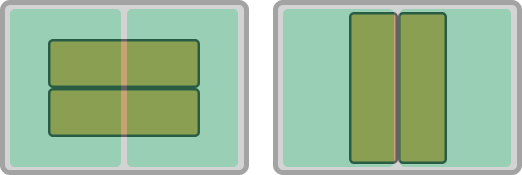
La plage indiquée par la flèche violette ci-dessous correspond à la Limite supérieure d’espacement. Lorsque la distance réelle est inférieure à cette valeur, les boîtes peuvent être considérées comme appartenant au même groupe.
-
Limite supérieure de déviation
Ce paramètre limite la distance maximale de déviation d’une boîte dans la direction perpendiculaire à la direction de regroupement. Lorsque la distance de déviation est inférieure à cette valeur, la boîte peut être considérée comme appartenant au groupe.
Veuillez noter que la valeur de ce paramètre ne peut pas être supérieure à la largeur de la boîte dans le résultat de vision. Si la valeur définie est supérieure à la largeur de la boîte, elle sera automatiquement modifiée à la largeur de la boîte lors de l’exécution réelle.
La plage indiquée par la flèche bleue ci-dessous correspond à la Limite supérieure de déviation. Lorsque la distance réelle est inférieure à cette valeur, la boîte peut être considérée comme appartenant au groupe.
-
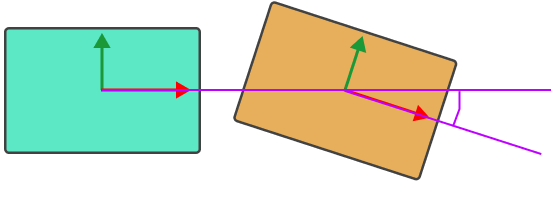
Limite supérieure de déviation angulaire
Ce paramètre limite l’angle de déviation en rotation d’une boîte par rapport à la direction de regroupement. Lorsque l’angle de rotation est inférieur à cette valeur, la boîte peut être considérée comme appartenant au groupe.
-
Limite supérieure du nombre de rangées du groupe
Nombre maximal de rangées autorisé dans un groupe de boîtes pour la dépalettisation multi-prises.
-
Regrouper le long de l’axe du repère de la boîte
Une boîte sera utilisée comme référence, et les autres boîtes adjacentes le long de l’axe X ou Y de la pose de cette boîte seront regroupées.
-
Direction de regroupement
Spécifier l’axe de la pose de référence pour le regroupement des boîtes.
-
Restrictions de regroupement
-
Limite supérieure d’espacement
Ce paramètre limite la distance maximale entre deux boîtes adjacentes dans la direction de regroupement. Lorsque la distance est inférieure à cette valeur, les boîtes peuvent être considérées comme appartenant à un groupe.
Veuillez noter que la valeur de ce paramètre ne peut pas être supérieure à la largeur de la boîte dans le résultat de vision. Si la valeur définie est supérieure à la largeur de la boîte, elle sera automatiquement modifiée à la largeur de la boîte lors de l’exécution réelle.
La plage indiquée par la flèche violette ci-dessous correspond à la Limite supérieure d’espacement. Lorsque la distance réelle est inférieure à cette valeur, les boîtes peuvent être considérées comme appartenant au même groupe.
-
Limite supérieure de déviation
Ce paramètre limite la distance maximale de déviation d’une boîte dans la direction perpendiculaire à la direction de regroupement. Lorsque la distance de déviation est inférieure à cette valeur, la boîte peut être considérée comme appartenant au groupe.
Veuillez noter que la valeur de ce paramètre ne peut pas être supérieure à la largeur de la boîte dans le résultat de vision. Si la valeur définie est supérieure à la largeur de la boîte, elle sera automatiquement modifiée à la largeur de la boîte lors de l’exécution réelle.
La plage indiquée par la flèche bleue ci-dessous correspond à la Limite supérieure de déviation. Lorsque la distance réelle est inférieure à cette valeur, la boîte peut être considérée comme appartenant au groupe.
-
Limite supérieure de déviation angulaire
Ce paramètre limite l’angle de déviation en rotation d’une boîte par rapport à la direction de regroupement. Lorsque l’angle de rotation est inférieur à cette valeur, la boîte peut être considérée comme appartenant au groupe.
-
Limite supérieure du nombre de rangées du groupe
Nombre maximal de rangées autorisé dans un groupe de boîtes pour la dépalettisation multi-prises.
-
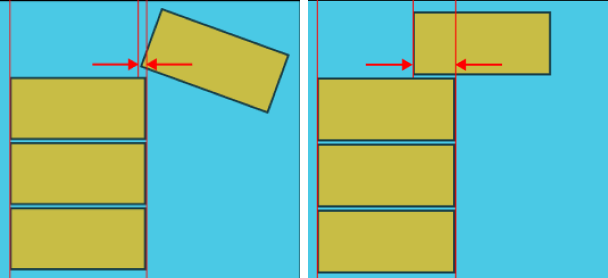
Ne regrouper que les rangées complètes
Dans les applications réelles, une rangée complète de boîtes peut être omise parce qu’il y a des parties d’autres boîtes aux extrémités dans la direction de regroupement. La définition d’une Distance de tolérance aux obstructions peut empêcher la boîte intruse d’influer sur le résultat de regroupement.
-
Distance de tolérance aux obstructions
Pour un groupe de boîtes, si une autre boîte empiète dans la direction perpendiculaire à la direction de regroupement et que la distance d’empiètement est inférieure à ce seuil, la boîte intruse sera ignorée, et le groupe de boîtes sera considéré comme une rangée complète. Sinon, le groupe de boîtes sera écarté.
-
La valeur définie de la Distance de tolérance aux obstructions ne peut pas dépasser la longueur de côté des boîtes.
Regrouper le long de l’axe d’un repère personnalisé
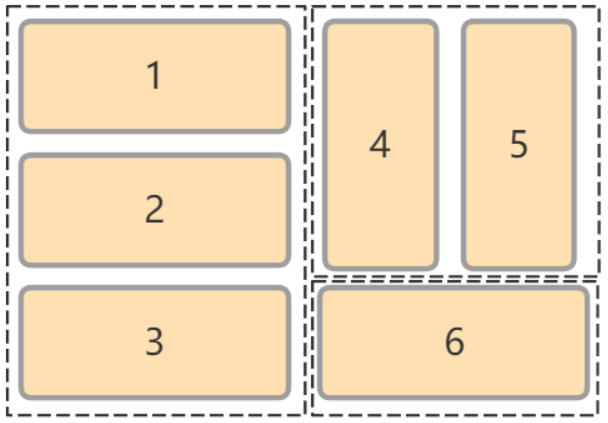
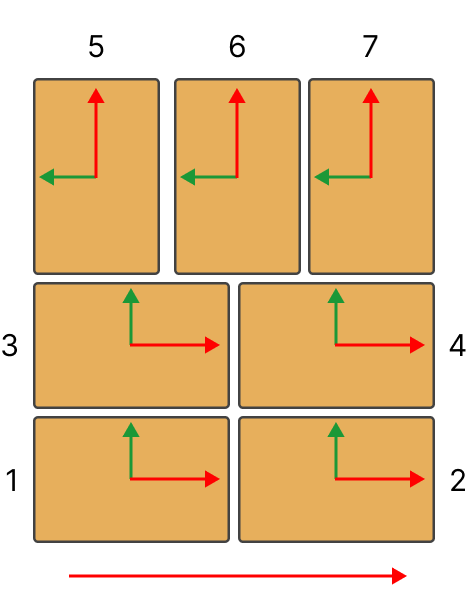
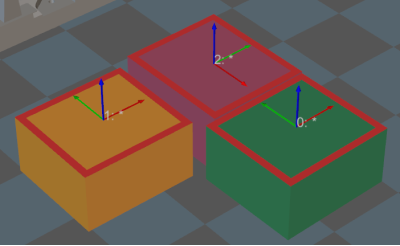
Comme montré dans la figure ci-dessous, si les 7 boîtes sont regroupées le long de l’axe dans le repère de référence de la boîte :
-
Les groupes possibles le long de l’axe X de la boîte sont : 1-2, 3-4, 5, 6, 7.
-
Les groupes possibles le long de l’axe Y de la boîte sont :1-3, 2-4, 5-6-7.
Si vous souhaitez que les boîtes soient regroupées en 1-2, 3-4, 5-6-7, toutes les boîtes doivent être regroupées selon la direction indiquée par la flèche rouge en bas de la figure. La flèche rouge est un axe d’un repère de référence personnalisé.
-
Approche de regroupement
-
Direction de regroupement
Spécifier l’axe de la pose de référence pour le regroupement des boîtes.
-
Coord. X/Y/Z de l’origine du repère personnalisé
Indiquez trois coordonnées pour définir l’origine du repère de référence personnalisé.
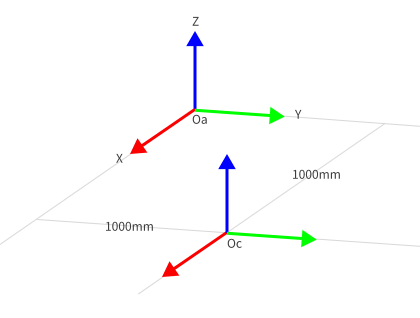
Oa indique le repère de référence du robot, et Oc indique le repère de référence personnalisé.
-
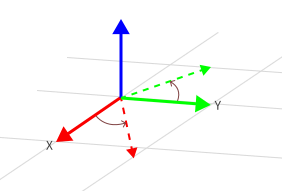
Angle de rotation du repère personnalisé
Spécifiez l’angle de rotation du repère de référence personnalisé autour de son axe Z.
-
-
Restrictions de regroupement
-
Limite supérieure d’espacement
Ce paramètre limite la distance maximale entre deux boîtes adjacentes dans la direction de regroupement. Lorsque la distance est inférieure à cette valeur, les boîtes peuvent être considérées comme appartenant à un groupe.
Veuillez noter que la valeur de ce paramètre ne peut pas être supérieure à la largeur de la boîte dans le résultat de vision. Si la valeur définie est supérieure à la largeur de la boîte, elle sera automatiquement modifiée à la largeur de la boîte lors de l’exécution réelle.
La plage indiquée par la flèche violette ci-dessous correspond à la Limite supérieure d’espacement. Lorsque la distance réelle est inférieure à cette valeur, les boîtes peuvent être considérées comme appartenant au même groupe.
-
Limite supérieure de déviation
Ce paramètre limite la distance maximale de déviation d’une boîte dans la direction perpendiculaire à la direction de regroupement. Lorsque la distance de déviation est inférieure à cette valeur, la boîte peut être considérée comme appartenant au groupe.
Veuillez noter que la valeur de ce paramètre ne peut pas être supérieure à la largeur de la boîte dans le résultat de vision. Si la valeur définie est supérieure à la largeur de la boîte, elle sera automatiquement modifiée à la largeur de la boîte lors de l’exécution réelle.
La plage indiquée par la flèche bleue ci-dessous correspond à la Limite supérieure de déviation. Lorsque la distance réelle est inférieure à cette valeur, la boîte peut être considérée comme appartenant au groupe.
-
Limite supérieure de déviation angulaire
Ce paramètre limite l’angle de déviation en rotation d’une boîte par rapport à la direction de regroupement. Lorsque l’angle de rotation est inférieur à cette valeur, la boîte peut être considérée comme appartenant au groupe.
-
Limite supérieure du nombre de rangées du groupe
Nombre maximal de rangées autorisé dans un groupe de boîtes pour la dépalettisation multi-prises.
-
Ne regrouper que les rangées complètes
Dans les applications réelles, une rangée complète de boîtes peut être omise parce qu’il y a des parties d’autres boîtes aux extrémités dans la direction de regroupement. La définition d’une Distance de tolérance aux obstructions peut empêcher la boîte intruse d’influer sur le résultat de regroupement.
-
Distance de tolérance aux obstructions
Pour un groupe de boîtes, si une autre boîte empiète dans la direction perpendiculaire à la direction de regroupement et que la distance d’empiètement est inférieure à ce seuil, la boîte intruse sera ignorée, et le groupe de boîtes sera considéré comme une rangée complète. Sinon, le groupe de boîtes sera écarté.
-
La valeur définie de la Distance de tolérance aux obstructions ne peut pas dépasser la longueur de côté des boîtes.
-
Seuil d’angle du repère de la boîte
Avant le regroupement des boîtes, l’angle entre le repère de référence de la boîte et le repère personnalisé sera calculé. Si l’angle dépasse ce seuil, la boîte correspondante ne sera pas regroupée.
Décalage du préhenseur à vide
Lors du processus de dépalettisation des boîtes, des préhenseurs à vide fixes et non remplaçables sont généralement utilisés. En raison des différentes dimensions des boîtes, le préhenseur à vide doit manipuler des boîtes de tailles variées. Afin d’éviter de saisir des boîtes non ciblées, le robot peut ne pas prendre la boîte cible avec le centre du préhenseur à vide. À la place, il utilisera un coin ou d’autres parties du préhenseur. En définissant l’approche de décalage et en configurant leOrientation du préhenseur à vide, le problème de saisie de la mauvaise boîte peut être efficacement évité, garantissant une prise stable de boîtes de différentes dimensions.
Il existe au total quatre stratégies de décalage, et chaque stratégie comporte des paramètres différents.
Default strategy
Le logiciel applique séquentiellement trois stratégies—Centre à centre, Milieu de bord à milieu de bord, et Coin à coin—pour tenter le décalage du préhenseur à vide.
Custom strategy priority
Le logiciel respecte les priorités de décalage définies par l’utilisateur pour tenter le décalage du préhenseur à vide.
Il existe au total trois stratégies personnalisées, à savoir Centre à centre, Milieu de bord à milieu de bord, et Coin à coin. Vous pouvez spécifier l’ordre d’essai pour chaque stratégie en configurant le groupe de paramètres Priorité de décalage.
-
Centre à centre : Le centre de la section activée du préhenseur à vide correspond à celui de la boîte.
-
Milieu de bord à milieu de bord : Le milieu du bord de la section activée du préhenseur à vide correspond à celui de la boîte.
-
Coin à coin : Le coin de la section activée du préhenseur à vide correspond à celui de la boîte.
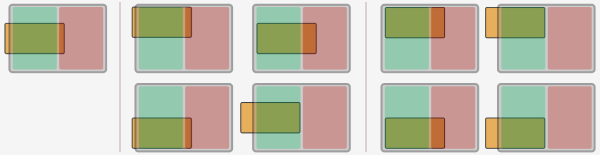
Dans la figure ci-dessous, le rectangle orange représente la boîte, et le rectangle gris représente le préhenseur à vide. La partie verte du préhenseur indique que la section est activée, tandis que la partie rouge indique que la section est désactivée.

-
Lorsqu’une seule section est activée
Les figures ci-dessous montrent, de gauche à droite, les effets de l’utilisation de Centre à centre, Milieu de bord à milieu de bord, et Coin à coin.
-
Lorsque les deux sections sont activées
Les figures ci-dessous montrent, de gauche à droite, les effets de l’utilisation de Centre à centre, Milieu de bord à milieu de bord, et Coin à coin.
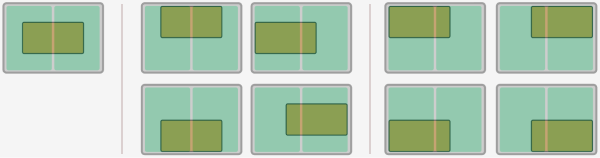
-
L’effet est similaire lorsqu’il y a plus de deux sections activées du préhenseur à vide.
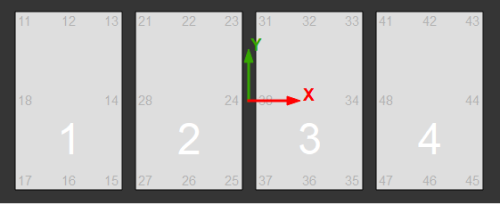
By edge/corner ID sequence
Le logiciel tente le décalage selon la séquence d’ID de bord/coin spécifiée par l’utilisateur (par ex., 11, 21, 31, 41).
Les ID de bord/coin sont générés automatiquement dans le configurateur du préhenseur à vide. Les nombres à deux chiffres au bord de chaque section sont des ID de bord/coin, comme illustré ci-dessous.
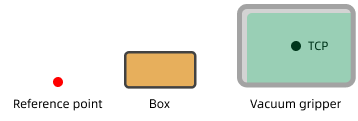
By distance to reference point
Vous devez définir un point de référence pour activer cette fonction. Les stratégies de décalage seront triées selon la distance entre le TCP et le point de référence, et la stratégie de décalage dont le TCP est plus proche du point de référence a une priorité plus élevée.
-
Point de référence X/Y
Spécifiez la position du point de référence. Le point de référence apparaîtra dans la zone de simulation 3D.
-
Conserver uniquement le décalage de haute priorité
Seules les solutions de décalage avec une distance plus courte au point de référence seront conservées.
-
Nombre maximal de résultats de plan
Nombre maximal de solutions de décalage qui seront conservées.
S’il existe au total 4 solutions possibles pour le décalage du préhenseur à vide, et que la valeur de ce paramètre est définie sur 2, les 2 solutions dont les TCP du préhenseur à vide sont plus proches du point de référence seront conservées.
S’il existe au total 2 solutions possibles pour le décalage du préhenseur à vide, et que la valeur de ce paramètre est définie sur 4, seules 2 solutions seront conservées.
-
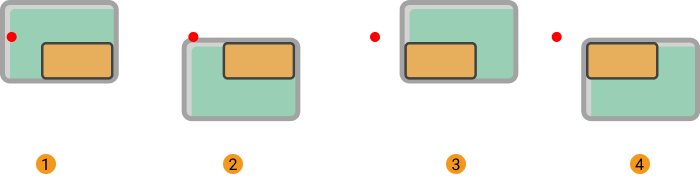
Exemple d’application
Le logiciel tentera les décalages dans l’ordre indiqué ci-dessous.
Box Surface Coverage Lower Limit
Ce paramètre spécifie la proportion minimale de la surface supérieure d’une boîte couverte par le préhenseur à vide lorsque le préhenseur tente de saisir une boîte. Si la couverture est inférieure au seuil, il est considéré que le préhenseur à vide ne peut pas adhérer fermement à la boîte et la saisie n’est pas autorisée.
De plus, lorsque la surface supérieure d’une seule boîte est plus grande que l’ensemble du préhenseur à vide, et que toutes les sections du préhenseur sont activées, la couverture peut atteindre 100 %.
En supposant que ce paramètre soit fixé à 50 %, les faisabilités de saisie sont illustrées ci-dessous.

Vacuum Gripper Orientation
Ce paramètre spécifie l’orientation du préhenseur à vide par rapport au groupe de boîtes pendant la saisie.
-
Libre : L’orientation du préhenseur à vide n’est pas spécifiée.
-
Personnalisé : Vous pouvez définir la direction de l’axe X du préhenseur à vide et la référence d’orientation, et il existe au total quatre relations de position relatives :
-
Les axes X des objets sont parallèles à celui du préhenseur à vide.
-
Les axes X des objets sont perpendiculaires à celui du préhenseur à vide.
-
L’axe X du préhenseur à vide est parallèle à la direction selon laquelle les boîtes sont groupées.
-
L’axe X du préhenseur à vide est perpendiculaire à la direction selon laquelle les boîtes sont groupées.
La figure de gauche montre l’effet lorsque l’axe X du préhenseur à vide est parallèle au bord long du groupe de boîtes, et la figure de droite montre l’effet lorsque l’axe X du préhenseur est perpendiculaire au bord long du groupe de boîtes.
-
Détection de chute de boîte
Dans les projets réels de dépalettisation de boîtes, des points de contrôle DI seront ajoutés à la surface de travail du préhenseur à vide pour surveiller si les boîtes tombent lors de la prise et de la pose, en comparant les variations des signaux des capteurs.
Après l’ajout des points de contrôle DI dans le configurateur du préhenseur à vide, le logiciel déterminera quels capteurs sur la surface de travail du préhenseur sont couverts par les boîtes saisies, et ainsi les signaux DI qui doivent être détectés pourront être confirmés.
Remove Edge DI
Dans le processus réel de dépalettisation, lorsque les capteurs fixés au préhenseur à vide sont proches du bord de la boîte, le logiciel peut détecter à tort que la boîte est tombée en raison d’un grand espace entre les boîtes, d’une aspiration faible au bord, ou pour d’autres raisons.
Pour éviter ces problèmes, vous pouvez sélectionner ce paramètre et définir la distance de suppression du bord de la boîte.
Box Edge Removal Distance
Les capteurs DI qui se trouvent dans la plage de suppression ne seront pas pris en compte dans la détection de chute de boîte.
La largeur du cadre rouge illustrée dans la figure ci-dessous représente la distance de suppression du bord de la boîte. Pour l’application réelle, veuillez ajuster ce paramètre selon les exigences sur site.
Nombre d’objets cibles
Limite d’objets prélevés
Une fois cette option sélectionnée, vous pouvez définir le Nombre maximal d’objets prélevés et d’autres paramètres.
Nombre maximal d’objets prélevés |
Le nombre maximal d’objets cibles autorisés à être prélevés pendant l’exécution du projet. |
Nombre total d’objets prélevés |
Le nombre total d’objets cibles prélevés à ce jour. |
Objets prélevés cette fois |
Le nombre d’objets cibles prélevés cette fois. Lorsque la méthode de prélèvement est définie sur Prélèvement régulier ou Dépalettisation de cartons avec le mode de dépalettisation Un par un, cette valeur est fixée à 1 si le prélèvement se déroule normalement. |
Limite de prélèvements par tentative
Aucune limite |
Il n’y a aucune limite au nombre d’objets cibles pouvant être prélevés à la fois. |
Valeur maximale |
Nombre maximal d’objets cibles pouvant être prélevés à la fois. |
Valeur spécifiée |
Définir une limite fixe sur le nombre d’objets cibles à prélever à la fois. |
Limite de poids de prélèvement
Une fois Limiter le poids de prélèvement sélectionné, vous pouvez spécifier Poids max par objet cible et Poids total max. Par exemple, lorsque Poids max par objet cible est défini à 1 kg, et que Poids total max est défini à 2 kg, jusqu’à 2 boîtes peuvent être prélevées à la fois.
Si le seuil de quantité de boîtes défini par ce groupe de paramètres diffère du seuil défini par Limite de prélèvements par tentative, le seuil inférieur s’appliquera.