Orienter les axes des poses vers une direction donnée
Scénario d’utilisation
Pour divers scénarios où l’orientation des poses doit être ajustée.
Cette étape est obsolète. Si vous devez faire pivoter des poses en fonction de la symétrie de l’objet (c’est-à-dire régler le paramètre Rectification Method de cette étape sur ROTATION), veuillez utiliser la nouvelle étape Orienter les axes des poses vers des directions spécifiées sous contraintes de symétrie ainsi que l’étape Création facile de Vector3Ds.
Description des paramètres
Paramètres de visualisation
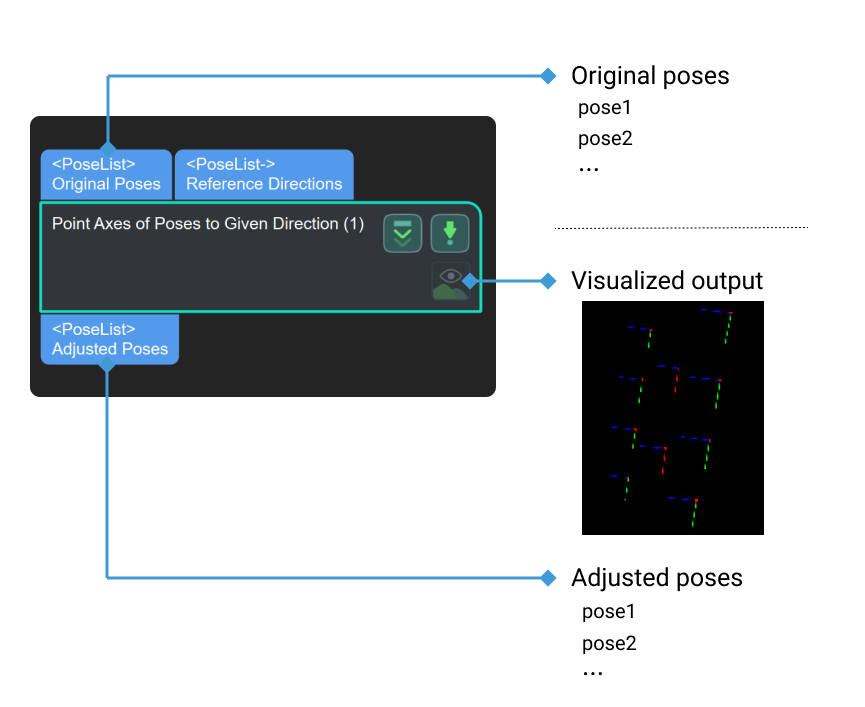
- Type de pose à visualiser
-
Paramètre par défaut : Après.
Liste des options : Après, Avant et Tout.
Instruction : Ce paramètre détermine le type de pose à visualiser, y compris la pose après traitement, la pose avant traitement, et les poses avant et après traitement.
Sélection de la méthode
- Méthode de rectification
-
-
HARD_RECTIFY: La valeur par défaut. S’il existe une deuxième entrée (pose de référence) et que useFirstRefPose est sélectionné, la direction de référence est la direction du type d’axe correspondant de la première pose de référence. Sinon, la direction de référence sera le type d’axe correspondant de toutes les poses de référence. S’il n’y a pas de deuxième entrée (pose de référence), « reference Dir » déterminera la direction de référence.
-
ROTATION: Définir l’angle de symétrie en fonction de la symétrie de l’objet, de sorte que l’axe de rotation à ajuster soit approximativement dans la même direction que l’axe de référence spécifié.
Lorsque cette méthode est sélectionnée, cette étape peut uniquement faire pivoter les axes X et Y de la pose autour de l’axe Z, et ne peut pas faire pivoter l’axe Z de la pose.
-
Paramètres des axes
- Axe à orienter
-
Instruction : l’axe de rotation à ajuster.
Liste des options : X, Y et Z (paramètre par défaut).
Direction de référence
- Axe X
-
Valeur par défaut : 0.0000
Instruction : le vecteur directionnel de l’axe de référence X.
- Axe Y
-
Valeur par défaut : 0.0000
Instruction : le vecteur directionnel de l’axe de référence Y.
- Axe Z
-
Valeur par défaut : 1.0000
Instruction : le vecteur directionnel de l’axe de référence Z.
- Angle de symétrie
-
Description du paramètre : Ce paramètre est utilisé pour définir l’angle de symétrie des objets symétriques (lorsque ROTATION est sélectionné dans la méthode de rectification, ce paramètre doit être défini).
Valeur par défaut : 120°
Recommandation d’ajustement : Veuillez définir le paramètre selon les besoins réels.