De Shape2DList à Pose2DList
Fonction
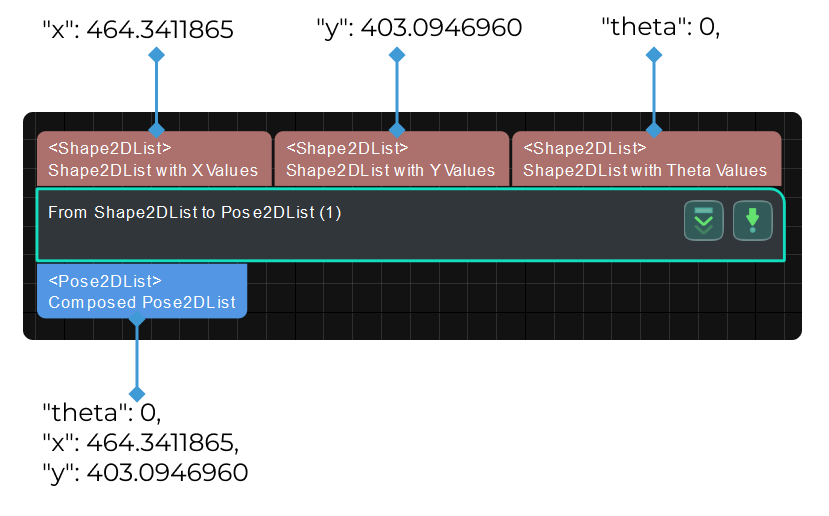
Cette étape sert à composer une nouvelle liste de poses 2D en prenant respectivement, à partir des trois listes d’informations de forme 2D en entrée, les listes des valeurs X, des valeurs Y et des valeurs Theta (Theta représente l’angle d’inclinaison).
Scénario d’utilisation
Cette étape est généralement précédée par l’étape Détecter et mesurer une ligne (pour obtenir l’angle d’inclinaison de la ligne, Theta) et l’étape Détecter et mesurer un cercle (pour obtenir les coordonnées X et Y du centre du cercle) afin de produire des poses 2D plus précises des objets dans l’image, puis suivie de l’étape Enregistrer la pose de référence et calculer la transformation pour aligner avec précision un groupe d’objets dans l’image.
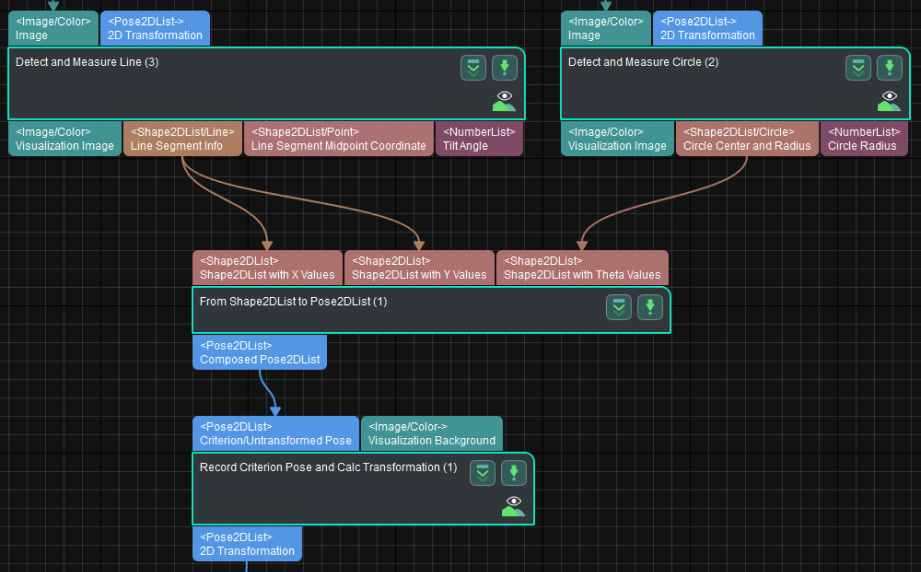
La combinaison d’étapes ci-dessus est généralement appliquée après l’étape Appariement de gabarit pour rendre les résultats de l’étape d’appariement de gabarit plus précis. Si les objets dans chaque image sont déjà presque alignés, l’étape d’appariement de gabarit n’est plus nécessaire.