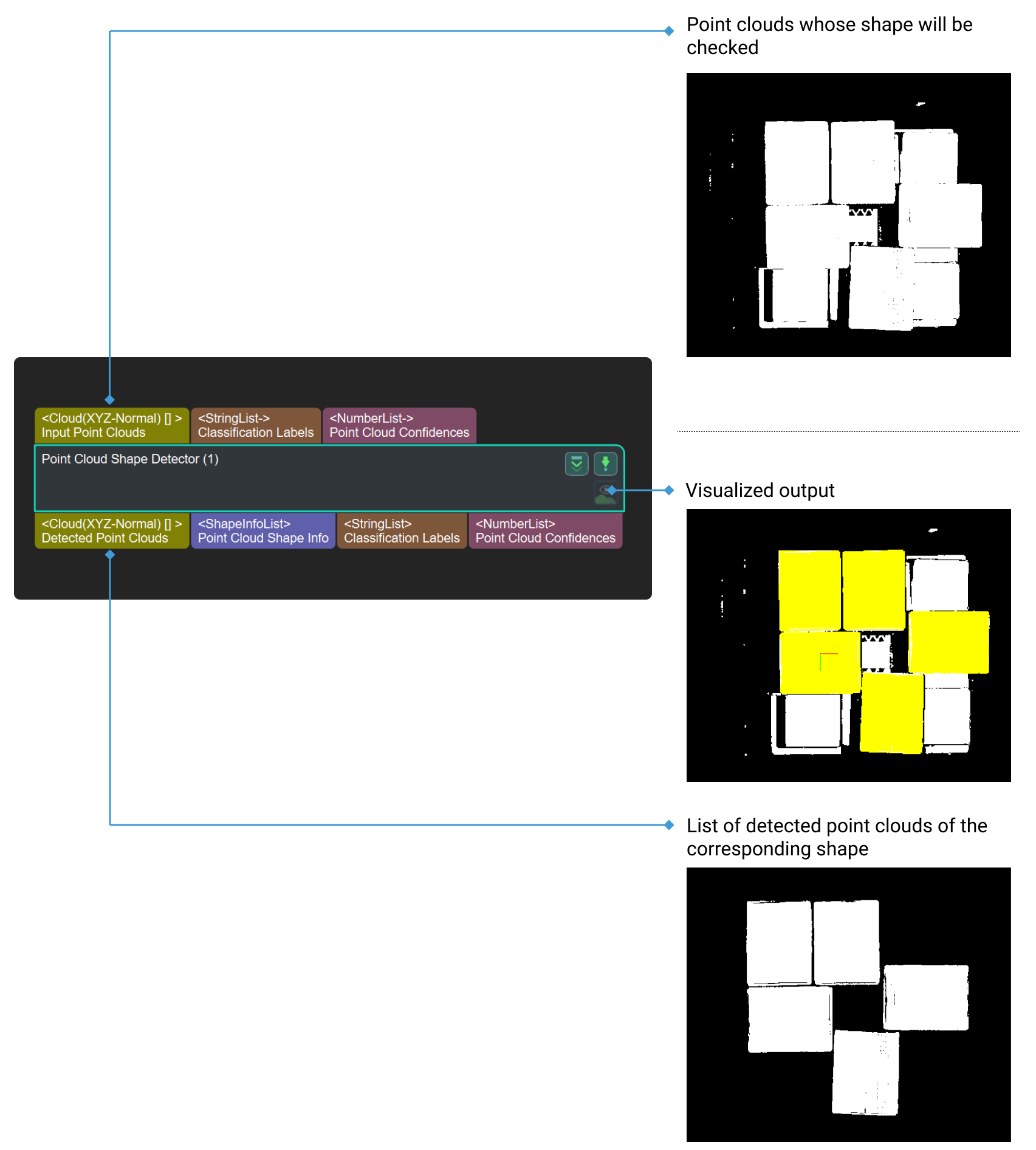
Détecteur de forme de nuage de points
Fonction
Cette Étape détecte et produit des nuages de points de forme plane ou cylindrique; la forme peut être sélectionnée dans le paramètre.
Scénario d’utilisation
Cette Étape est généralement utilisée pour détecter des objets aux formes planes et cylindriques.
Si vous devez calculer les points de prise des nuages de points cylindriques, cette Étape peut être suivie de l’Étape Calcul des poses de cylindres.
Description des paramètres
Formes à détecter
Instruction: Ce paramètre permet de choisir le type de forme cible, y compris plan, cylindre et sphère.
Paramètre par défaut: Plan.
Paramètre suggéré: Définir selon les scénarios réels.
Paramètres de détection
- Détecteur
-
Instruction: Ce paramètre permet de choisir le type de détecteur utilisé pendant la détection, y compris Méthode 1 et Méthode 2. (Après optimisation, il ne restera que la Méthode 1.)
Paramètre par défaut: Méthode 1
Paramètre suggéré: Méthode 2
- Écart de normale
-
Instruction: Ce paramètre sert à définir la limite supérieure de la différence d’angle (en °) entre la normale du point dans l’image et la normale de la forme standard théorique correspondante projetée.
Valeur par défaut: 30°
Valeur suggérée: Définir selon les scénarios réels.
- Fluctuation acceptable du nuage de points
-
Instruction: Ce paramètre est la limite supérieure (en mm) de la plage acceptable de l’erreur de fluctuation du nuage de points.
Valeur par défaut: 5.000 mm
Valeur suggérée: [3.000, 5.000].
- Intervalle minimal de regroupement
-
Instruction: Ce paramètre est la limite inférieure (en mm) de l’intervalle pour le jugement de connectivité du nuage de points. Lorsque ce paramètre devient grand, des points éloignés les uns des autres seront regroupés en une seule classe; lorsqu’il devient plus petit, cependant, des points proches les uns des autres seront regroupés en différentes classes.
Valeur par défaut: 5.000 mm
Valeur suggérée: Définir selon les scénarios réels.
- Résolution de quantification du nuage de points
-
Instruction: Ce paramètre sert à contrôler le nombre et la densité des points. L’unité est le millimètre. Un nombre et une densité plus élevés correspondent à une précision plus grande et à un temps de calcul plus long; lorsque ce paramètre est fixé plus bas, le nuage de points devient plus clairsemé, ce qui peut diminuer la précision du calcul mais économiser du temps de calcul.
Valeur par défaut: 5.000 mm
Valeur suggérée: Généralement le double de la valeur de « Intervalle minimal de regroupement ».
- Nombre de résultats par nuage de points
-
Instruction: Ce paramètre détermine le nombre de résultats finaux produits pour chaque nuage de points.
Valeur par défaut: 1
Valeur suggérée: Définir selon les scénarios réels.
- Trier par nombre de points
-
Instruction: Ce paramètre décide s’il faut trier le résultat final selon la taille du nuage de points ou non.
Paramètre par défaut: sélectionné.
Valeur suggérée: Définir selon les scénarios réels.
- Probabilité de succès (0–1.0)
-
Instruction: Ce paramètre sert à ajuster le taux de réussite de la détection, afin de garantir un taux suffisant pour détecter la forme correspondante.
Valeur par défaut: 0.9900
Valeur suggérée: Définir selon les scénarios réels.
Filtre des candidats
- Proportion minimale du nombre de points de la forme (0–1.0)
-
Instruction: Ce paramètre sert à définir la limite inférieure de la proportion entre les points détectés appartenant à une forme et le nombre total de points avec des étiquettes de forme. Les points qui ont des étiquettes de forme et sont en dessous de cette limite seront filtrés.
Valeur par défaut: 0.1000
Valeur suggérée: Définir selon les scénarios réels.
- Erreur moyenne de distance minimale (0–1.0)
-
Instruction: Ce paramètre sert à définir la limite inférieure de l’écart de distance moyen(en mm) entre les points réels et les points de la forme théorique correspondante détectée. Lorsque ce paramètre devient plus grand, des nuages de points avec de grands écarts seront conservés; lorsqu’il devient plus petit, cependant, des nuages de points avec de petits écarts seront filtrés.
Valeur par défaut: 10.000 mm
Valeur suggérée: Définir selon les scénarios réels.
- Erreur moyenne d’angle minimale (0–90)
-
Instruction: Ce paramètre sert à définir la limite inférieure de l’écart angulaire moyen (en °) entre les points réels et les points de la forme théorique correspondante détectée. Lorsque ce paramètre devient plus grand, des nuages de points avec de grands écarts seront conservés; lorsqu’il devient plus petit, cependant, des nuages de points avec de petits écarts seront filtrés.
Valeur par défaut: 45.0000
Valeur suggérée: Définir selon les scénarios réels.
Propriété du cylindre
- Rayon minimal
-
Instruction: Ce paramètre permet de définir la limite inférieure du cylindre (en mm). Les cylindres avec un rayon inférieur à cette limite seront filtrés.
Valeur par défaut: 10.000 mm
Valeur suggérée: Définir selon les scénarios réels.
- Rayon maximal
-
Instruction: Ce paramètre permet de définir la limite supérieure du cylindre (en mm). Les cylindres avec un rayon supérieur à cette limite seront filtrés.
Valeur par défaut: 100.000 mm
Valeur suggérée: Définir selon les scénarios réels.
- Optimiser les positions du cylindre
-
Instruction: Ce paramètre décide s’il faut optimiser les paramètres de forme du cylindre, y compris le point central et l’axe.
Valeur par défaut: Non sélectionné.
Paramètre suggéré: Sélectionné.