Relaxation rotationnelle
La relaxation de préhension inclut une relaxation translationnelle et rotationnelle. Cette section se concentre sur la relaxation rotationnelle.
Introduction
Lorsque le robot saisit au point de préhension, la pose de préhension du robot est autorisée à être orientée de manière flexible dans un intervalle angulaire spécifique, ce qui correspond à la relaxation rotationnelle. En définissant la relaxation rotationnelle, le robot peut exploiter cette tolérance de manière flexible afin d’éviter des problèmes tels que des collisions et des singularités.
Si la pose de dépose est définie sur « Pose de l’objet cible » et que le robot saisit l’objet cible avec une relaxation rotationnelle. Le logiciel enregistrera automatiquement l’écart angulaire entre la pose de préhension réelle et la pose de l’objet cible. Lorsque le robot dépose l’objet cible, le logiciel ajustera la pose de l’outil en fonction de l’écart angulaire et garantira que l’objet cible puisse être placé correctement.
Déterminer l’axe de référence
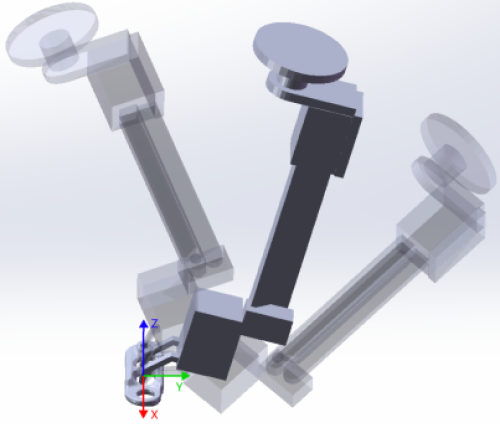
Comme illustré sur la figure ci-dessous, l’outil peut saisir l’objet cible de manière flexible dans certains degrés autour de l’axe X de la pose de l’objet cible, et l’axe X est donc l’axe de référence.
Plage de tentatives et pas de tentative
La plage de tentatives est l’écart angulaire maximal autorisé entre la pose de préhension et la pose issue de la vision. L’angle entre B et C représente la plage de tentatives.
Le pas de tentative spécifie l’intervalle en degrés entre deux tentatives de préhension. L’angle ∠a dans la figure ci-dessous représente le pas de tentative.
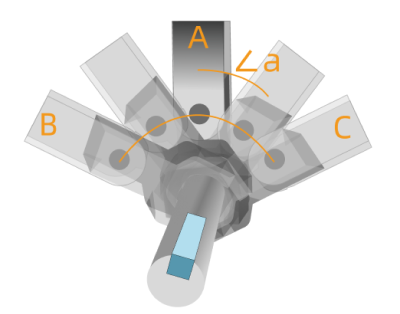
« A » représente la pose de préhension lorsque l’outil est au point de préhension, tandis que « B » et « C » représentent la pose lorsque l’outil saisit à la limite de la plage de tentatives.
Nombre de tentatives
Le nombre de tentatives est calculé automatiquement à partir de la plage de tentatives et du pas de tentative.
En supposant que le pas de tentative soit de 5° et que la plage de tentatives soit de ±10°, alors le nombre de tentatives dans une direction peut être calculé par 10/5 = 2, ce qui correspond à 2 tentatives aux angles de 5° et 10°. Le nombre de tentatives total = 1 + 2 * 2 = 5, qui sont aux angles -10°, -5°, 0°, 5° et 10°.