Sous-échantillonner le nuage de points
Fonction
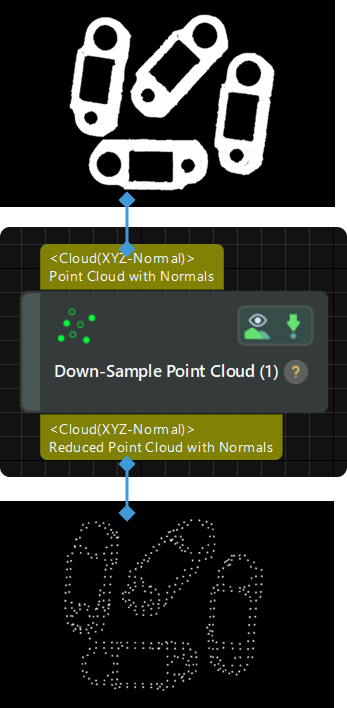
Cette étape est utilisée pour sous-échantillonner un nuage de points afin de réduire le nombre de points.
Scénario d’utilisation
Cette étape est généralement utilisée pour le prétraitement du nuage de points lorsqu’il y a trop de points à traiter, afin d’améliorer la vitesse d’exécution du projet.
Description des paramètres
- Type d’échantillonnage
-
Description: Ce paramètre permet de sélectionner la méthode d’échantillonnage à utiliser.
Liste des valeurs: UniformSampler, VoxelGridSampler
-
UniformSampler: Méthode d’échantillonnage uniforme. Divise le nuage de points en grilles 3D de taille fixe, et seul le point le plus proche du centre de la grille sera conservé dans chaque grille afin de réduire la densité du nuage de points.
-
VoxelGridSampler: Méthode d’échantillonnage par voxels. Divise le nuage de points en grilles 3D de taille fixe, calcule les normales et les positions moyennes de tous les points dans chaque grille, génère un nouveau point à partir de cette moyenne et écarte les autres points afin de réduire la densité du nuage de points.
Valeur par défaut: VoxelGridSampler
Recommandation de réglage: Il est recommandé d’utiliser la valeur par défaut.
-
- Intervalle d’échantillonnage
-
Description: Ce paramètre est utilisé pour définir la longueur d’arête de la grille 3D lors du sous-échantillonnage. Plus la valeur est grande, plus le nuage de points sous-échantillonné sera clairsemé.
Valeur par défaut: 10.000 mm