Définir les paramètres d’étape
Configuration globale
Planifier tous les résultats de vision
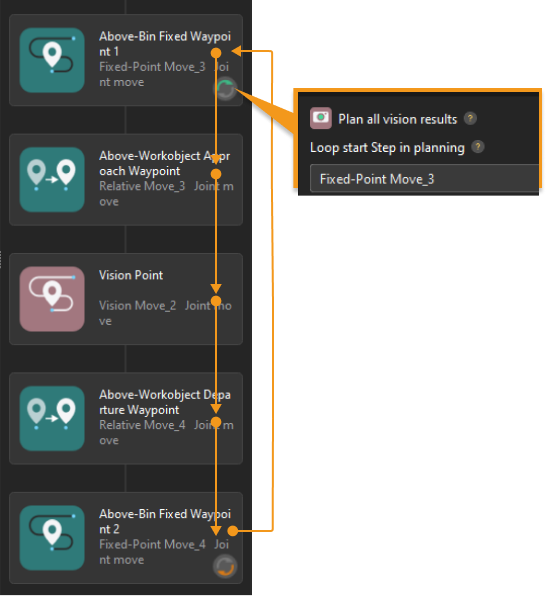
Une fois cette option activée, le flux de travail actuel sera bouclé jusqu’à ce que tous les résultats de vision reçus soient utilisés pour la planification de trajectoire, puis toutes les trajectoires de prélèvement pourront être sorties après l’achèvement de la planification. Vous devez définir une Étape de début de boucle dans la planification si cette option est activée.
| La « planification » désigne le processus par lequel le logiciel tente de trouver une trajectoire sans collision que le robot peut suivre pour atteindre la position cible. |
L’Étape de début de boucle dans la planification est l’étape où la boucle commence dans la planification. Par exemple, « Déplacement à point fixe_3 » est définie comme Étape de début de boucle dans la planification dans la figure ci-dessous, et le logiciel bouclera le flux de travail actuel jusqu’à ce que tous les résultats de vision reçus soient utilisés pour la planification de trajectoire.
Éviter de prélever sur le même objet cible
Cette option sert à éviter de tenter de nouveau sur le même point de prélèvement après l’échec d’une tentative.
Dépalettisation de cartons
Une fois cette fonction activée, le logiciel entrera en mode dépalettisation dans lequel l’outil terminal doit être réglé sur le préhenseur à vide de dépalettisation. Veuillez sélectionner la méthode de dépalettisation en fonction des exigences du scénario réel.
| Une fois la fonction de dépalettisation de cartons activée, le nuage de points du carton cible sera supprimé par défaut, avec une extension de la plage de suppression du nuage de points en direction XY de 10 mm et une extension de la plage de suppression du nuage de points en direction Z de 30 mm. Pour une présentation détaillée de cette fonction, veuillez vous référer à Supprimer le nuage de points de l’objet cible. |
Dépalettisation à prise unique
« Dépalettisation à prise unique » indique qu’un seul carton sera prélevé à la fois lors de la dépalettisation.
Veuillez suivre ces étapes pour configurer :
-
Accédez à l’arbre des ressources du projet et cliquez sur + à droite de Outils pour ouvrir la fenêtre Configuration de l’outil.
Dans cette fenêtre :
-
Sélectionnez Préhenseur à vide de dépalettisation comme Type d’outil.
-
Cliquez sur le bouton Configurer le préhenseur à vide de dépalettisation en bas pour ouvrir le configurateur de préhenseur à vide. Vous pouvez vous référer à Configuration de la pince à vide de dépalletisation pour compléter les configurations.
-
-
Activez Dépalettisation de cartons dans la configuration globale.
-
Sélectionnez Prise unique.
-
Définissez le paramètre Couverture minimale de la surface du carton selon la situation réelle.
Ce paramètre spécifie la proportion minimale de la surface supérieure d’un carton couverte par le préhenseur à vide lorsque celui-ci tente de prélever un carton. Si la couverture est supérieure à la valeur, il est considéré que le préhenseur à vide est capable de prélever le carton.
Prise multiple
« Prise multiple » indique que les cartons seront automatiquement regroupés pour la dépalettisation, et qu’un groupe de cartons contenant plusieurs cartons sera prélevé en une seule fois.
Veuillez suivre ces étapes pour configurer :
-
Cliquez sur le signe plus à côté de « Outils » dans l’arbre des ressources pour ouvrir la fenêtre Configuration de l’outil.
-
Sélectionnez Préhenseur à vide de dépalettisation comme Type d’outil.
-
Cliquez sur le bouton Configurer le préhenseur à vide de dépalettisation en bas pour ouvrir le configurateur de préhenseur à vide. Vous pouvez vous référer à Configuration de la pince à vide de dépalletisation pour compléter les configurations.
-
-
Activez Dépalettisation de cartons dans la configuration globale.
-
Sélectionnez Dépalettisation à prise multiple.
-
Vous pouvez définir les paramètres suivants selon les exigences réelles.
-
Couverture minimale de la surface du carton
Ce paramètre spécifie la proportion minimale de la surface supérieure d’un carton couverte par le préhenseur à vide lorsque celui-ci tente de prélever un carton. Si la couverture est supérieure à la valeur, il est considéré que le préhenseur à vide est capable de prélever le carton.
-
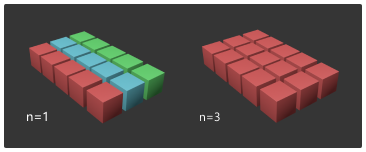
Nombre maximal de rangées par groupe
Le nombre maximal de rangées autorisé dans un groupe de cartons pour la dépalettisation à prise multiple.
-
Limite supérieure d’espacement
Ce paramètre limite la distance maximale entre deux cartons adjacents dans la direction de regroupement. Lorsque la distance est inférieure à cette valeur, les cartons peuvent être considérés comme appartenant à un groupe.
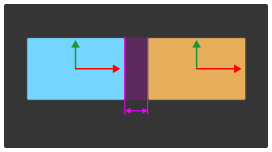
Veuillez noter que la valeur de ce paramètre ne peut pas être supérieure à la largeur du carton dans le résultat de vision. Si la valeur définie est supérieure à la largeur du carton, la valeur sera automatiquement modifiée à la largeur du carton lors de l’exécution réelle. -
Limite supérieure de déviation
Ce paramètre limite la distance maximale de déviation d’un carton dans la direction perpendiculaire à la direction de regroupement. Lorsque la distance de déviation est inférieure à cette valeur, le carton peut être considéré comme appartenant au groupe.
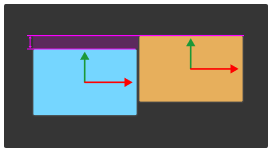
Veuillez noter que la valeur de ce paramètre ne peut pas être supérieure à la largeur du carton dans le résultat de vision. Si la valeur définie est supérieure à la largeur du carton, la valeur sera automatiquement modifiée à la largeur du carton lors de l’exécution réelle. -
Limite supérieure de déviation angulaire
Ce paramètre limite l’angle de déviation de rotation d’un carton par rapport à la direction de regroupement. Lorsque l’angle de rotation est inférieur à cette valeur, le carton peut être considéré comme appartenant au groupe.
-
Déplacement à point fixe
Cette étape spécifie une pose fixe comme point de passage.
Description des paramètres
-
Envoyer au robot ou non
Description: Déterminer s’il faut envoyer la pose de cette étape au robot.
Exemple: Si Planifier et ne pas envoyer est sélectionné, l’étape Planification de trajectoire ne sortira pas la pose de cette étape.
-
Type de mouvement
Description: Le type de mouvement par lequel le robot se déplace vers la pose correspondante dans cette étape. Le mouvement linéaire est généralement utilisé dans des scénarios de collage.
Exemple: Si le mouvement articulaire est sélectionné, le robot se déplacera vers la pose correspondante dans cette étape avec un mouvement articulaire.
-
Type de pose du robot
Description: Sélectionnez la méthode pour ajuster la pose.
Vous pouvez ajuster la pose du robot de l’une des trois manières suivantes.
-
Ajustez les JPs du robot.
-
Faites glisser le manipulateur de pose dans la zone de simulation 3D.
-
Saisissez la pose du robot réel.
-
Déplacez le robot avec le boîtier d’apprentissage et enregistrez le TCP ou les positions articulaires.
-
Cliquez sur Modifier la pose (si la pose du robot est sous forme de TCP) ou Modifier les JPs (si la pose du robot est sous forme de Positions articulaires) dans le panneau Robot.
-
Entrez le TCP ou les JPs enregistrés et cliquez sur OK. Ensuite, le robot simulé se déplacera vers la pose correspondante.
-
Déplacement relatif
Cette étape spécifie la distance que le robot parcourt le long de l’axe Z par rapport au point de passage précédent ou suivant.
Description des paramètres
-
Envoyer au robot ou non
Description: Déterminer s’il faut envoyer la pose de cette étape au robot.
Exemple: Si Planifier et ne pas envoyer est sélectionné, l’étape Planification de trajectoire ne sortira pas la pose de cette étape.
-
Type de mouvement
Description: Le type de mouvement par lequel le robot se déplace vers la pose correspondante dans cette étape. Le mouvement linéaire est généralement utilisé dans des scénarios de collage.
Exemple: Si le mouvement articulaire est sélectionné, le robot se déplacera vers la pose correspondante dans cette étape avec un mouvement articulaire.
-
Se déplacer par rapport à
Description: La pose de référence lorsque le robot se déplace.
Exemple: Si Point de passage précédent est sélectionné, le robot se déplacera en se basant sur le point de passage précédent.
-
Direction
Description: La direction le long de laquelle le robot se déplace.
Exemple: Si Le long de l’axe Z du repère de l’objet cible est sélectionné, le robot se déplacera le long de l’axe Z du repère de l’objet cible.
-
Distance
Description: La distance que le robot parcourt le long de la direction de mouvement.
Déplacement basé sur la vision
Cette étape est utilisée pour prélever l’objet cible. Les points de vision fournis à l’étape de planification de trajectoire seront utilisés dans cette étape.
Description des paramètres
-
Envoyer au robot ou non
Description: Déterminer s’il faut envoyer la pose de cette étape au robot.
Exemple: Si Planifier et ne pas envoyer est sélectionné, l’étape Planification de trajectoire ne sortira pas la pose de cette étape.
-
Type de mouvement
Description: Le type de mouvement par lequel le robot se déplace vers la pose correspondante dans cette étape.
Exemple: Si le mouvement articulaire est sélectionné, le robot se déplacera vers la pose correspondante dans cette étape avec un mouvement articulaire.