Comment utiliser Mech-Viz
Cette section présente le flux de travail de base pour utiliser Mech-Viz afin de calculer une trajectoire sans collision et de prélever des objets.
Dans des situations réelles, le flux de travail avec Mech-Viz comprend six étapes, comme montré dans la figure ci-dessous :

Créer un projet et ajouter une solution
Une solution est un ensemble de configurations fonctionnelles et de données pour le robot, la communication, le traitement de la vision et la planification de trajectoire, nécessaires à une application de vision. Vous devez d’abord créer un projet Mech-Viz avant de passer à l’étape suivante.
Vous pouvez consulter Projets d’exemple pour comprendre le flux de travail et la configuration des paramètres, afin de vous familiariser rapidement avec les fonctionnalités associées. Vous pouvez également consulter Nouveau projet vide dans le manuel utilisateur.
Configurer les ressources du projet
Après avoir créé un nouveau projet vide, vous devez configurer Arbre des ressources du projet nécessaire pour le projet, y compris les outils, les objets cibles et les objets de scène. Ces ressources aident à créer un environnement de simulation plus précis, permettant ainsi de calculer une trajectoire sans collision pour le mouvement du robot.
Construire un flux de travail
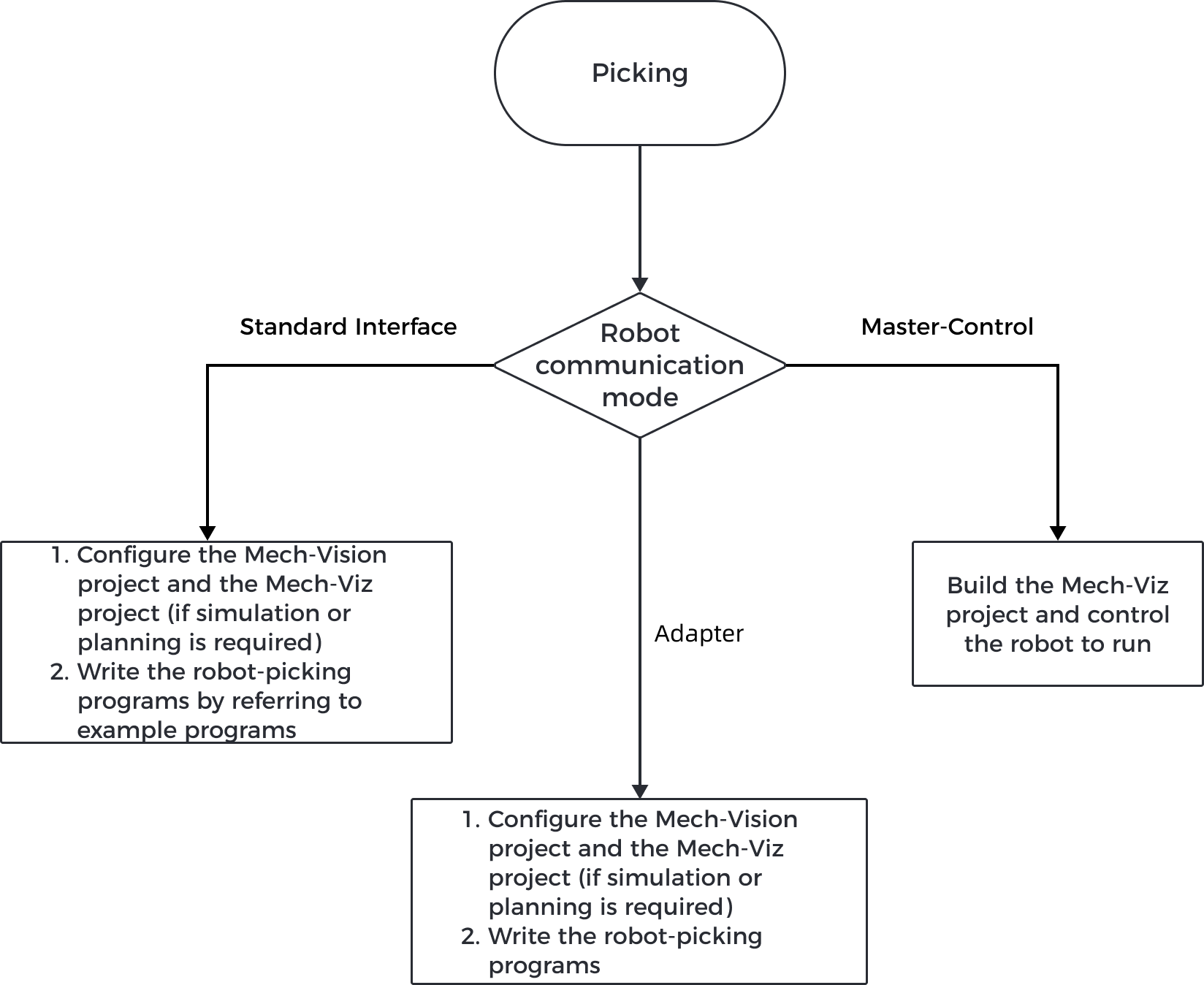
Après la configuration des ressources du projet, vous pouvez commencer à construire un flux de travail afin que le robot prélève des objets avec précision, guidé par les résultats de vision. Selon le mode de communication du robot choisi, la manière de construire le flux de travail varie également, comme illustré dans la figure ci-dessous.
-
Pour utiliser le mode Communication par interface standard, vous devez écrire un programme de prélèvement côté robot afin que le robot puisse exécuter des tâches de prélèvement sur la base des résultats de vision. Pour plus de détails, voir Construire un flux de travail en mode interface standard.
-
Pour utiliser le mode Communication par contrôle maître , vous devez construire un flux de travail de prélèvement du robot (c.-à-d. le projet Mech-Viz) via une interface graphique dans Mech-Viz.
Pour savoir comment créer un flux de travail Mech-Viz, veuillez consulter Créer un flux de travail Mech-Viz.
Configurer la détection des collisions
Dans l’application de picking, il est crucial d’éviter les collisions entre l’outil et les autres objets de la scène, y compris les objets cibles et le bac. Avant de lancer la simulation, veuillez configurer Détection des collisions pour identifier les risques potentiels de collision.
Exécuter le robot simulé
Après la configuration de la détection des collisions, vous pouvez Exécuter le robot simulé et tester le projet, afin de garantir que le projet de picking répond aux exigences sur site.
Si une erreur survient pendant la simulation, par exemple une collision ou un point de passage inaccessible, vous pouvez consulter les messages d’erreur dans Historique des plans et Journal, ce qui permet de localiser rapidement l’erreur puis d’améliorer le projet.
Exécuter un robot réel
Après la réussite de la simulation, vous pouvez Exécuter un robot réel pour le prélèvement.