Sélection des sphères de calibration
Dans ce sujet, nous expliquerons comment déterminer le nombre et le diamètre des sphères de calibration en fonction de la caméra utilisée avant de déployer la solution de correction de dérive de précision du système de vision.
Après avoir déterminé le diamètre de la sphère de calibration, vous pouvez vous référer à Guide d’utilisation des sphères de calibration pour des conseils d’utilisation et des informations de maintenance.
|
De manière générale, la solution d’auto-correction de la dérive de précision du système de vision peut être déployée quel que soit le modèle de caméra utilisé dans le système de vision. Si la distance de travail de la caméra est comprise entre 500 mm et 3000 mm, une sphère de calibration de 60 mm de diamètre peut être utilisée directement. Si la distance de travail de la caméra est en dehors de la plage 500–3000 mm, veuillez contacter le support technique pour évaluer l’utilisation de sphères de calibration d’autres spécifications. |
Correction automatique de la dérive de précision dans le système de vision EIH
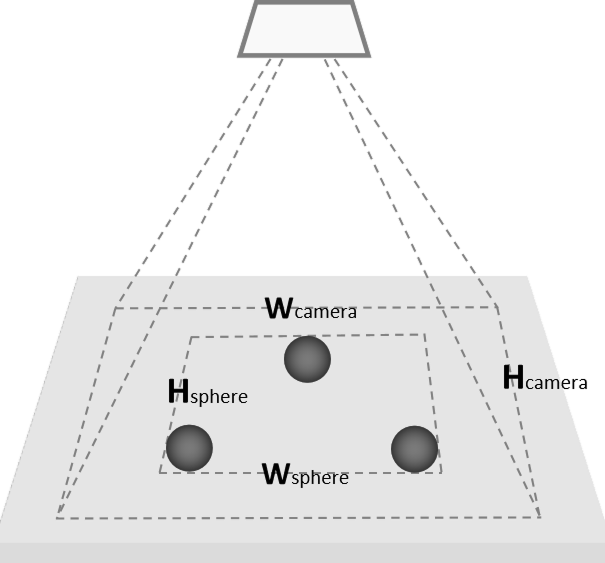
Avant de déployer la solution, préparez 3 sphères de calibration. Le tableau ci-dessous montre comment déterminer le diamètre de la sphère de calibration correspondant et les dimensions du rectangle englobant de la sphère en fonction du modèle de caméra et du champ de vision.
| Modèle de caméra | Champ de vision de la caméra (mm) | Diamètre de la sphère de calibration (mm) | Dimensions du rectangle englobant de la sphère de calibration Wsphere × Hsphere (mm) |
|---|---|---|---|
UHP-140-GL |
FOV proche 135 × 90 @ 0.28 m |
25.4 |
94 × 62 @ 0.28m |
FOV éloigné 150 × 100 @ 0.32 m |
25.4 |
105 × 70 @ 0.32 m |
|
NANO-GL |
FOV proche 220 × 150 @ 0.3 m |
25.4 |
154 × 105 @ 0.3 m |
FOV éloigné 440 × 300 @ 0.6 m |
60 |
308 × 210 @ 0.6 m |
|
NANO ULTRA-GL |
FOV proche 220 × 165 @ 0.25 m |
25.4 |
154 × 115 @ 0.25 m |
FOV éloigné 500 × 340 @ 0.5 m |
60 |
300 × 204 @ 0.5 m |
|
PRO S-GL |
FOV proche 370 × 240 @ 0.5 m |
60 |
222 × 144 @ 0.5 m |
FOV éloigné 800 × 450 @ 1.0 m |
60 |
480 × 270 @ 1.0 m |
|
PRO M-GL |
FOV proche 800 × 450 @ 1.0 m |
60 |
480 × 270 @ 1.0 m |
FOV éloigné 1500 × 890 @ 2.0 m |
60 |
900 × 534 @ 2.0 m |
|
LSR S-GL |
FOV proche 480 × 360 @ 0.5 m |
60 |
288 × 216 @ 0.5 m |
FOV éloigné 1500 × 1200 @ 1.5 m |
60 |
900 × 720 @ 1.5 m |
|
Pour le rapport entre la longueur du côté du rectangle englobant de la sphère de calibration et la longueur du côté du champ de vision de la caméra, vous pouvez vous référer aux informations suivantes:
|
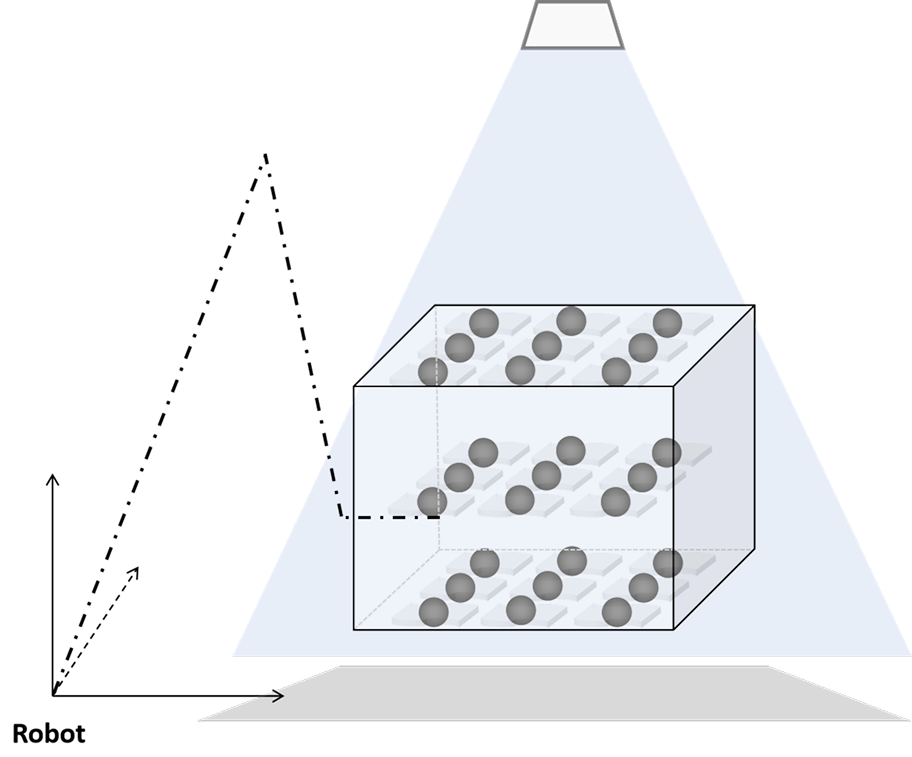
Correction automatique de la dérive de précision dans le système de vision ETH
Avant de déployer la solution, préparez 1 sphère de calibration. Le tableau ci-dessous montre comment déterminer le diamètre de la sphère de calibration correspondant et sa plage de mouvement en fonction du modèle de caméra et du champ de vision.
| Modèle de caméra | Champ de vision de la caméra (mm) | Diamètre de la sphère de calibration (mm) | Plage de mouvement lorsqu’elle est portée par le robot |
|---|---|---|---|
LSR S-GL |
FOV proche 480 × 360 @ 0.5 m |
60 |
L’ensemble de l’espace du bac |
FOV éloigné 1500 × 1200 @ 1.5 m |
60 |
L’ensemble de l’espace du bac |
|
LSR L-GL |
FOV proche 1200 × 1000 @ 1.2 m |
60 |
L’ensemble de l’espace du bac |
FOV éloigné 3000 × 2400 @ 3.0 m |
100 |
L’ensemble de l’espace du bac |
|
LSR XL-GL |
FOV proche 1280 × 1280 @ 1.6 m |
60 |
L’ensemble de l’espace du bac |
FOV éloigné 3000 × 2800 @ 3.5 m |
100 |
L’ensemble de l’espace du bac |
|
DEEP-GL |
FOV proche 1200 × 1000 @ 1.2 m |
60 |
L’ensemble de l’espace du bac |
FOV éloigné 3500 × 2800 @ 3.5 m |
100 |
L’ensemble de l’espace du bac |