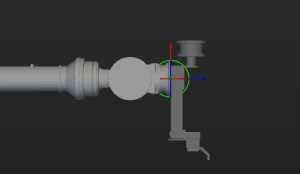
Utiliser Model Editor pour créer des modèles OBJ
Les étapes pour convertir des modèles STL, STP, STEP et des modèles OBJ non conformes en modèles OBJ entièrement composés d’enveloppes convexes sont les suivantes.
1. Importer le modèle de référence
Les formats de fichier pris en charge pour les modèles de référence importés incluent STL, STP, STEP et OBJ.
| Des fichiers de modèle excessivement volumineux peuvent augmenter considérablement le temps d’importation et ralentir les simulations de planification de trajectoire. Il est recommandé d’utiliser un logiciel de CAO pour supprimer à l’avance les fonctionnalités inutiles et maintenir la taille du fichier en dessous de 100 Mo. De plus, assurez-vous que les dimensions physiques du modèle ne dépassent pas 10 mètres. |
Suivez l’une des étapes suivantes pour importer le modèle de référence.
-
Cliquez sur et sélectionnez le fichier du modèle de référence dans la fenêtre de sélection de fichier.
-
Glissez-déposez le fichier du modèle de référence dans l’interface de Model Editor.
Sélectionnez l’unité en fonction des dimensions réelles du modèle dans la fenêtre contextuelle, puis cliquez sur OK.
| Si un message d’erreur « Échec du chargement du modèle » s’affiche, veuillez consulter Déterminer si le fichier STEP/STP est conforme pour vérifier le fichier du modèle. |
2. Définir le repère (optionnel)
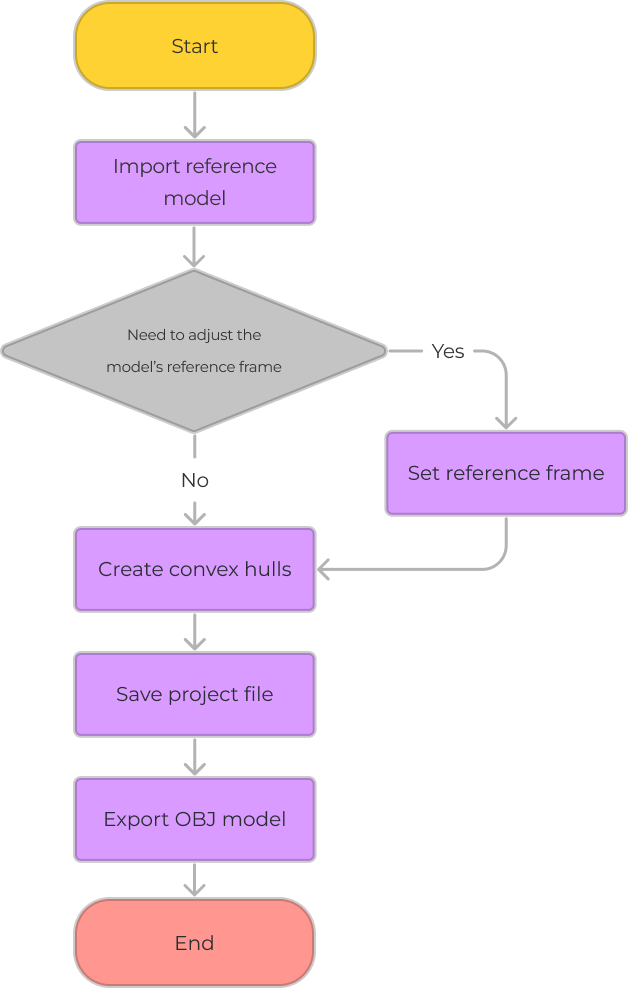
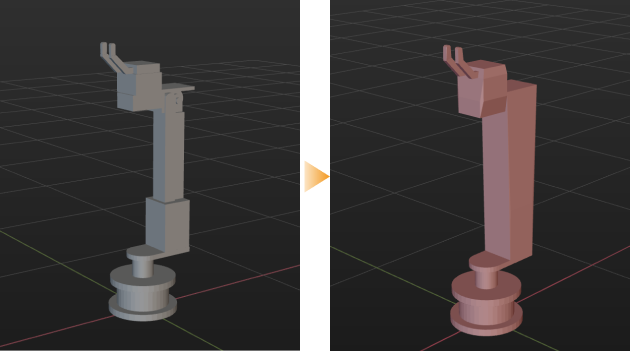
Les modèles d’outil terminal avec différentes poses dans Model Editor sont illustrés dans le tableau ci-dessous, y compris la pose par défaut attribuée lors de l’ajout initial de l’outil via la fenêtre Tool Configuration.
Pose du modèle d’outil terminal dans Model Editor |
Pose par défaut de l’outil lors de l’ajout via Tool Configuration |
|
|
|
|

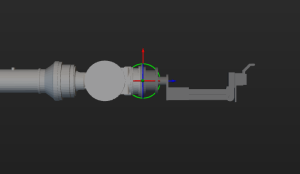
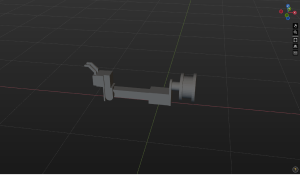
D’après le tableau ci-dessus, nous pouvons constater que si la position d’installation du modèle d’outil sur la bride de l’effecteur terminal du robot ne coïncide pas avec « l’origine du repère de référence du monde de Model Editor », vous devriez ajuster la position ou la taille du modèle d’outil terminal lors de l’ajout de l’outil terminal. Pour éviter d’avoir à ajuster la position du modèle à chaque utilisation, veuillez vous référer au contenu de Ajuster le repère du modèle pour ajuster le repère de référence du modèle.
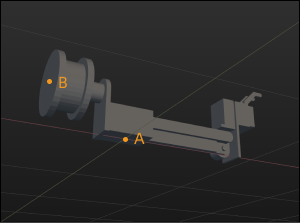
|
A: L’origine du repère mondial de référence de Model Editor; B: L’origine du repère de référence de l’emplacement d’installation du modèle |
3. Créer des enveloppes convexes
Les modèles de collision des outils utilisés dans Mech-Viz doivent être des modèles OBJ entièrement composés d’enveloppes convexes. Une enveloppe convexe doit être créée sur la base du modèle de référence. Le modèle final doit être entièrement composé d’enveloppes convexes et refléter la forme du modèle de référence original.
Il existe deux méthodes pour créer des enveloppes convexes, veuillez sélectionner celle qui convient au modèle réel.
-
Utilisez l’outil de sélection pour sélectionner des sommets et créer une enveloppe convexe basée sur ces sommets.
-
Créez directement une boîte ou un cylindre.
| Avant de poursuivre la lecture du contenu suivant, veuillez lire Guide d’utilisation de l’outil de sélection et Créer un cuboïde ou un cylindre pour apprendre à utiliser les outils concernés. |
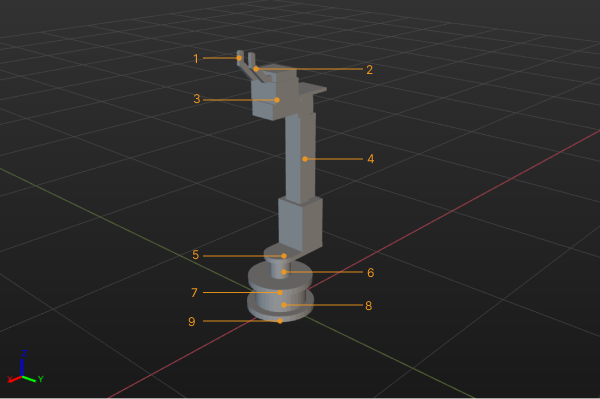
N’utilisez pas l’outil de sélection 3D pour couvrir tout le modèle afin de créer une enveloppe convexe. Il est recommandé de segmenter le modèle en plusieurs parties selon sa structure, et d’utiliser l’outil de sélection 3D pour sélectionner chaque partie et créer des enveloppes convexes séparément. Par exemple, le modèle de la figure ci-dessous peut être segmenté en 9 parties.
Les étapes sont les suivantes:
-
Sélectionnez le nom du modèle dans le panneau « Modèle de référence », puis cliquez sur Outil de sélection (Sélection cuboïde, Sélection cylindrique ou Sélection cylindre elliptique).
-
Ajustez l’outil de sélection pour couvrir les sommets de la partie à traiter, puis cliquez sur Créer une enveloppe convexe.
-
Répétez l’étape 2 jusqu’à ce que les 9 parties du modèle soient couvertes par des enveloppes convexes.
-
Cliquez sur
 à gauche du nom du modèle de référence pour masquer le modèle de référence et afficher le modèle convexe.
à gauche du nom du modèle de référence pour masquer le modèle de référence et afficher le modèle convexe.
|
4. Enregistrer le fichier de projet
Pour faciliter la réédition du modèle, vous pouvez suivre ces étapes pour enregistrer le modèle dans un fichier M3D.
-
Cliquez sur .
-
Spécifiez un chemin d’enregistrement et saisissez un nom de fichier.
-
Cliquez sur Enregistrer.
5. Exporter le modèle après l’édition
Suivez ces étapes pour enregistrer le modèle édité dans un fichier OBJ.
-
Cliquez sur .
-
Spécifiez un chemin d’enregistrement et saisissez un nom de fichier.
-
Enregistrer en tant que type obj(*.obj).
-
Cliquez sur Enregistrer.
Seuls les modèles définis comme visibles dans le panneau Assemblages de Model Editor seront enregistrés, tandis que ceux qui sont masqués ne seront pas exportés.
Une fois le modèle exporté avec succès, vous pouvez ajouter le modèle à Bibliothèque de modèles dans l’arborescence des ressources du projet. Ensuite, vous pouvez définir le modèle de collision correspondant des outils terminaux dans Outils.