FAQ et dépannage
FAQ
Comment effectuer la calibration sur un robot à 7 axes ?
|
Les robots à 7 axes mentionnés ici n’incluent pas les robots à 6 axes équipés d’un rail coulissant. |
Pour les robots ABB, FANUC, KUKA et YASKAWA à 7 axes, la calibration automatique peut être effectuée via la communication Standard Interface après découplage du septième axe.
Pour les autres robots à 7 axes, vous pouvez utiliser la méthode de calibration manuelle. Le contact avec la pointe TCP est recommandé pour la calibration.
S’il n’y a pas de pointe aiguë disponible sur site ou si la pointe ne peut pas être montée, la méthode des poses aléatoires multiples de la mire de calibration peut être utilisée. Pendant le processus de calibration, vous devez restreindre le mouvement de l’un des axes et idéaliser le robot à 7 axes en robot à 6 axes. Le reste des opérations est globalement identique à la calibration sur un robot à 6 axes.
|
Avant la calibration main-œil pour les robots à 7 axes, veuillez vérifier la précision absolue du robot. |
Comment calibrer lorsque la convention des angles d’Euler du robot est incertaine ?
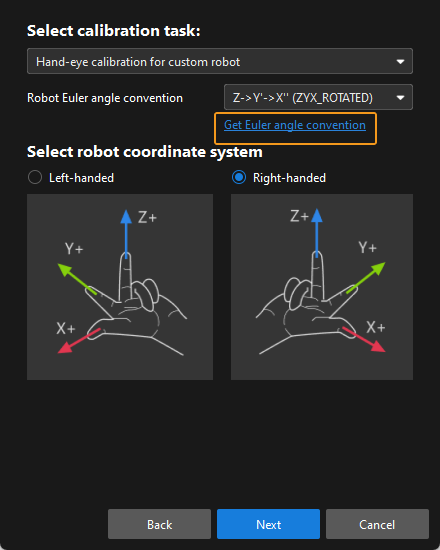
Lorsque la convention des angles d’Euler du robot est inconnue, utilisez l’outil « Obtenir la convention des angles d’Euler » sur l’interface de calibration pendant la configuration préalable. Les instructions détaillées sont les suivantes :
-
Ouvrez Mech-Vision, et cliquez sur le bouton Calibration de la caméra dans la barre d’outils. La fenêtre Configuration avant la calibration s’affichera.
-
Dans la fenêtre Sélectionner la méthode de calibration, cochez le bouton radio Nouvelle calibration, puis cliquez sur le bouton Suivant.
-
Dans la fenêtre Sélectionner la tâche de calibration, choisissez Calibration main-œil pour robot personnalisé dans la liste déroulante, puis cliquez sur Obtenir la convention des angles d’Euler.
-
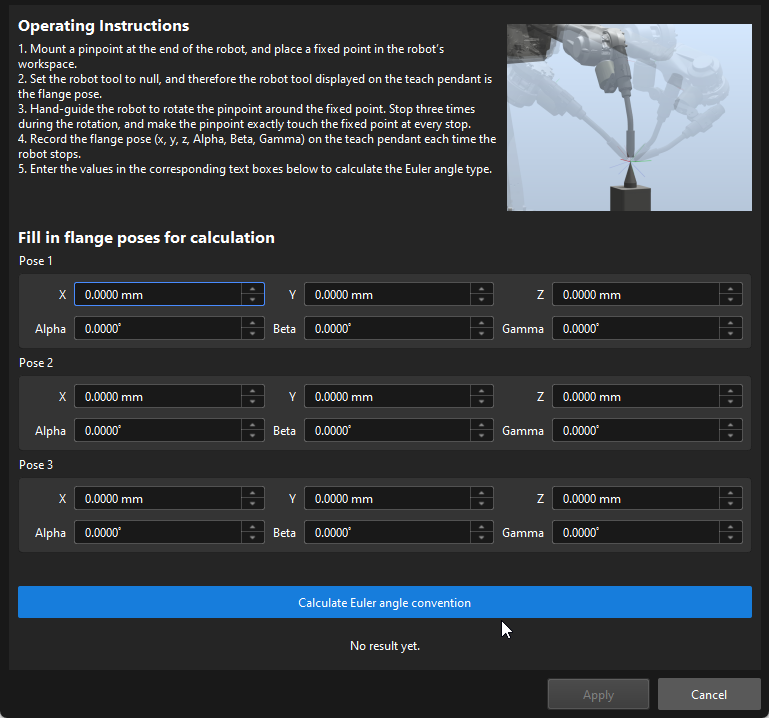
Suivez les instructions de fonctionnement de cet outil pour enregistrer et saisir trois poses de bride du robot, puis cliquez sur Calculer la convention des angles d’Euler pour obtenir la convention des angles d’Euler du robot.
Quelles précautions prendre lors de la vérification et de la correction des paramètres intrinsèques ?
Pour les caméras de la série UHP, le mode camera1 est utilisé pour vérifier les paramètres intrinsèques et effectuer la calibration main-œil, mais la fonction de correction des paramètres intrinsèques ne peut pas être utilisée. Si vous devez corriger les paramètres intrinsèques, veuillez contacter l’assistance technique de Mech-Mind.
Lors de la correction des paramètres intrinsèques :
-
Si une caméra de la série LSR est utilisée, la caméra 2D externe ne peut pas être utilisée en mode 1200W.
-
Si une caméra DEEP-GL est utilisée, la carte de profondeur ne peut pas être sous-échantillonnée.
Quelles sont les précautions pour la calibration manuelle des robots UR ?
Lors de la calibration manuelle d’un robot UR, veuillez noter que le logiciel Mech-Vision ne prend en charge que les quaternions ou les angles d’Euler pour la saisie des poses, tandis que le pupitre d’enseignement du robot UR affiche des vecteurs de rotation. Une saisie directe entraînera des résultats de calibration anormaux.
Comment effectuer la calibration main-œil lorsque le robot (main) et la caméra (œil) ne sont pas dans le même champ de vision pour des scénarios de convoyeur ?
Il peut y avoir plusieurs bras robotisés sur la ligne de tri. Par exemple, la caméra est à l’extrémité d’entrée du convoyeur, et le bras robotisé est plus éloigné de la caméra (par exemple à six mètres).
Dans ce scénario, veuillez vous référer à Guide d’utilisation de la méthode de contact TCP pour la calibration main-œil :
-
La mire de calibration est placée dans le champ de vision de la caméra pour l’acquisition des images.
-
La mire de calibration se déplace le long du convoyeur, et la distance de translation est enregistrée.
-
Le bras du robot utilise la pointe TCP pour toucher la mire de calibration, et la valeur mesurée est diminuée de la distance de translation mentionnée ci-dessus.
Comment effectuer la calibration main-œil pour des robots de type colonne ?
Pour les robots de type colonne (à quatre degrés de liberté) où la caméra est installée en mode ETH, si le contrôleur du robot peut lire correctement les coordonnées de la pointe TCP, la calibration peut être effectuée en se référant au Processus de calibration pour robots portiques.
Comment lire les fichiers de paramètres intrinsèques et extrinsèques dans le logiciel Mech-Vision ?
Pour plus d’informations sur la lecture des résultats de vérification des paramètres intrinsèques dans Mech-Eye SDK, ainsi que sur les fichiers de paramètres intrinsèques et extrinsèques dans le logiciel Mech-Vision, veuillez consulter ce post de la communauté.
Le robot peut-il prendre en charge la calibration automatique si son modèle n’est pas dans la bibliothèque de modèles de robot ?
Vérifiez si la marque de robot est adaptée à la communication Master-Control ou à la communication Standard Interface conformément à Adaptation Master-Control et Adaptation Standard Interface.
-
Si oui, ce modèle de robot peut prendre en charge la calibration automatique après que vous avez créé et importé le modèle de robot.
-
Si non, vous pouvez terminer la configuration pour obtenir une calibration automatisée via la communication Standard Interface selon la FAQ « Un robot non adapté à la communication Standard Interface peut-il prendre en charge la calibration automatique via Standard Interface ? ».
Pourquoi l’option « Automatique » n’apparaît-elle pas dans la fenêtre Configuration avant la calibration après la sélection d’un modèle de robot ?
Pour les robots qui ne sont pas adaptés à la communication Master-Control ou Standard Interface, Mech-Vision ne prend en charge que la calibration manuelle. Par conséquent, seule l’option « Manuel » est affichée dans la fenêtre Configuration avant la calibration, tandis que l’option « Automatique » n’est pas disponible.
Veuillez vous référer aux informations suivantes pour confirmer si la marque de robot sélectionnée est adaptée à la communication Master-Control ou Standard Interface :
Pourquoi l’option « Automatique » n’inclut-elle pas la « communication Standard Interface » pour le robot ?
Si le message « Aucun programme d’exemple de calibration Standard Interface n’est disponible pour cette marque de robot » apparaît après avoir sélectionné « Automatique » et « Master-control », cela indique que la marque de robot sélectionnée n’est pas adaptée à la communication Standard Interface. Vous pouvez également consulter la section Adaptation Standard Interface pour confirmation.
Si vous confirmez que la marque de robot est adaptée à la communication Standard Interface, cela indique qu’il y a un problème avec l’installation du logiciel ou l’environnement d’exécution. Suivez les étapes ci-dessous pour résoudre le problème :
-
Vérifiez si vous avez utilisé les privilèges administrateur lors de l’installation de Mech-Vision et Mech-Viz.
Méthode de vérification : dans l’arborescence des ressources de Mech-Viz, faites un clic droit sur le robot et sélectionnez Ouvrir le répertoire de fichiers du robot, puis retournez au répertoire racine de la bibliothèque de modèles de robot « Robot Library 2.x » dans l’Explorateur. Vérifiez si le fichier « default_robot_communication_settings.json » existe.
-
Si oui, cela indique que les privilèges administrateur ont été utilisés lors de l’installation du logiciel.
-
Si non, veuillez réinstaller le logiciel avec les privilèges administrateur.
-
-
Si un pare-feu a été activé sur l’IPC, veuillez confirmer que le logiciel a été ajouté à la liste blanche du pare-feu.
-
Vérifiez si l’IPC a été ajouté à un domaine. L’adhésion à un domaine peut affecter la fonction de communication. Veuillez contacter votre administrateur informatique pour le dépannage ou la modification de la configuration.
Un robot non adapté à la communication Standard Interface peut-il prendre en charge la calibration automatique via la communication Standard Interface ?
Les robots non adaptés à la communication Standard Interface ne prennent pas en charge la calibration automatique par défaut. Cependant, vous pouvez activer la calibration automatique en utilisant la méthode suivante :
-
Terminez le développement de la fonction de calibration automatique conformément au Manuel de développement Standard Interface.
-
Modifiez les paramètres de configuration de la communication, afin que l’option « Automatique - Standard Interface » soit disponible dans la fenêtre Configuration avant la calibration. Pour des instructions détaillées, veuillez consulter ce post de la communauté.
Dépannage
Mire de calibration non détectée lors de la calibration main-œil
Symptôme :
Lors de la calibration main-œil avec Mech-Vision, la mire de calibration n’a pas pu être détectée ou les cercles de calibration sur la mire n’ont pas pu être détectés.
Versions logicielles concernées :
Toutes les versions de Mech-Vision
Solution :
Le problème peut être résolu en effectuant les étapes suivantes :
-
Vérifiez si la mire de calibration est placée au centre du champ de vision de la caméra.
-
Si oui, passez à l’étape suivante.
-
Si non, placez la mire de calibration au centre du champ de vision de la caméra.
-
-
Vérifiez si la sélection de la mire de calibration est correcte selon Sélection de la mire de calibration.
-
Si oui, passez à l’étape suivante.
-
Si non, veuillez sélectionner à nouveau le modèle de mire de calibration approprié.
-
-
Utilisez Mech-Eye Viewer pour vérifier si les paramètres d’exposition de la caméra sont appropriés. Les temps d’exposition 2D et 3D doivent être correctement réglés afin d’éviter la surexposition et la sous-exposition.
-
Si oui, passez à l’étape suivante.
-
Si non, réajustez les paramètres d’exposition 2D et 3D de la caméra. Si la scène est trop sombre, le mode Flash (Responsive ou Timed) peut être sélectionné dans les paramètres d’exposition 2D de la caméra.
-
-
Vérifiez si le problème est résolu en traçant des cercles d’aide.
-
Si oui, le dépannage est terminé.
-
Si non, veuillez contacter l’assistance technique de Mech-Mind et les informer que les éléments ci-dessus ont été vérifiés.
-
Échec de la vérification des paramètres intrinsèques lors de la calibration main-œil
Symptôme :
Lors de la calibration main-œil avec Mech-Vision, la vérification des paramètres intrinsèques a échoué à l’étape « Monter la mire de calibration et vérifier les paramètres intrinsèques ».
Versions logicielles concernées :
Toutes les versions de Mech-Vision
Solution :
Le problème peut être résolu en effectuant les étapes suivantes :
-
Veuillez vérifier si le modèle standard de mire de calibration sélectionné à cette étape est cohérent avec le modèle réel.
-
Si oui, passez à l’étape suivante.
-
Si non, définissez le paramètre du modèle standard de mire de calibration et vérifiez à nouveau les paramètres intrinsèques.
-
-
Veuillez vérifier si les résultats de la vérification des paramètres intrinsèques répondent aux normes des paramètres intrinsèques.
-
Veuillez contacter l’assistance technique de Mech-Mind pour obtenir une aide supplémentaire.
-
Si non, passez à l’étape suivante.
-
-
Vérifiez si la distance de travail réelle de la caméra répond à la norme de distance de travail.
-
Si oui, passez à l’étape suivante.
-
Si non, ajustez la distance de travail à une plage standard et vérifiez à nouveau les paramètres intrinsèques.
-
-
Utilisez l’outil des paramètres intrinsèques de Mech-Eye Viewer pour vérifier et corriger les paramètres intrinsèques, revérifiez les paramètres intrinsèques, puis vérifiez si le problème a été résolu.
-
Si oui, le dépannage est terminé.
-
Si non, veuillez contacter l’assistance technique de Mech-Mind.
-
Paramètres de trajectoire générés automatiquement anormaux durant la calibration main-œil automatique
Symptôme :
Lors de la calibration main-œil automatique avec Mech-Vision, le logiciel a généré automatiquement une trajectoire de mouvement, mais les paramètres de trajectoire étaient anormaux.
Versions logicielles concernées :
Toutes les versions de Mech-Vision
Solution :
Le problème peut être résolu en effectuant les étapes suivantes :
-
Vérifiez si le modèle de robot est correct.
-
Si oui, passez à l’étape 2.
-
Si non, passez à l’étape 4.
-
-
Vérifiez si la mire de calibration sort du champ de vision de la caméra pendant la calibration.
-
Si oui, passez à l’étape 3.
-
Si non, continuez les étapes de calibration suivantes.
-
-
Vérifiez si la mire de calibration a été déplacée ou tournée manuellement avant la calibration.
-
Si oui, réexécutez l’ensemble du processus de calibration.
-
Si non, veuillez contacter l’assistance technique de Mech-Mind et les informer que les éléments ci-dessus ont été vérifiés.
-
-
Sélectionnez le modèle de robot correct dans la fenêtre Configuration de la communication du robot et effectuez à nouveau la calibration pour vérifier si le problème a été résolu.
-
Si oui, le dépannage est terminé.
-
Si non, passez à l’étape 5.
-
-
Vérifiez si le repère de référence du robot (repère de base ou repère de bride) côté robot est correctement sélectionné.
-
Si oui, veuillez contacter l’assistance technique de Mech-Mind et les informer que les éléments ci-dessus ont été vérifiés.
-
Si non, sélectionnez le repère correct côté robot et effectuez une nouvelle calibration.
-
Délai d’expiration du mouvement du robot durant la calibration main-œil automatique
Symptôme :
Lors de la calibration main-œil automatique avec Mech-Vision, le mouvement du robot a expiré.
Versions logicielles concernées :
Toutes les versions de Mech-Vision
Solution :
Le problème peut être résolu en effectuant les étapes suivantes :
-
Vérifiez si le robot se déplace lentement.
-
Si oui, augmentez la vitesse de déplacement du robot et recalibrez le robot.
-
Si non, passez à l’étape 2.
-
-
Vérifiez si des erreurs non liées à la vision se produisent côté robot.
-
Si oui, passez à l’étape 3.
-
Si non, vérifiez l’état du robot et assurez-vous qu’il est en mode de fonctionnement continu (exécution continue manuelle ou exécution continue automatique).
-
-
Vérifiez si des points de passage sont inatteignables ou si des problèmes de singularité se produisent côté robot.
-
Si oui, passez à l’étape 4.
-
Si non, veuillez contacter l’assistance technique de Mech-Mind, fournir une photo de l’erreur du robot et les informer que les éléments ci-dessus ont été vérifiés.
-
-
Vérifiez si des points de passage sont inatteignables côté robot.
-
Si oui, passez à l’étape 5.
-
Si non, passez à l’étape 6.
-
-
Vérifiez si les limites logicielles du modèle de robot correspondent à celles du robot réel.
-
Si oui, veuillez contacter l’assistance technique de Mech-Mind et les informer que les éléments ci-dessus ont été vérifiés.
-
Si non, réglez les limites logicielles pour le modèle de robot et effectuez une nouvelle calibration.
-
-
Vérifiez si des problèmes de singularité se produisent côté robot.
-
Si oui, veuillez exécuter l’étape 7.
-
Si non, veuillez contacter l’assistance technique de Mech-Mind, fournir une photo de l’erreur du robot et les informer que les éléments ci-dessus ont été vérifiés.
-
-
Changez le type de mouvement en mouvement articulé (veuillez faire attention aux collisions avec les objets de la scène), puis recalibrez pour vérifier si le problème a été résolu.
-
Si oui, le dépannage est terminé.
-
Si non, changez la position de calibration et effectuez à nouveau la calibration.
-
Erreur de discordance de distance de déplacement lors de la calibration main-œil manuelle
Symptôme :
Lors de la calibration main-œil manuelle avec Mech-Vision, une erreur de discordance de distance de déplacement est apparue à l’étape « Capturer des images et des poses ».
Versions logicielles concernées :
Toutes les versions de Mech-Vision
Solution :
Vérifiez si la pose de la bride du robot saisie manuellement est correcte.
-
Veuillez contacter l’assistance technique de Mech-Mind pour obtenir une aide supplémentaire.
-
Si non, ressaisissez la pose de la bride du robot.
Erreur de discordance de distance de déplacement lors de la calibration main-œil automatique
Symptôme :
Lors de la calibration main-œil automatique avec Mech-Vision, une erreur de discordance de distance de déplacement est apparue à l’étape « Capturer des images et des poses ».
Versions logicielles concernées :
Toutes les versions de Mech-Vision
Solution :
Le problème peut être résolu en effectuant les étapes suivantes :
-
Vérifiez la précision du robot pour des problèmes potentiels (concentrez-vous sur l’axe Z).
-
Si oui, veuillez améliorer la précision du robot. Cela implique principalement d’ajuster la position zéro du robot, de définir correctement la charge utile du robot et de contacter le fabricant du robot pour étalonner la précision du robot.
-
Si non, passez à l’étape 2.
-
-
Vérifiez si la caméra est une caméra V4. Une caméra V4 désigne une caméra dont le 10e chiffre de le numéro de série est 4.
-
Si oui, passez à l’étape 3.
-
Si non, passez à l’étape 4.
-
-
Vérifiez les paramètres intrinsèques de la caméra à différentes hauteurs, enregistrez les images brutes de la mire de calibration, restaurez les paramètres intrinsèques d’usine de la caméra V4 (une précision anormale peut être causée par des opérations incorrectes de correction des paramètres intrinsèques), puis vérifiez si le problème a été résolu.
-
Si oui, le dépannage est terminé.
-
Si non, utilisez l’outil des paramètres intrinsèques de Mech-Eye Viewer pour vérifier et corriger les paramètres intrinsèques.
-
-
S’il s’agit d’une caméra antérieure à la série V4, vérifiez si les paramètres intrinsèques de la caméra sont extrêmement anormaux.
-
Si oui, utilisez l’outil des paramètres intrinsèques de Mech-Eye Viewer pour vérifier et corriger les paramètres intrinsèques. Si le problème persiste, veuillez passer à l’étape 5.
-
Si non, passez à l’étape 5.
-
-
Vérifiez si le mode de montage de la caméra est ETH ou EIH.
-
En cas d’ETH, assurez-vous que la plage de calibration couvre la zone de travail du robot, et sélectionnez Calculer la compensation du système main-œil (le mode développeur doit être activé) lors du calcul des paramètres extrinsèques. Si le problème persiste, veuillez contacter l’assistance technique de Mech-Mind.
-
En cas d’EIH, veuillez contacter l’assistance technique de Mech-Mind.
-
Mauvais résultats de calibration après la calibration main-œil
Symptôme :
Après que la calibration main-œil a été terminée avec succès, les résultats de calibration étaient mauvais, mais la mire de calibration ne s’est pas déformée.
De mauvais résultats de calibration indiquent que l’erreur de 100 % des points de données dans la vue du nuage de points est supérieure aux valeurs empiriques ci-dessous.
-
UHP-140-GL: ±0.5 mm
-
PRO S-GL: ± 1 mm
-
NANO ULTRA-GL: ±1.5 mm
-
PRO M-GL: ±2 mm
-
LSR L-GL:±4 mm
-
DEEP-GL: ±5 mm
Versions logicielles concernées :
Toutes les versions de Mech-Vision
Solution :
Si le résultat de calibration dépasse légèrement la valeur empirique, vous pouvez résoudre le problème comme suit :
-
Vérifiez si la mire de calibration bouge.
-
Si oui, fixez la mire de calibration et effectuez à nouveau la calibration.
-
Si non, passez à l’étape suivante.
-
-
Vérifiez la précision du robot pour des problèmes potentiels.
-
Si oui, veuillez améliorer la précision du robot. Cela implique principalement d’ajuster la position zéro du robot, de définir correctement la charge utile du robot et de contacter le fabricant du robot pour étalonner la précision du robot.
-
Si non, passez à l’étape suivante.
-
-
Vérifiez si les paramètres d’exposition de la caméra sont appropriés. Ajustez les paramètres d’exposition comme suit.
-
Désactivez le gain, utilisez une seule exposition et réglez l’exposition 3D de manière appropriée pour résoudre les problèmes de surexposition et de sous-exposition. La surexposition et la sous-exposition entraînent non seulement une perte de nuage de points, mais provoquent également une augmentation des fluctuations du nuage de points, ce qui affecte la précision de la calibration.
-
Pour les scénarios trop sombres : le mode Flash (Responsive, Timed) peut être sélectionné pour l’exposition 2D.
-
Sélectionnez le mode de lissage du nuage de points : si le nuage de points de la mire de calibration fluctue fortement avec la caméra DEEP-GL ou LSR, le résultat de calibration est mauvais. Modifiez le mode de lissage du nuage de points en « fort ».
-
-
Vérifiez si le problème a été résolu.
-
Si oui, le dépannage est terminé.
-
Si non, effectuez une nouvelle calibration. Notez que la plage de calibration doit être plus étroite pour éviter qu’une erreur de précision du robot n’influence excessivement les résultats des paramètres extrinsèques.
-
Si une calibration manuelle est effectuée et que le résultat de calibration dépasse largement la valeur empirique, par exemple, seulement 15 % des points de données ont des erreurs conformes aux exigences, et les points de rotation sont rouges, vous pouvez résoudre le problème comme suit :
-
Vérifiez si la méthode de montage de la caméra sélectionnée est correcte (œil vers main ou œil dans la main). Si elle est incorrecte, veuillez la modifier.
-
Vérifiez si la convention des angles d’Euler est correctement sélectionnée. Si elle est incorrecte, veuillez la modifier.
-
Vérifiez si les valeurs Rx et Rz dans la pose de bride du robot saisie sont incorrectes. Si elles sont incorrectes, veuillez les modifier.
-
Vérifiez si les systèmes de coordonnées droitier et gaucher ont été mal sélectionnés. Si c’est le cas, veuillez les modifier.
-
Vérifiez si la pose de bride du robot saisie est correcte. Si elle est incorrecte, veuillez la modifier.
-
Si le problème persiste après avoir effectué les vérifications ci-dessus, veuillez enregistrer les données de calibration et contacter l’assistance technique de Mech-Mind.
Si des points de calibration individuels dans le visualiseur de nuage de points sont rouges, vous pouvez résoudre le problème comme suit :
-
Vérifiez si le point de calibration marqué en rouge se trouve au bord du champ de vision de la caméra.
-
Si oui, la plage de calibration est inappropriée. Supprimez les données rouges et ajoutez manuellement des données de point de calibration appropriées.
-
Si non, passez à l’étape suivante.
-
-
Vérifiez si les paramètres d’exposition de la caméra sont appropriés. Ajustez les paramètres d’exposition comme suit.
-
Désactivez le gain, utilisez une seule exposition et réglez l’exposition 3D de manière appropriée pour résoudre les problèmes de surexposition et de sous-exposition. La surexposition et la sous-exposition entraînent non seulement une perte de nuage de points, mais provoquent également une augmentation des fluctuations du nuage de points, ce qui affecte la précision de la calibration.
-
Pour les scénarios trop sombres : le mode Flash (Responsive, Timed) peut être sélectionné pour l’exposition 2D.
-
Sélectionnez le mode de lissage du nuage de points : si le nuage de points de la mire de calibration fluctue fortement avec la caméra DEEP-GL ou LSR, le résultat de calibration est mauvais. Modifiez le mode de lissage du nuage de points en « fort ».
-
-
Vérifiez si le problème a été résolu.
-
Si oui, le dépannage est terminé.
-
Si non, veuillez contacter l’assistance technique de Mech-Mind.
-
Résultats de calibration vérifiés comme non conformes après la calibration main-œil
Symptôme :
Après la fin de la calibration main-œil, les résultats de calibration sont vérifiés. Cependant, les résultats ne sont pas conformes aux normes. Les symptômes sont les suivants :
-
Dans Scene Viewer, lors de la vérification de l’alignement entre le nuage de points du robot et son modèle, un grand écart a été observé.
-
Pour la calibration EIH, un décalage significatif du nuage de points de la mire de calibration par rapport au point fixe a été observé dans Scene Viewer.
Versions logicielles concernées :
Toutes les versions de Mech-Vision
Solution :
Si, après la calibration EIH, la vérification montre que le nuage de points de la mire de calibration n’a pas de décalage significatif par rapport au point fixe, veuillez vous référer à Mauvais résultats de calibration après la calibration main-œil. Si le nuage de points de la mire présente un décalage significatif par rapport au point fixe, vous pouvez résoudre le problème comme suit :
-
Vérifiez si la caméra a un décalage.
-
Si oui, réinitialisez le décalage.
-
Si non, passez à l’étape suivante.
-
-
Vérifiez si le robot est sur un rail coulissant.
-
Si oui, passez à l’étape 3.
-
Si non, passez à l’étape 4.
-
-
Confirmez si la pose de bride du robot est couplée avec la valeur d’axe externe.
-
Si oui, vérifiez la position sous plusieurs angles pour voir si le rail coulissant se trouve à la même position.
-
Si oui, passez à l’étape 4.
-
Si non, déplacez le rail coulissant à la position de calibration et effectuez une nouvelle calibration. Si le problème persiste, passez à l’étape 4.
-
-
Si non, réduisez la plage de calibration et effectuez une nouvelle calibration.
-
-
Vérifiez si le robot est un robot à quatre axes.
-
Si oui, passez à l’étape 5.
-
Si non, passez à l’étape 6.
-
-
Vérifiez s’il existe un écart entre la position affichée du nuage de points de la mire de calibration et la position réelle dans la direction Z.
-
Si non, confirmez que l’état du mode compatibilité de Mech-Vision et Mech-Viz est incohérent (par exemple, Mech-Vision est en mode compatibilité, tandis que Mech-Viz n’est pas en mode compatibilité). Si ce n’est pas le cas, assurez-vous que le mode de compatibilité des deux logiciels est cohérent.
-
Vérifiez si la calibration et la prise d’images utilisent le même TCP.
-
Si oui, vérifiez si le fichier des paramètres extrinsèques est rechargé.
-
Si non, passez à l’étape suivante.
-
-
Vérifiez si le programme robot déclenche la prise d’images en utilisant la pose de bride.
-
Si oui, vérifiez si la pose de bride est utilisée dans la configuration de calibration. Si ce n’est pas le cas, veuillez utiliser la pose de bride pour une nouvelle calibration.
-
Si non, modifiez la configuration de la prise d’images dans le programme robot pour utiliser la pose de bride.
-
Si, après la calibration ETH, la vérification montre que le nuage de points du robot ne s’écarte pas significativement du modèle du robot, veuillez vous référer à Mauvais résultats de calibration après la calibration main-œil. S’il existe un écart significatif entre le modèle du robot et le nuage de points du robot, vous pouvez résoudre le problème comme suit :
-
Vérifiez si la caméra a un décalage.
-
Si oui, réinitialisez le décalage.
-
Si non, passez à l’étape suivante.
-
-
Vérifiez si le robot est sur un rail coulissant.
-
Si oui, passez à l’étape 3.
-
Si non, passez à l’étape 5.
-
-
Confirmez si la pose de bride du robot est couplée avec la valeur d’axe externe.
-
Si oui, découplez les valeurs d’axes externes puis utilisez le repère du robot pour la calibration main-œil.
-
Si non, vérifiez la position sous plusieurs angles pour voir si les rails coulissants se trouvent à la même position. Si oui, passez à l’étape 4. Si non, déplacez le rail coulissant à la position de calibration et effectuez une nouvelle calibration. Si le problème persiste, veuillez contacter l’assistance technique de Mech-Mind et les informer des éléments vérifiés.
-
-
Vérifiez si le robot est un robot à quatre axes.
-
Si oui, passez à l’étape 5.
-
Si non, passez à l’étape 6.
-
-
Vérifiez s’il existe un écart entre la position affichée du nuage de points de la mire de calibration et la position réelle dans la direction Z.
-
Si non, confirmez que l’état du mode compatibilité de Mech-Vision et Mech-Viz est incohérent (par exemple, Mech-Vision est en mode compatibilité, tandis que Mech-Viz n’est pas en mode compatibilité). Si ce n’est pas le cas, assurez-vous que le mode de compatibilité des deux logiciels est cohérent.
-
Vérifiez si le point de départ de la calibration et le point de prise d’images utilisent le même TCP.
-
Si oui, vérifiez si le fichier des paramètres extrinsèques est rechargé.
-
Si non, passez à l’étape suivante.
-
-
Vérifiez si le programme robot déclenche la prise d’images en utilisant la pose de bride.
-
Si oui, vérifiez si la pose de bride est utilisée dans la configuration de calibration. Si ce n’est pas le cas, veuillez utiliser la pose de bride pour une nouvelle calibration.
-
Si non, modifiez la configuration de la prise d’images dans le programme robot pour utiliser la pose de bride.
-