Calibration main-oeil pour robots à portique
Ce guide pratique présente comment effectuer le calibrage main-oeil pour des robots à portique (également appelés robots à portique).
|
Pour les concepts liés au calibrage main-oeil pour robots à portique et l’utilisation du fichier de paramètres extrinsèques, veuillez vous référer à la section Explication du calibrage pour robots à portique. |
Préparation avant le calibrage
Avant le calibrage main-oeil, vous devez effectuer les préparatifs suivants :
Construire le système de vision
Construisez le système de vision Mech-Mind en vous référant à la section Configuration matérielle du système de vision.
Vous devez utiliser Mech-Eye Viewer, et Mech-Vision&Mech-Viz pendant l’étalonnage main-œil. Veuillez vous assurer qu’ils sont installés et exécutent les dernières versions.
Préparer les matériaux requis pour le calibrage
Le calibrage main-oeil pour robots à portique nécessite les matériaux suivants :
-
Plaque de calibration
-
Pointe affûtée
-
Mètre ruban
Veuillez préparer la plaque de calibration selon les exigences suivantes :
-
Assurez-vous que les cercles de la plaque de calibration sont clairement visibles, sans rayures évidentes, et que la plaque n’est pas déformée.
-
Dans le scénario de calibrage pour robot à portique, placez la plaque de calibration au centre du plan objet, là où les objets cibles seront déposés.
-
La pointe affûtée doit être montée au centre du préhenseur du robot à portique. Le mètre ruban est utilisé pour mesurer l’écart entre la pointe et le centre de la bride du robot dans les directions X, Y et Z.

Contrôler la qualité du nuage de points de la plaque de calibration
| La qualité du nuage de points de la plaque de calibration affectera la précision de la calibration main-œil. Contrôlez la qualité du nuage de points de la plaque de calibration pour assurer l’exactitude et la fiabilité des résultats de calibration. Le processus de calibration inclut l’étape de contrôle de la qualité du nuage de points de la plaque de calibration. Vous pouvez également vérifier la qualité du nuage de points avant de démarrer la calibration afin de gagner du temps. |
-
Placez la plaque de calibration horizontalement au centre du plan de travail dans le champ de vision de la caméra.
-
Ouvrez le logiciel Mech-Eye Viewer, sélectionnez la caméra utilisée par le projet, puis sélectionnez le groupe de paramètres « calib » et ajustez les paramètres de la caméra.
-
Ajustez les paramètres 2D pour que l’image 2D globale ne soit pas trop sombre et que chaque cercle de calibration soit clairement visible.
-
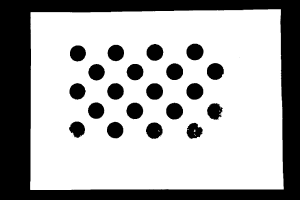
Ajustez les paramètres 3D pour que chaque cercle de calibration sur la plaque soit complet et visible.
Si l’éclairage ambiant sur site est peu idéal et affecte la qualité des images 2D et des nuages de points, vous pouvez utiliser des ombres ou un éclairage d’appoint pour améliorer les conditions de luminosité.
-
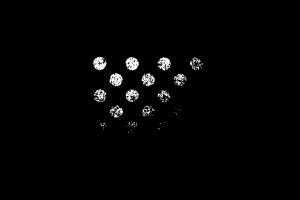
Assurez-vous que la qualité du nuage de points de la plaque de calibration est conforme aux normes après avoir terminé les étapes précédentes.
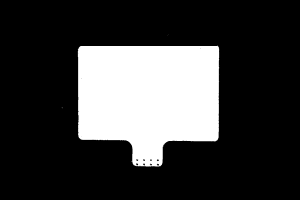
Normal Surexposé Sous-exposé Image 2D
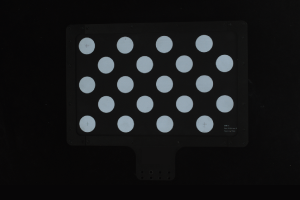
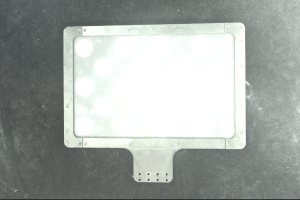

Nuage de points
Effectuer les vérifications préalables
Veuillez vous référer à Vérifications préalables et effectuer les vérifications suivantes :
-
Confirmer que la base du robot est solidement montée.
-
Confirmer que le support de montage de la caméra et la caméra sont solidement fixés.
-
Confirmer que la précision absolue du robot répond aux exigences d’utilisation.
-
Vérifier les paramètres du modèle de robot.
-
Confirmer que la caméra est préchauffée.
Configuration préalable au calibrage
-
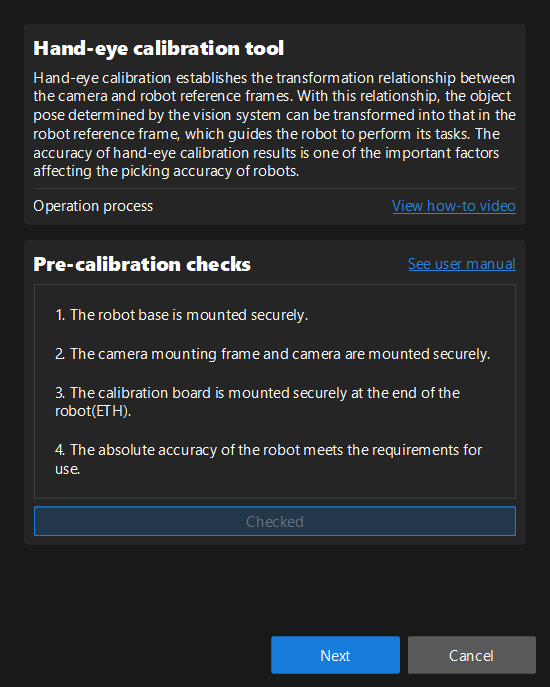
Ouvrez Mech-Vision, puis cliquez sur le bouton Calibration de la caméra dans la barre d’outils. La fenêtre Configuration avant calibrage s’affiche.
-
Après avoir confirmé que les vérifications préalables au calibrage sont terminées, cliquez sur J’ai terminé toutes les vérifications, puis cliquez sur Suivant.
-
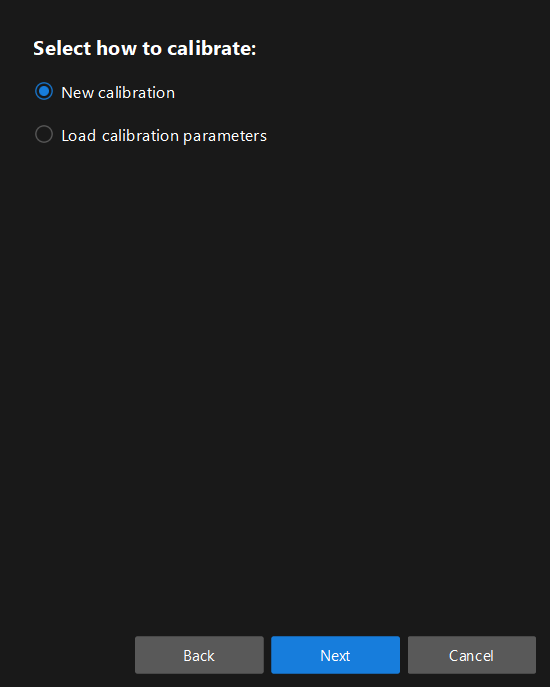
Dans la fenêtre Sélectionner la méthode de calibrage, sélectionnez l’option Nouvelle calibration, puis cliquez sur le bouton Suivant.
-
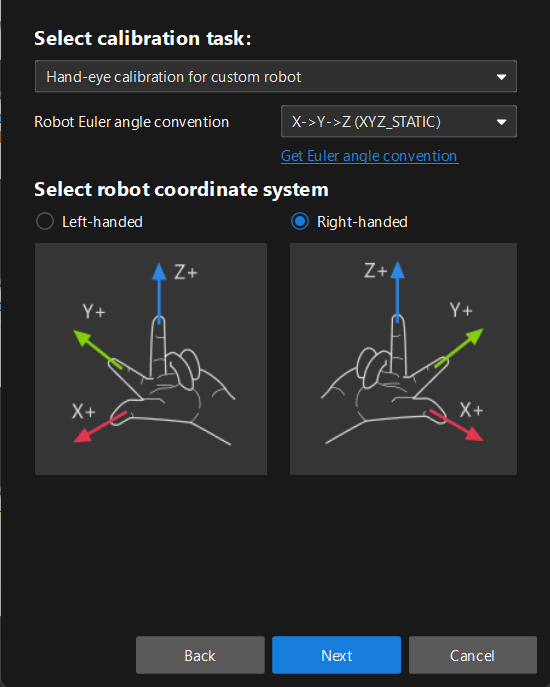
Dans la fenêtre Sélectionner la tâche de calibrage, choisissez Calibrage main-oeil pour robot personnalisé dans la liste déroulante, spécifiez le paramètre Convention des angles d’Euler du robot, sélectionnez le type de système de coordonnées du robot, puis cliquez sur le bouton Suivant.
-
Vous pouvez déterminer le type de système de coordonnées du robot selon la section Systèmes de coordonnées gauchers et droitiers. Si le robot à portique utilise un système de coordonnées gaucher, il vous suffit de sélectionner Gaucher ici.
-
Lorsque le système de vision communique avec le robot, le module de communication transforme automatiquement le système de coordonnées pour les poses envoyées et reçues. Lorsque le module de communication reçoit la pose du robot depuis le robot, il transforme la pose du robot dans le système de coordonnées gaucher vers celui droitier ; lorsqu’il envoie la pose produite par le logiciel au robot, il transforme la pose du robot dans le système de coordonnées droitier vers le gaucher.
-
Lorsque la pose de la bride du robot doit être saisie pendant la procédure de calibrage, vous devez d’abord prendre l’opposé de la valeur de l’axe Y.
-
-
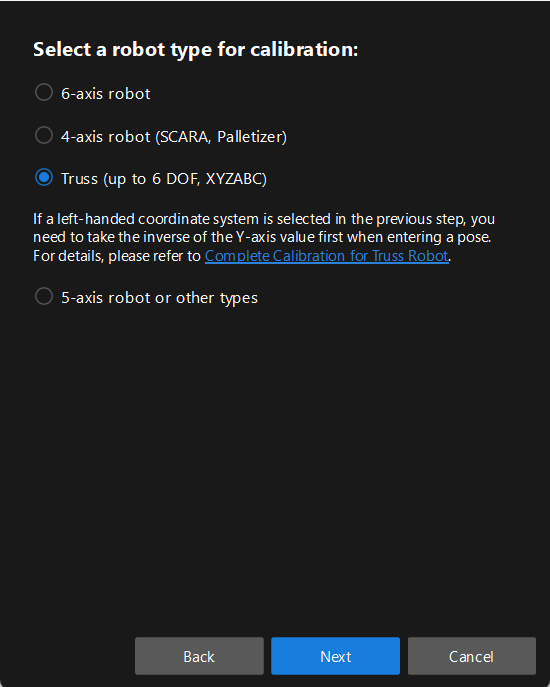
Dans la fenêtre Sélectionner un type de robot pour le calibrage, sélectionnez Truss (jusqu’à 6 DDL, XYZABC), puis cliquez sur le bouton Suivant.
-
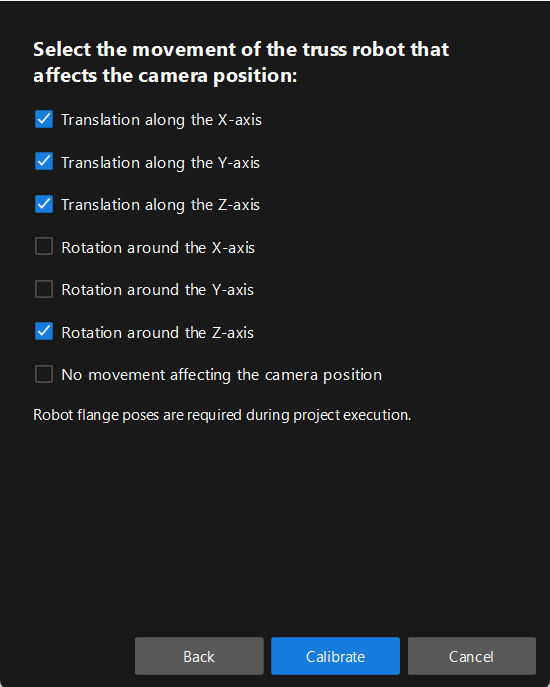
Dans la fenêtre Sélectionner le mouvement du robot à portique qui affecte la position de la caméra, déterminez, selon le montage réel de la caméra, quels mouvements du robot à portique affectent la position de la caméra. Cochez ensuite les cases correspondantes et cliquez sur Calibrer.
À ce stade, vous avez terminé la configuration préalable et pouvez commencer la procédure de calibrage.
Procédure de calibrage
Se connecter à la caméra
-
À l’étape Connexion à la caméra, sélectionnez la caméra à connecter dans la liste ID de caméra, puis cliquez sur le bouton
 ou double-cliquez sur l’entrée de la caméra pour s’y connecter.
ou double-cliquez sur l’entrée de la caméra pour s’y connecter.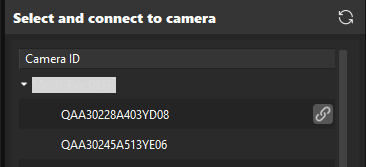
-
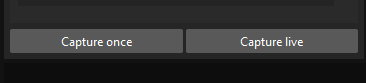
Après la connexion de la caméra, cliquez sur le bouton Capture en direct ou Capturer une fois.
-
Dans le panneau droit Visionneuse d’image, assurez-vous que la caméra capture des images normalement et cliquez sur le bouton Suivant dans la barre inférieure.
Monter la plaque de calibration et vérifier les paramètres intrinsèques
-
À l’étape Monter la plaque de calibration et vérifier les paramètres intrinsèques, définissez le paramètre Modèle de plaque de calibration standard dans la zone 1 Sélectionner la plaque de calibration.
-
Dans la zone 2 Vérifier la position de la plaque de calibration et la qualité du nuage de points, lisez attentivement les exigences concernant la position de la plaque et la qualité du nuage de points, puis cliquez sur le bouton Capturer en continu. Le bouton Capture en direct devient Arrêter la capture et détecter la position.
-
Déplacez manuellement le robot vers une position appropriée, en veillant à ce que la plaque de calibration soit entièrement dans le cadre rouge et que la distance entre la plaque et la caméra soit aussi proche que possible de la valeur recommandée sur l’interface.
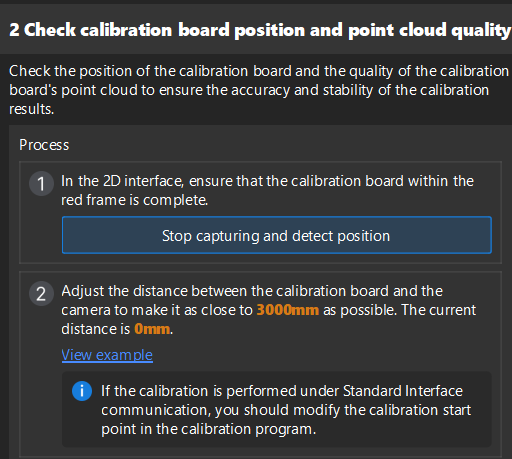
Si le mode de communication Interface standard est utilisé pour la calibration, après avoir ajusté la distance entre la plaque de calibration et la caméra selon les indications de l’interface, la position du robot peut être utilisée comme point de départ de la calibration. -
Veuillez vous assurer que l’image 2D et la carte de profondeur de la plaque de calibration répondent aux exigences, puis cliquez sur le bouton Arrêter la capture et détecter la position.
Si les images capturées ne répondent pas aux exigences, cliquez sur le bouton Ouvrir Mech-Eye Viewer pour ouvrir le logiciel Mech-Eye Viewer, ajustez les paramètres d’exposition 2D et 3D et recapturez des images. Veuillez noter que vous devez d’abord changer le paramètre Groupe de paramètres en « calib ».
-
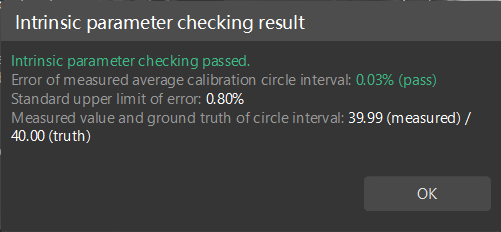
Dans la zone 3 Vérifier les paramètres intrinsèques, cliquez sur le bouton Vérifier les paramètres intrinsèques.
-
Confirmez les résultats de la vérification des paramètres intrinsèques de la caméra.
-
Si la vérification des paramètres intrinsèques de la caméra réussit, cliquez sur le bouton OK dans la fenêtre affichée, puis cliquez sur le bouton Suivant dans la barre inférieure.
-
Si la vérification des paramètres intrinsèques échoue, vous pouvez tracer des cercles d’aide pour faciliter la vérification des paramètres intrinsèques, puis cliquez sur le bouton Revérifier les paramètres intrinsèques.
-
Tracer un cercle d’aide
-
Pour tracer un cercle d’aide, cliquez sur le bouton Tracer un cercle d’aide.
-
Dans le panneau droit Visionneuse d’image, cliquez avec le bouton droit sur l’image de la plaque de calibration, désélectionnez la case Ajuster à la fenêtre, maintenez la touche Ctrl enfoncée et faites tourner la molette pour ajuster l’image à une taille adaptée.
-
Placez le pointeur de la souris sur le point central de la croix du cercle de calibration, appuyez sur le bouton gauche de la souris et ajustez le cercle d’aide pour inclure complètement le cercle de calibration, puis relâchez le bouton gauche.

-
Cliquez sur le bouton Revérifier les paramètres intrinsèques et confirmez que la vérification des paramètres intrinsèques de la caméra réussit. Si la vérification échoue toujours, veuillez contacter le Support technique.
Définir le TCP dans le repère de la bride
-
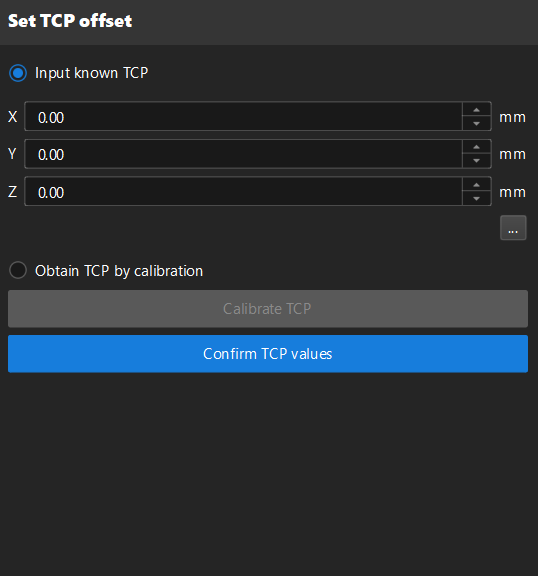
Dans l’étape Définir le TCP dans le repère de la bride, sélectionnez le bouton radio Saisir un TCP connu, puis entrez les valeurs du TCP.
-
Cliquez sur le bouton Confirmer les valeurs du TCP.
-
Cliquez sur le bouton Suivant dans la barre inférieure.
Si les valeurs du TCP sont inconnues, sélectionnez le bouton radio Obtenir le TCP par calibration, puis cliquez sur le bouton Calibrer le TCP. Vous pouvez utiliser l’outil Calibration du TCP pour calculer les valeurs du TCP.
|
Collecter des images et des poses de bride
-
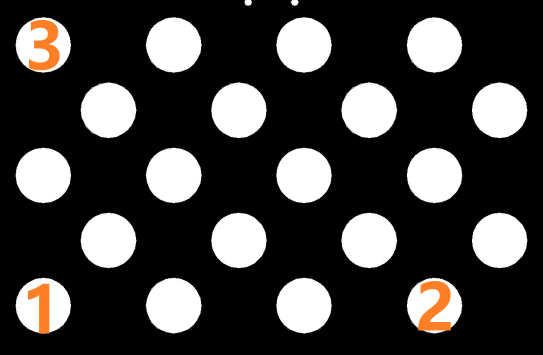
À l’étape Collecter des images et des poses de bride, prenez connaissance des instructions de collecte d’informations de la plaque de calibration.
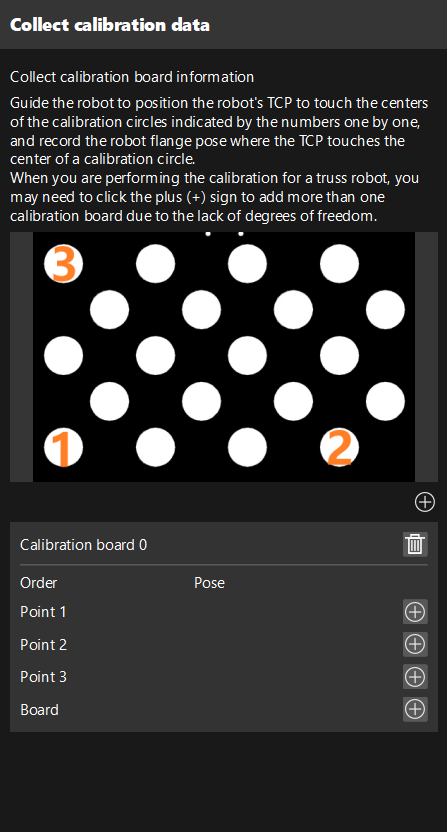
-
Contrôlez le robot à portique pour que sa pointe d’extrémité touche le point central en croix du cercle de calibration « point 1 » sur la plaque de calibration, et enregistrez la pose de la bride du robot sur le pupitre d’enseignement.
-
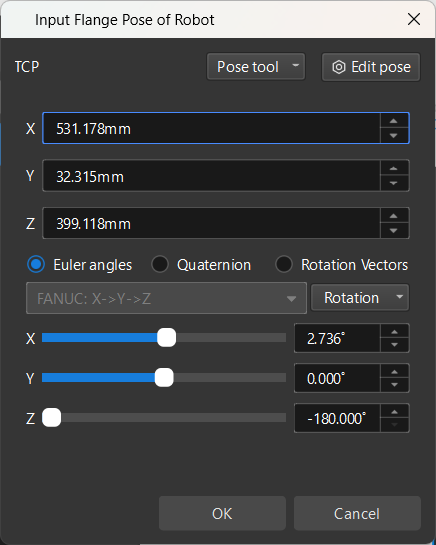
Cliquez sur le bouton
 du point 1, saisissez la pose de la bride du robot dans la boîte de dialogue Saisir la pose de la bride du robot qui apparaît, puis cliquez sur le bouton OK.
du point 1, saisissez la pose de la bride du robot dans la boîte de dialogue Saisir la pose de la bride du robot qui apparaît, puis cliquez sur le bouton OK.Si le robot à portique utilise un système de coordonnées gaucher, vous devez prendre l’opposé de la valeur de l’axe Y avant de saisir la pose de la bride du robot.
-
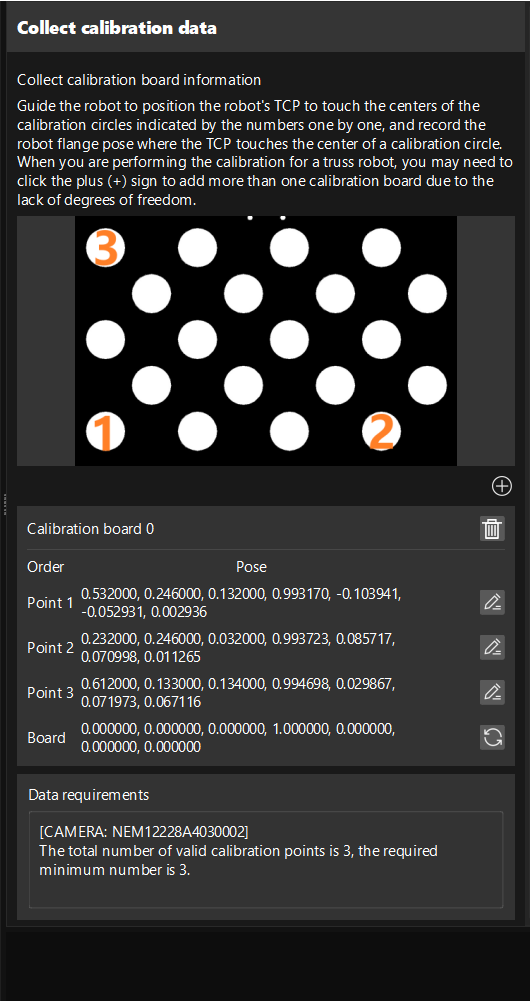
Répétez les étapes précédentes : amenez la pointe d’extrémité à toucher les points centraux en croix des points 2 et 3, et saisissez les poses de la bride du robot.
-
Cliquez sur le
bouton de la plaque de calibration actuelle pour collecter des images de la plaque de calibration, saisissez la pose de la bride du robot dans la boîte de dialogue Saisir la pose de la bride du robot qui apparaît, puis cliquez sur le bouton OK. -
Cliquez sur le bouton Mettre à jour les données, puis cliquez sur le bouton Suivant dans la barre inférieure.
-
Le programme de calibrage exige qu’au moins trois points non alignés soient touchés pour calculer les paramètres extrinsèques.
-
Si le robot à portique manque d’un degré de liberté dans une certaine direction (par exemple en direction Y), vous pouvez ajouter les poses de plusieurs plaques de calibration. Commencez par orienter la plaque de calibration de façon à ce que la pointe puisse toucher deux points sur la plaque, tout en saisissant la pose de la bride du robot et en collectant l’image de la plaque. Ensuite, élevez (ou abaissez) la plaque de calibration dans la direction Z, puis touchez de nouveau des points sur la plaque le long de la direction X, tout en saisissant la pose de la bride du robot et en collectant l’image de la plaque. Assurez-vous que la nouvelle position de la plaque de calibration est significativement différente de la précédente.
-
Valider les résultats du calibrage
Cette section propose des méthodes pour valider rapidement les résultats du calibrage.
Afficher le nuage de points d’erreur dans le visualiseur de nuages de points
Après le calcul des paramètres extrinsèques de la caméra, veuillez effectuer l’opération suivante :
-
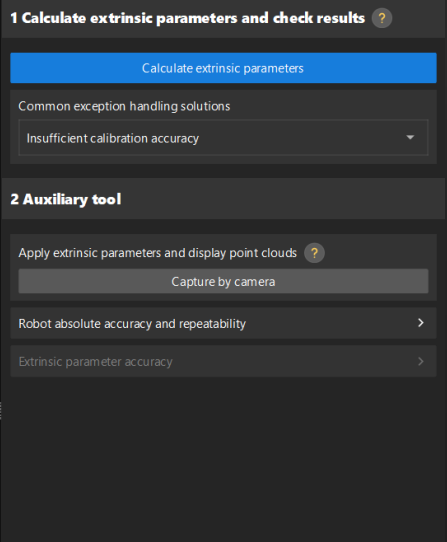
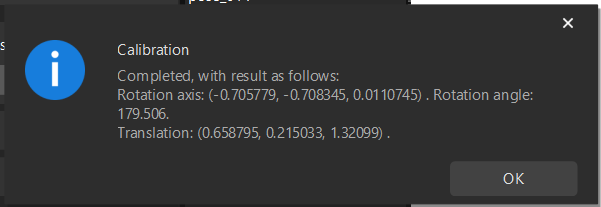
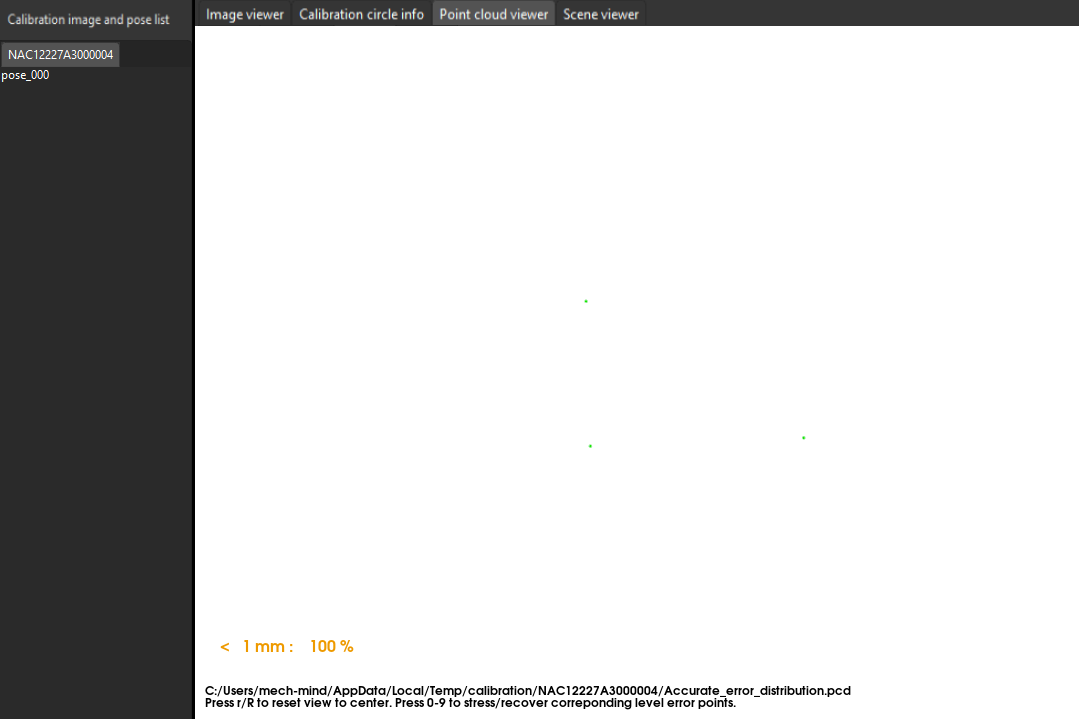
À l’étape Calculer les paramètres extrinsèques, affichez le nuage de points d’erreur dans le panneau droit Visualiseur de nuage de points une fois le calcul de la calibration terminé.
Le nuage de points d’erreur montre l’écart entre la valeur calculée et la valeur réelle des cercles sur la plaque de calibration à chaque point de calibration. Pour la description détaillée, veuillez consulter Description du nuage de points d’erreur. -
Confirmez que l’erreur de précision de calibration répond aux exigences du projet. Recherchez la valeur d’erreur avec un pourcentage de 100 % pour obtenir une précision de calibration approximative.
À l’étape Calculer les paramètres extrinsèques, cliquez sur Précision des paramètres extrinsèques pour ouvrir l’outil. Veuillez suivre les instructions de l’outil pour valider la précision des paramètres extrinsèques et générer le rapport d’évaluation final.
Appliquer le résultat de calibration
Après la validation des paramètres extrinsèques, vous pouvez appliquer le résultat de calibration.
Accédez à l’étape Calculer les paramètres extrinsèques, cliquez sur Enregistrer en bas. Configurez ensuite les paramètres d’enregistrement dans la boîte de dialogue Enregistrer le groupe de paramètres de calibration, puis cliquez sur OK. Le résultat de calibration sera automatiquement enregistré dans le répertoire « calibration » du projet.
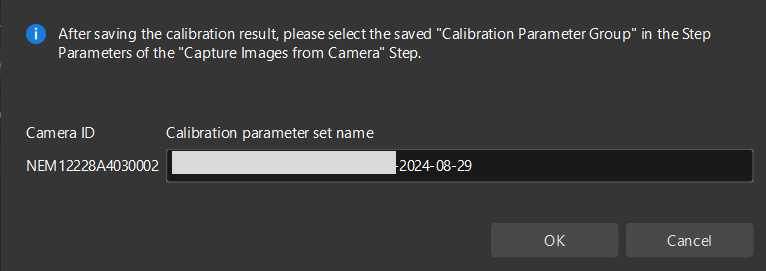
|
Si vous souhaitez que le groupe de paramètres de calibration soit automatiquement appliqué à l’étape « Capturer des images depuis la caméra » du projet après l’enregistrement du groupe, sélectionnez la méthode d’enregistrement suivante selon le besoin réel :
|
À ce stade, le processus de calibration est terminé.