Appariement et classification 3D (modèles multiples)
Fonction
Cette Étape peut apparier les objets de la scène à l’aide de plusieurs modèles de nuage de points et produire les poses et les étiquettes de classe des objets.
Scénario d’utilisation
Cette Étape est généralement utilisée pour l’appariement et la classification d’un seul objet dans la scène. S’il y a plusieurs objets dans la scène, on peut d’abord utiliser le regroupement de nuages de points ou l’apprentissage profond pour segmenter les objets, puis chaque objet peut être apparié et classé en utilisant cette Étape.
Entrée et sortie
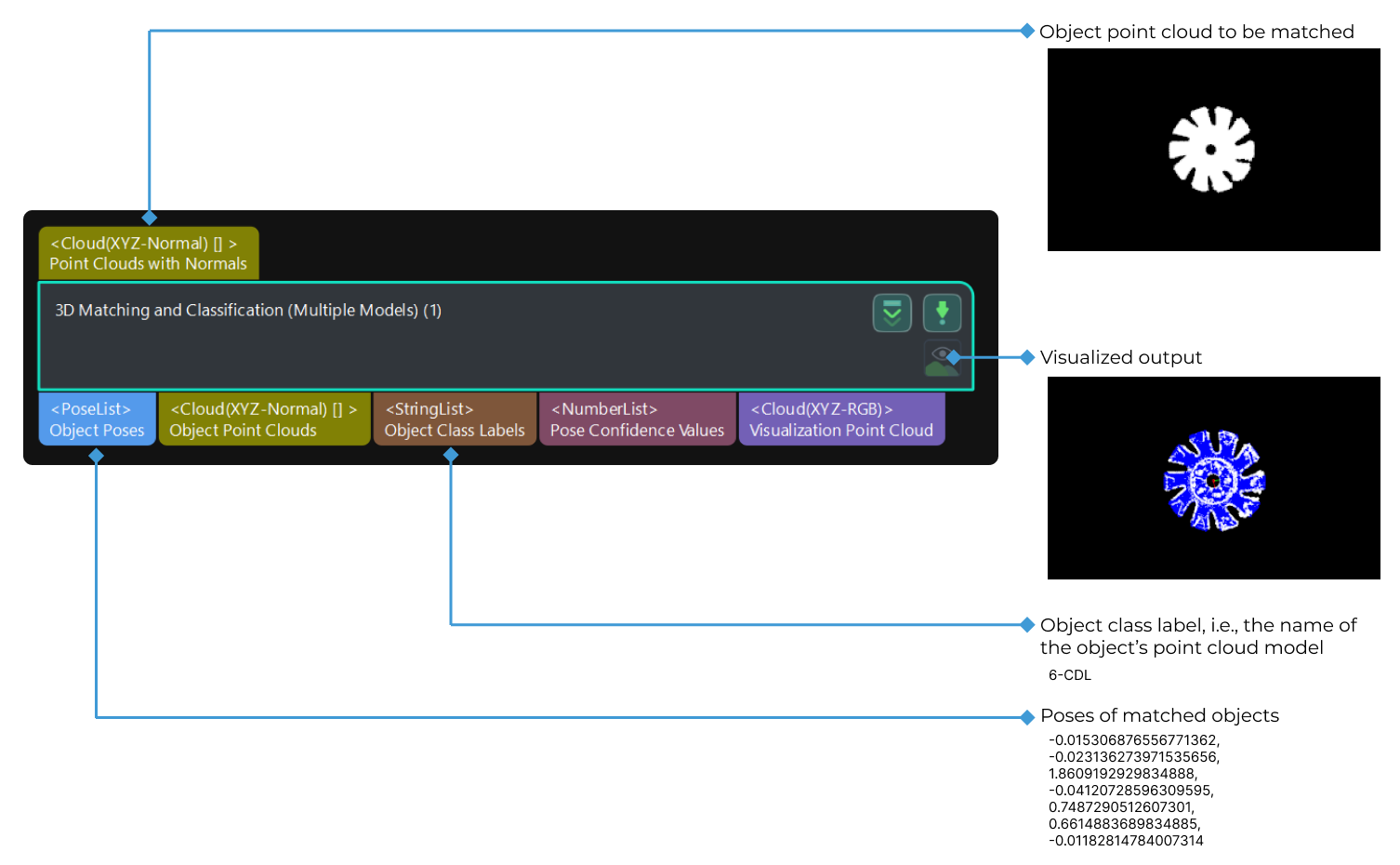
Après avoir fourni les nuages de points des objets, cette Étape produira des poses d’objet en quantité égale au nombre de nuages de points.
Les entrées et sorties de cette Étape sont illustrées ci-dessous avec l’exemple de l’entrée d’un nuage de points d’un seul objet.
Description des paramètres
Niveau de réglage des paramètres
Description du paramètre : Ce paramètre est utilisé pour sélectionner le niveau de réglage des paramètres. Les paramètres diffèrent selon les niveaux de réglage.
Liste des valeurs : Basique, Avancé
Valeur par défaut : Basique
Recommandation de réglage : Sélectionnez le niveau de réglage des paramètres selon vos besoins.
Niveau de réglage basique des paramètres
Paramètres du modèle
- Sélectionner le modèle
-
Description : Ce paramètre sert à sélectionner le modèle de nuage de points.
Instruction : Sélectionnez un modèle de nuage de points disponible dans la liste déroulante. Veuillez vous référer à Création du modèle de nuage de points et du point de préhension pour plus d’informations sur la création d’un modèle de nuage de points.
-
Le type de modèle de nuage de points doit être identique. Vous ne pouvez pas sélectionner simultanément un modèle de nuage de points de surface et un modèle de nuage de points de contours.
-
Les tailles des modèles de nuage de points ne doivent pas trop différer. Il est recommandé que l’écart entre le plus grand modèle de nuage de points et le plus petit ne dépasse pas 1,5 fois. Sinon, la vitesse d’appariement sera affectée. S’il existe un grand écart de taille entre les modèles de nuage de points, il est recommandé de classer d’abord le nuage de points de la scène en entrée en utilisant l’Étape Classer les nuages de points par dimensions.
-
- Mode d’appariement
-
Description : Ce paramètre est utilisé pour sélectionner le mode en fonction du type de modèle de nuage de points. Si le modèle de nuage de points représente le contour de l’objet, sélectionnez « Appariement de contours ». Si le modèle de nuage de points représente la surface de l’objet, sélectionnez « Appariement de surface ».
Liste des valeurs : Appariement de surface, Appariement de contours.
-
Appariement de surface : Utiliser le modèle de surface de l’objet pour l’appariement de modèle de nuage de points.
-
Appariement de contours : Utiliser le modèle de contours de l’objet pour l’appariement de modèle de nuage de points.
Recommandation de réglage : Lorsque la surface de l’objet présente des caractéristiques reconnaissables évidentes (telles que vilebrequins, rotors et tiges d’acier), il est recommandé d’utiliser l’appariement de surface. Vous devez créer un modèle de nuage de points représentant les caractéristiques de surface de l’objet. Lorsque l’objet est relativement plat et présente des caractéristiques de contours claires et régulières sous la caméra (telles que panneaux, semelles de chenille, bielles et disques de frein), il est recommandé d’utiliser l’appariement de contours. Vous devez créer un modèle de nuage de points représentant les caractéristiques de contours de l’objet.
Si vous sélectionnez Appariement de contours, vous devez fournir des nuages de points dont les contours ont été extraits.
-
Paramètres d’appariement grossier
- Mode de fonctionnement
-
Description : Ce paramètre est utilisé pour sélectionner le mode de fonctionnement pour l’appariement grossier.
Liste des valeurs : Haute vitesse, Standard, Haute précision, Précision extra-élevée et Personnalisé.
Instruction : Dans tous les modes de fonctionnement, la précision et la vitesse d’appariement diffèrent en raison du nombre de points dans les modèles de nuage de points. Le tableau suivant fournit une description détaillée.
Mode de fonctionnement Nombre de points dans les modèles de nuage de points Caractéristiques d’appariement Haute vitesse
200
Haute vitesse, faible précision
Standard
300
Relativement stable
Haute précision
400
Haute précision, faible vitesse
Précision extra-élevée
500
Précision la plus élevée
Personnalisé
Personnalisé
Déterminé par un nombre de points personnalisé
- Nombre de points attendu du modèle
-
Description : Ce paramètre sert à définir le nombre de points attendu dans le modèle de nuage de points.
Valeur par défaut : 200
Instruction : Définissez ce paramètre lorsque Mode de fonctionnement est Personnalisé.
Recommandation de réglage : Veuillez définir le paramètre en fonction du besoin réel.
Lorsque les résultats d’appariement ou de classification ne sont pas satisfaisants, il est recommandé de prioriser l’ajustement de ce paramètre pour augmenter le « Nombre de points attendu du modèle ».
Paramètres d’appariement fin
- Mode de fonctionnement
-
Description : Ce paramètre est utilisé pour sélectionner le mode de fonctionnement pour l’appariement fin.
Liste des valeurs : Haute vitesse, Standard, Haute précision, et Précision extra-élevée.
Instruction : Veuillez vous référer aux modes de fonctionnement des « Paramètres d’appariement grossier ».
Paramètres de validation
- Seuil de confiance
-
Description : Si la confiance du résultat d’appariement est supérieure au seuil, le résultat d’appariement est valide. Plus la valeur de confiance est élevée, plus le résultat d’appariement est précis.
Valeur par défaut : 0.300
Niveau de réglage avancé des paramètres
Paramètres du modèle
Vous pouvez vous référer au Niveau de réglage basique des paramètres.
Paramètres d’appariement grossier
Vous pouvez vous référer au Niveau de réglage basique des paramètres.
- Nombre de points attendu du modèle
-
Vous pouvez vous référer au Niveau de réglage basique des paramètres.
- Limite supérieure du nombre de paires de points par caractéristique
-
Description : Ce paramètre sert à spécifier le nombre maximal de paires de points contenues dans chaque caractéristique lors de l’analyse du modèle. Plus cette valeur est petite, plus la vitesse de traitement est rapide, mais plus la précision des résultats d’appariement est faible.
Valeur par défaut : 50
Paramètres de vote
- Quantification de la distance
-
Description : Paramètre pour la quantification de la distance entre les points (Distance entre deux points = Quantification de la distance * Intervalle d’échantillonnage). Plus la valeur est grande, moins les résultats d’appariement sont précis.
Valeur par défaut : 1.00
- Quantification de l’angle
-
Description : Paramètre pour la quantification de l’angle entre les normales des points de la paire (Angle entre deux vecteurs = 360°/Quantification de l’angle). Plus cette valeur est grande, plus les résultats d’appariement sont précis, mais cela nécessite également une qualité de nuage de points plus élevée.
Valeur par défaut : 60
- Seuil inférieur du rapport de vote
-
Description : Dans le processus d’appariement, chaque pose d’objet obtient un score. Lorsque le score de la pose est supérieur au « produit du Score le plus élevé dans le vote et du Seuil inférieur du rapport de vote », la pose correspondante sera impliquée dans la vérification des poses. Plus cette valeur est faible, plus il est probable de trouver une correspondance exacte, mais le temps d’exécution sera également plus long.
Valeur par défaut : 0.80
- Étape d’échantillonnage des points de référence
-
Description : Ce paramètre sert à ajuster la taille du pas pour sous-échantillonner le nuage de points de la scène et obtenir des points de référence qui forment des paires de points avec les points référés. Lorsque la valeur est plus grande, les points d’échantillonnage intervallaires sont moins nombreux, la vitesse d’exécution est plus rapide, mais la précision de l’appariement est réduite.
Valeur par défaut : 5
- Étape d’échantillonnage des points référés
-
Description : Ce paramètre sert à ajuster la taille du pas pour sous-échantillonner le nuage de points de la scène et obtenir des points référés qui forment des paires de points avec les points de référence. Lorsque la valeur est plus grande, les points d’échantillonnage intervallaires sont moins nombreux, la vitesse d’exécution est plus rapide, mais la précision de l’appariement est réduite.
Valeur par défaut : 1
Paramètres de vérification des poses
- Utiliser le NMS de distance
-
Description : Après sélection de ce paramètre, les poses candidates dont la distance aux poses sélectionnées est inférieure à 0,1 fois le diamètre de l’objet seront filtrées.
Valeur par défaut : sélectionné.
- Stratégie de génération de la longueur de voxel
-
Description : Ce paramètre est utilisé pour sélectionner la méthode de génération de la longueur de voxel.
Valeur par défaut : Auto.
Recommandation de réglage : « Auto » est recommandé pour les nouveaux utilisateurs.
- Longueur de voxel
-
Description : Ce paramètre sert à définir la longueur (mm) du voxel. Plus la valeur est grande, moins les résultats d’appariement sont précis.
Valeur par défaut : 3.000 mm
- Limite inférieure de la longueur de voxel
-
Description : Ce paramètre sert à définir la longueur de voxel minimale (mm).
Valeur par défaut : 1.000 mm
- Limite supérieure de la longueur de voxel
-
Description : Ce paramètre sert à définir la longueur de voxel maximale (mm).
Valeur par défaut : 15.000 mm
Paramètres de filtrage des poses (disponible uniquement en mode appariement de contours)
- Filtrer les poses selon l’angle de rotation du modèle
-
Description : En mode appariement de contours, le modèle de nuage de points peut devoir être tourné d’un certain angle pour correspondre au nuage de points de la scène, et les poses seront filtrées selon l’angle de rotation du modèle de nuage de points. Lorsque l’angle de rotation du modèle dépasse le « Seuil supérieur de différence d’angle », la pose sera filtrée.
Valeur par défaut : sélectionné.
- Seuil supérieur de différence d’angle
-
Description : Veuillez vous référer au paramètre « Filtrer les poses selon l’angle de rotation du modèle » pour plus de détails.
Paramètres d’appariement fin
- Capacité de correction de la déviation
-
Description : Ce paramètre sert à définir l’intensité de la correction de la déviation appliquée au résultat d’appariement provenant de l’appariement 3D grossier. Plus la capacité de correction de la déviation est grande, plus il est probable que les poses appariées grossièrement puissent être corrigées en poses appariées précisément. Veuillez noter qu’une capacité de correction excessive peut entraîner une perte de précision d’appariement.
Liste des valeurs : Petite, Moyenne et Grande.
Valeur par défaut : Petite.
- Mode de fonctionnement
-
Description : Vous pouvez vous référer au Niveau de réglage basique des paramètres.
Paramètres de symétrie
- Axe de symétrie
-
Description : Ce paramètre est utilisé pour sélectionner l’axe de symétrie de rotation afin de faire tourner la pose initiale de l’objet.
Liste des valeurs : ROTATE_BY_X, ROTATE_BY_Y et ROTATE_BY_Z
Valeur par défaut : ROTATE_BY_Z
- Pas d’angle de symétrie (0–360)
-
Description : Ce paramètre sert à définir le pas pour modifier l’orientation initiale de « Angle de rotation minimal » à « Angle de rotation maximal ». L’unité est le degré (°).
Valeur par défaut : 360.0°
Instructions de réglage : La valeur du paramètre « Pas d’angle de symétrie » doit être supérieure à 0.
- Angle de rotation minimal
-
Description : Ce paramètre spécifie l’angle de rotation minimal pour la rotation de la pose selon le « Pas d’angle de symétrie ». L’unité est le degré (°).
Valeur par défaut : -180.0°
- Angle de rotation maximal
-
Description : Ce paramètre spécifie l’angle de rotation maximal pour la rotation de la pose selon le « Pas d’angle de symétrie ». L’unité est le degré (°).
Valeur par défaut : 180.0°
Paramètres de validation (Les paramètres doivent être ajustés en mode appariement de surface)
- Ne considérer que la surface visible du modèle
-
Description : Une fois ce paramètre sélectionné, seule la partie visible du modèle de nuage de points de surface sera impliquée dans l’appariement, ce qui facilite le calcul et produit une confiance d’appariement plus raisonnable.
Valeur par défaut : non sélectionné.
Recommandation de réglage : Il est recommandé de sélectionner ce paramètre pour les modèles d’objet qui comportent des parties non visibles par la caméra sous un angle de vue, tel que le modèle complet d’un objet cylindrique. Pour les modèles d’objet entièrement visibles sous le même angle de vue, tels que le modèle d’appariement de surface de la face supérieure d’un disque de frein, ce paramètre peut être ignoré.
Visualisation des résultats
- Options de visualisation
-
Description : Après activation de « Sortie de débogage », l’option sélectionnée sera générée et affichée.
Liste des valeurs : Résultat de l’appariement grossier, Résultat de l’appariement fin, Modèle sous-échantillonné pour l’appariement grossier, Modèle sous-échantillonné pour l’appariement fin, Nuage de points de la scène sous-échantillonné pour l’appariement grossier, Nuage de points de la scène sous-échantillonné pour l’appariement fin.
Valeur par défaut : Résultat de l’appariement fin.
- Visualiser uniquement le résultat d’appariement actuel
-
Description : Une fois ce paramètre sélectionné, seul le résultat d’appariement correspondant au modèle actuel sera visualisé.
Valeur par défaut : non sélectionné.
Instruction : Sélectionnez le modèle pour la visualisation si ce paramètre n’est pas sélectionné.
- Sélectionner le modèle pour la visualisation
-
Description : Ce paramètre sert à sélectionner le modèle de nuage de points que vous souhaitez visualiser.
Recommandation de réglage : Définissez ce paramètre après avoir désélectionné Visualiser uniquement le résultat d’appariement actuel.