Introduction aux modèles de nuages de points et aux points de préhension
Avant d’apprendre à créer un modèle de nuage de points et à ajouter des points de préhension, vous devez comprendre ce qu’est un modèle de nuage de points et ce que sont les points de préhension, ainsi que le rôle qu’ils jouent dans le processus d’appariement.
Qu’est-ce qu’un modèle de nuage de points
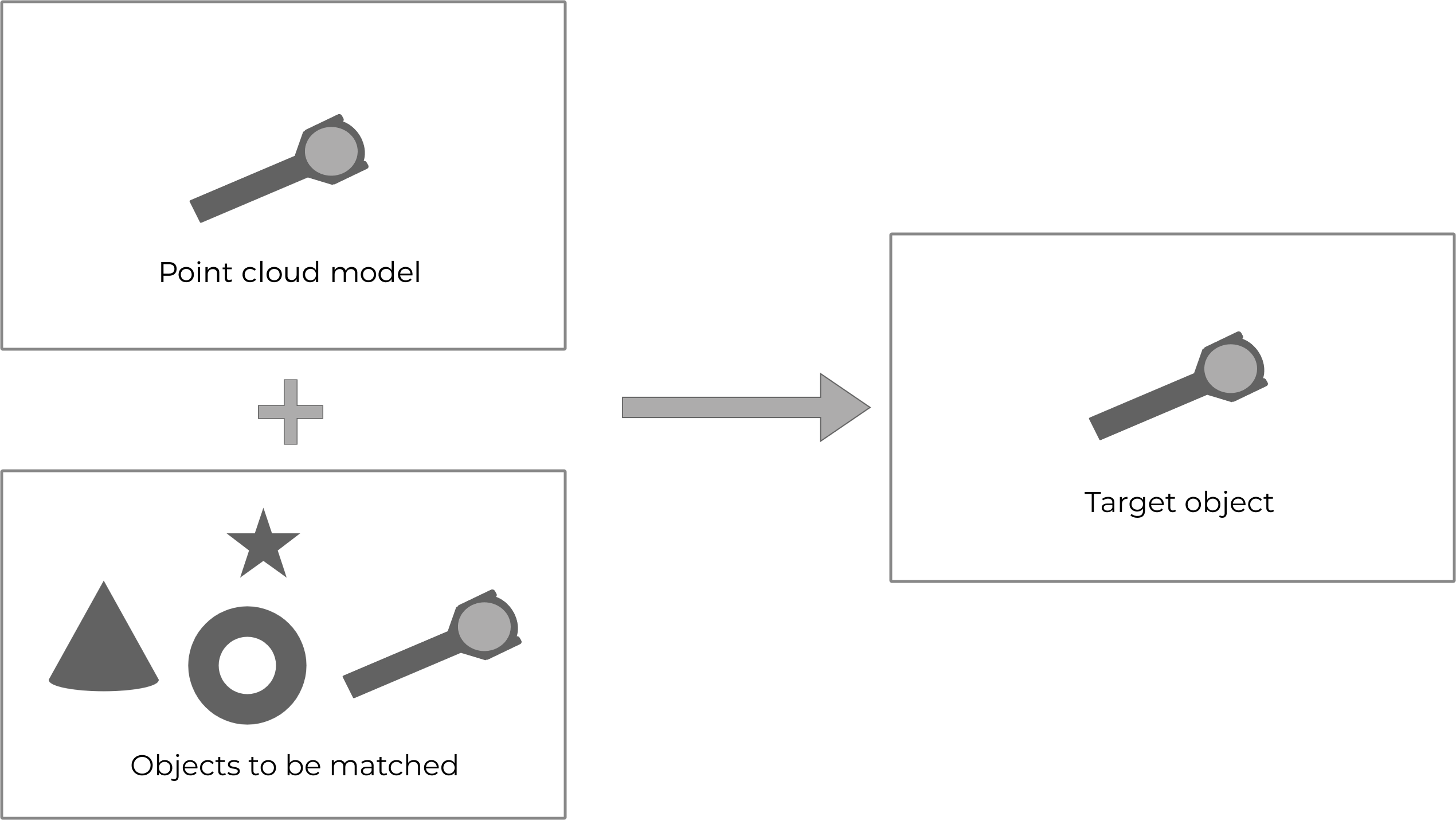
Dans le processus d’appariement, un modèle de nuage de points désigne un nuage de points prédéfini qui reflète la forme, la structure et les caractéristiques de l’objet cible. Il est utilisé pour l’apparier au nuage de points en entrée, trouver la meilleure correspondance et, au final, identifier l’objet cible.
Dans l’illustration ci-dessous, l’objet cible est identifié en faisant correspondre le modèle de nuage de points aux objets à reconnaître.
Un modèle de nuage de points peut représenter l’objet entier ou seulement une partie. Pour garantir un appariement efficace, le nuage de points doit satisfaire aux exigences suivantes :
-
Le modèle de nuage de points doit comporter un nombre suffisant de points, répartis de manière homogène afin de garantir la vitesse d’appariement.
-
Le modèle de nuage de points doit refléter les caractéristiques typiques de l’objet cible afin d’assurer une reconnaissance précise lors de l’appariement.
-
Le modèle de nuage de points ne doit pas contenir de nuages de points parasites afin d’assurer la stabilité et la précision de l’appariement.
Qu’est-ce qu’un point de préhension
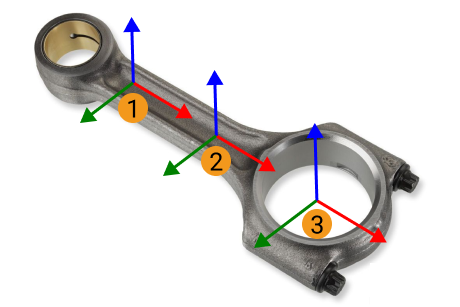
Un point de préhension est la position sur l’objet que le robot peut saisir. Le point de préhension est défini dans le repère de l’objet. Sa position et son orientation sont relatives à l’objet cible.
Un objet cible peut comporter plusieurs points de préhension situés à l’intérieur, sur la surface ou à proximité du nuage de points de l’objet cible, comme illustré ci-dessous.