Surveillance des données
Le système de vision ne dispose pas d’un mécanisme d’alerte précoce pendant la production réelle, et les problèmes ne sont souvent détectés qu’après la survenue d’un incident majeur, ce qui accroît les risques potentiels.
Afin de résoudre ce problème, cet outil propose une fonction de Surveillance des données. Vous pouvez surveiller la dérive de précision et évaluer l’état de correction de dérive du système de vision pendant le processus de production.
Vérifier les données de correction de dérive
Cliquez sur le bouton Surveillance des données dans le coin supérieur gauche de la page d’accueil pour ouvrir le tableau de bord de surveillance des données et afficher la feuille de données.
Après le déploiement de la solution de correction de dérive, configurez le seuil d’alerte dans le coin supérieur droit du tableau de bord de surveillance des données afin d’assurer un fonctionnement stable sur le long terme en production réelle. En général, le seuil d’alerte peut être fixé à 10 mm. Si le projet exige une haute précision, ajustez la valeur du seuil d’alerte à la baisse en conséquence.
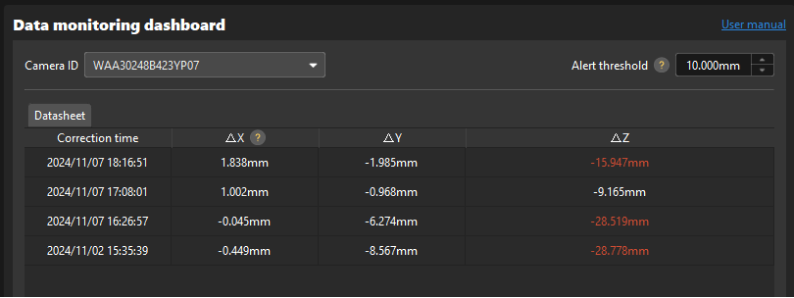
Lorsque la compensation de dérive dans la feuille de données dépasse le seuil d’alerte, les données s’affichent en rouge, indiquant une dérive de précision importante avant correction. Dans ce cas, veuillez vérifier que la caméra et l’outil du robot sont solidement fixés et que la position zéro du robot est exacte.
|
Après avoir terminé le déploiement, vous pouvez vérifier la compensation de dérive dans la zone d’état en haut de l’interface de production. |
|
△X est la compensation de dérive pour la valeur X de la pose de la sphère de calibration. Cette valeur de compensation représente la correction maximale appliquée à la valeur X de la pose de la sphère de calibration parmi toutes les poses collectées depuis les points de capture d’image. Il en va de même pour △Y et △Z. |